
Fターム[5L096EA18]の内容
Fターム[5L096EA18]に分類される特許
1 - 20 / 39
物体認識システム及び物体認識装置
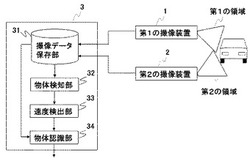
【課題】ラインセンサ等の撮像装置を用いて取得した物体の撮像データを用いてその物体を認識する物体認識システムにおいて、物体の通過速度によって撮像データに含まれる物体の画像が歪むため対象物のテンプレートデータとのマッチングの精度が低下し物体の認識精度が低下するという課題があった。
【解決手段】物体認識部34は、速度検出部32で検出された物体の速度に応じて、撮像装置1、2で取得された撮像データに含まれる物体の画像をサイズ変更し、その変更後の撮像データとテンプレートデータとをマッチングして物体を認識するので、精度高く物体認識ができる。
(もっと読む)
パターン識別装置、方法及びプログラム

【課題】複数のメモリを使ってインテグラルイメージの読み出しを高速に行う方法が提案されているが読み出す局所領域の形状(幅、高さ)に制約を設ける必要があるため、検出精度に影響を与える場合がある。その場合、前記高速化手法で検出精度が低下し要求検出精度を満たせずに問題となる。
【解決手段】パターン識別に使用する複数の局所領域の中でインテグラルイメージの読み出しを高速化できる形状を持つ局所領域と前記形状制約を外して検出精度を重視できる形状を持つ局所領域とに分ける。そして、これらの割合を調整し、検出精度の低下を軽減させる。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び記憶媒体
【課題】ローリングシャッタ歪み成分を安定して正確に推定することができる画像処理装置、画像処理方法及び画像処理プログラムを提供する。
【解決手段】画像処理装置1は、画像入力部10、動きベクトル取得部11及び歪み成分推定部12を備える。画像入力部10は、複数のフレーム画像を入力する。動きベクトル取得部11は、2つのフレーム画像間の平行移動量を取得する。歪み成分推定部12は、フレーム画像間の動きを示す動き行列が平行移動成分及びローリングシャッタ歪み成分のみからなると近似し、平行移動量を用いてローリングシャッタ歪み成分に含まれる仮の歪み係数をフレーム画像ごとに算出し、算出された複数の仮の歪み係数を用いて歪み係数を推定する。
(もっと読む)
画像処理方法、画像処理装置および画像処理プログラム
【課題】高速な顔検出を実現できる画像処理装置を提供する。
【解決手段】取得した画像から平滑化画像を生成するステップと、処理対象画像を含む処理対象画像以前の複数フレームの画像をもとに、各画素の平均値を算出し、算出した各画素の平均値とそれぞれのフレームの該当画素値から分散値を算出するステップと、処理対象画像の平滑化画像の輝度値に対して更なる平滑化処理を行い、正規化用画像を生成し、生成した分散値画像の各画素値に対して、生成した正規化用画像の各画素の値を用いて分散値画像の正規化を行い正規化分散値画像を生成するステップと、正規化した正規化分散値画像に対して膨張処理を実施して補正分散値画像を生成するステップと、補正分散値画像の各画素値に対して任意の閾値処理を行い二値画像を生成して人物領域を検出するステップと、分散値が一定値より大きいと判定された画素に対して顔検出処理を実施するステップとを有する。
(もっと読む)
電子装置、データ生成方法およびデータ生成プログラム
【課題】異なる種類のセンサで検出された信号を比較する。
【解決手段】入力された情報を抽象化する抽象化部24と、抽象化された情報を正規化する正規化部25と、正規化された情報を2つ以上比較し、該比較結果に基づいて該2つ以上の正規化された情報が同種の情報であるか否か判定する比較判定部27と、を備える。
(もっと読む)
奥行き画像内の物体を検出する方法およびシステム
【課題】画像内の物体を検出するスキャンウィンドウ手法であって、計算効率が良い方法で、奥行き画像内の物体を検出する方法を提供する。
【解決手段】奥行き画像内の物体を検出する方法が、奥行き画像内の領域を覆う検出ウィンドウを決定することを含み、該検出ウィンドウのロケーションは、奥行き画像内の候補ピクセルのロケーションに基づき、検出ウィンドウのサイズは、候補ピクセルの奥行き値および物体のサイズに基づいている。検出ウィンドウ内の前景領域が、候補ピクセルの奥行き値および物体のサイズに基づいてセグメント化される。特徴ベクトルが、前景領域内のピクセルの奥行き値に基づいて求められ、特徴ベクトルが分類されて、物体が検出される。
(もっと読む)
物体認識装置および物体認識方法
【課題】識別対象が画像上で変形する場合であっても、その識別対象の認識率を向上させることができる、物体認識装置および物体認識方法を提供する。
【解決手段】物体認識装置1は、記憶部20内に、認識対象の情報を示す監視物体情報210と、カメラ装置のパラメータを示すカメラ情報220を記憶している。そして、物体認識装置1は、監視物体情報210を用いて、監視空間上に検知領域を作成し、その作成した検知領域を、カメラ情報220を用いて、監視画像上の変形検知領域に変換する。物体認識装置1は、変形検知領域の画像情報100について特徴量を抽出し、認識対象の物体か否かを判定する。
(もっと読む)
画像認識装置
【課題】対象物の認識での誤認識を低減すると同時に、認識処理のコストを抑制することができる画像認識装置を提供すること。
【解決手段】認識領域選択部12は、画像撮影部11により取得された画像における特徴的な領域を選択する。選択領域有効化部13は、特徴的な領域のみが認識対象とされるように有効化する。画像特徴量算出部14は、有効化された領域における画像特徴量を算出する。画像特徴量比較部16は、算出された画像特徴量と予め用意された参照画像の画像特徴量を比較する。結果出力部17は、算出された画像特徴量と最も近似するとされた画像特徴量を有する参照画像の識別子を認識結果として出力する。認識結果に関連付けられたメディアを表示させることもできる。
(もっと読む)
画像照合装置または画像照合方法
【課題】 二つの画像がSAR画像と光学画像とで異種である場合に、特徴点やエッジが明確に検出できない場合であっても画像の照合をおこなうことを目的とする。
【解決手段】 本発明によれば、異種画像と光学画像について各々フーリエ変換を行う周波数成分検出手段105a、105bと、異種画像と光学画像の各々の区間の画素列を周波数変換後の周波数成分を照合することによって異種画像と光学画像との位置あわせをおこなう位相照合手段106を備えた。
(もっと読む)
オブジェクト認識デバイス、オブジェクト認識を実施する方法および動的アピアランスモデルを実施する方法
【課題】真のサンプル画像の広範で大きなライブラリーを用いてトレーニングする場合に、より高速な位置合わせプロセスを備えたAAMを提供する。
【解決手段】トレーニングライブラリーのトレーニング画像を、各親ノードのトレーニング画像が特有の特徴の類似性にしたがって二つの子ノードに分割された階層ツリーに配置することにより、動的アピアランスモデル(AAM)が築かれる。各リーフノードの対応するトレーニング画像を使用して、リーフノードにつき一つのAAMが構築される。動作時には、ルートノードから開始して、テスト画像が各親ノードの二つの子ノードと比較され、テスト画像に最も厳密にマッチするモデル画像のノードパスをたどる。テスト画像があるリーフノードに関連付けられることから選択されるAAMに、テスト画像が提示される。選択されたAAMの出力画像は、十分な位置合わせが達成されなければ、階層ツリーに再提示されうる。
(もっと読む)
特徴抽出装置、特徴抽出方法、特徴抽出プログラム、および画像処理装置
【課題】ローカルバイナリパターンを用いつつ、少ない処理負荷で、画質のばらつきに対してロバストな物体検出が可能な画像特徴を抽出することができる特徴抽出装置を提供すること。
【解決手段】特徴抽出部430は、画像から、複数の解像度の解像度画像を生成する解像度画像生成部433と、生成された解像度画像の全部または一部の画素毎に、周囲の近傍画素との画素値の差分が所定の閾値以上であるか否かをデジタル値により示すローカルバイナリパターンを生成するバイナリパターン生成部を含む解像度ヒストグラム生成部434と、複数の解像度画像から生成されたローカルバイナリパターンの分布を示すヒストグラムを生成するヒストグラム生成部436とを有する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】画像の正規化による妨害行為の誤検出及び検出漏れを抑制することができるようにする。
【解決手段】取得された画像は画像分割部63により分割され、更新領域選択部61により更新対象として選択されたブロックのヒストグラムがヒストグラム生成部64により生成される。ヒストグラム保存部62は生成されたヒストグラムを順次更新して保存する。正規化処理部65は、ヒストグラムを正規化するか否かを判定する。変化判定部66は、ヒストグラム生成部64により生成されたヒストグラムと、ヒストグラム保存部62に保存されている過去のヒストグラムの類似度を演算し、その演算結果に基づいて、取得された画像の変化を判定する。本発明は、例えば、監視システムに適用できる。
(もっと読む)
計算機システム、及び画像/図表を位置合わせする方法
【課題】異なる属性を持つ画像及び図表を位置合わせするための特徴量を自動的に求める。
【解決手段】画像と図表との位置合わせをする計算機システムであって、演算部と、記憶部と、入力部と、データ記録部と、を備え、前記受け付けた画像及び図表を前記記憶部から読み出し、前記読み出された画像及び図表の各々をサンプル点を中心とした複数の領域に分割し、前記分割された領域の特性を判定して前記画像及び図表の特徴パターンのセットを生成する特徴パターン生成部と、前記生成された特徴パターンを比較することによって、前記位置合わせをする画像及び図表の対応関係を計算する関係計算部と、前記計算された対応関係に基づいて、前記位置合わせをする画像及び図表の少なくとも一つの座標系を変換する変換部と、前記座標系が変換された画像及び図表を結合する結合部と、を含む。
(もっと読む)
写真画像評価方法、及び写真画像評価装置
【課題】多数の写真画像から様々なテーマに沿った品質の高い好適な写真画像を選択することができる写真画像評価方法、及び写真画像評価装置を提供する。
【解決手段】入力部から入力され記憶部に記憶された複数枚の写真画像に対応する各画像データを評価する基準となる評価値を付与する写真画像評価方法であって、各画像データからシーンを判別してシーン毎に設定した特徴量を抽出し、当該特徴量に基づいて各画像データに評価値を付与する写真画像評価ステップと、写真画像評価ステップで付与された評価値の最大値及び最小値が所定の基準範囲の最大値及び最小値となるように正規化した最終評価値を生成する評価値正規化ステップと、最終評価値を各画像データに関連付けて前記記憶部に記憶する評価値記憶ステップと、を含むステップが演算部により実行される。
(もっと読む)
ボトリング製品検索装置
【課題】特定の規約に基づくIDコードの設定等を行うことなく製品検索ができるボトリング製品検索装置を提供する。
【解決手段】ボトリング製品のラベル貼付部をカメラにより撮影したカメラ撮影画像から対象ボトリング製品を検索するボトリング製品検索装置であって、ラベルのボトル貼付面への中心投影画像に外接する矩形枠を所定のアスペクト比に座標変換して正規化したインデックス画像をボトリング製品の属性に関連付けて格納するデータ格納部と、前記カメラ撮影画像から抽出したラベル画像に外接する矩形枠を座標変換して前記インデックス画像のアスペクト比に一致させる画像変換部6と、画像変換部6での出力画像をインデックス画像中から検索して撮影したボトリング製品を特定する検索部7と、を有する。
(もっと読む)
コンピュータ入力画像中のマーカ認識においてトポロジカルな領域の隣接性とGeometricHashing法を併用するマーカ認識方法
【課題】入力画像中のマーカ認識において以下の(イ)〜(ハ)の問題を解決する。
(イ)既存のトポロジー情報によるマーカ認識手法において同一トポロジー構造だが別図像のマーカ間の区別ができない
(ロ)既存のトポロジー情報によるマーカ認識手法において6自由度の姿勢推定ができない
(ハ)GEOMETRIC HASHING法において、試行すべき基底の数が多いとメモリ使用量や計算量が増大する
【解決手段】 既存のトポロジーによる方法では出来なかった同一トポロジー構造だが別図像のマーカ間の区別と、3次元空間内での姿勢推定を、トポロジー情報とマーカ各領域の重心を使用しGEOMETRIC HASHING法を適用して可能にする。また、GEOMETRIC HASHING法の際にトポロジー情報を併用し基底を選択することで、メモリ使用量や計算量を減少させる。
(もっと読む)
多角度の特定物体の判断装置及び多角度の特定物体の判断方法
【課題】本発明は、多角度の特定物体の判断装置を提供する。
【解決手段】該装置は、画像データを入力する入力装置と、各々が、同一検知角度に対応する複数の分類器の多段接続からなる複数の多段接続分類器グループと、を有し、それぞれの分類器は、それぞれの特徴に対応しており、各分類器は、画像データの各特徴における各検知角度の特定物体に属する信頼度を算出し、該信頼度に基づいて該画像データが特定物体に属しているか否かを判断する装置であって、多段接続分類器グループの分類器間に、自己適応姿勢予測装置を設けて、該自己適応姿勢予測装置の前にある同一検知角度に対応されている各分類器により算出された信頼度から、画像データが該検知角度の該自己適応姿勢予測装置の後にある各分類器に入るか否かを判断する。本発明は、さらに多角度の特定物体の判断方法を提供する。
(もっと読む)
画像検査装置、画像検査方法および画像検査プログラム
【課題】検査精度に寄与する項目を効率的に選択し、選択した項目により検査することのできる画像検査装置を提供する。
【解決手段】基準画像から特徴量を算出し仮基準空間記憶部106に格納する仮基準空間マハラノビス距離算出部104と、直交表においてマハラノビス距離の算出に利用すると規定された項目に対する特徴量を仮基準空間マハラノビス距離算出部104から抽出し、抽出した特徴量に基づいて、各項目を利用する場合、しない場合のSN比を算出するSN比算出部112と、SN比に基づいて項目を選択する項目選択部114と、選択された項目に対応する特徴量を仮基準空間記憶部106から抽出し、抽出した特徴量に基づいて、基準空間のマハラノビス距離を算出する基準空間マハラノビス距離算出部116を備えた。
(もっと読む)
画像検出装置
【課題】高解像度の入力画像により所望の照合画像を検出する際に、探索枠の分割数を最小にすることで画像検出処理の繰り返し回数を抑制し処理負荷を低減することが可能とすること。
【解決手段】画像認識装置が探索する画像探索枠と、照合用画像のアスペクト比を正方形(1:1)にすることで、高解像度の入力画像を分割して画像認識する場合に分割回数を最小に抑えることが可能になり、画像認識処理の負荷を低減させる。
(もっと読む)
物体数計測方法、物体数計測装置、物体数計測プログラム及びこのプログラムを記録した記録媒体
【課題】広視野の撮影範囲内の物体数を直接計測する。
【解決手段】物体抽出処理部4は画像蓄積部3から取得したカメラ2が作成した全方位画像から物体(例えば人)を含んだ画像領域を抽出する。有効領域判定部5は前記抽出された画像領域に含まれる物体の数の計測に有効な画像領域を撮像装置の視野特性に基づき判定する。荷重値テーブル生成部7は前記判定された有効な画像領域を構成する各画素に投影される視体積のうち前記物体の体積に寄与する体積を算出し、これに基づき前記各画素が物体の数にどれだけ寄与するかを示す荷重値を算出し、これを格納させた荷重値テーブルを生成する。人数計測部8は前記抽出された画像領域における各画素が前記判定によって有効領域と判定された場合のみ前記荷重値テーブルに格納された当該各画素の荷重値を積算することにより前記物体の数を計測する。
(もっと読む)
1 - 20 / 39
[ Back to top ]