
Fターム[5L096FA08]の内容
Fターム[5L096FA08]に分類される特許
21 - 39 / 39
タイヤ表面を検査するために使用できるようにするようタイヤ表面の3次元画像を処理する方法
タイヤの表面の一部分を検査する方法であって、表面が隆起マークを有し、この方法では、検査されるべき表面の3次元プロフィールを求め、検査されるべき表面上の特徴的な箇所の存在場所を突き止め、これら箇所を基準面の3次元データから得られた対応の特徴的な箇所と照合して1組の対をなす照合状態の特徴的箇所を生じさせ、繰り返し、第1の変換関数により変換された基準面の特徴的箇所の各々とこれらと照合された検査されるべき表面の特徴的箇所の各々との間の相互間の距離の合計を表す値が最小であるように基準面の特徴的箇所に適用されるべき第1の変換関数を探し、第1の変換関数を基準面の特徴的箇所の全てに適用して変換済み基準面を得る検査方法。  (もっと読む)
(もっと読む)
画像処理装置

【課題】輪郭線の形状の特徴として、特定条件の窪みを効果的に抽出することができると共に、複数の窪みが入り組んでいる構造の特徴も把握することができるようにし、又同様にして、輪郭線の形状の特徴としてその突起も抽出及び構造特徴把握可能とする。
【解決手段】2次元画像に含まれる輪郭線1の、窪みの特徴を示す抽象データを生成するために、輪郭線1上で開始点Sを定め、開始点Sから、探索点T1、T2のような探査点を該輪郭線1上において順次移動させる。又、移動後に、例えば探索点T2において、該移動方向に膨らむ形状の、折れ線又は曲線による探索弧20−2を、探索点の移動方向に対して所定の相互位置関係で発生する。探索弧20−2が、探索点以外で輪郭線1に接触乃至所定基準内まで接近するか否か判定しつつ、輪郭線1の窪みの有無を判定する。
(もっと読む)
乗員情報検出システム、乗員拘束システム、車両

【課題】シート上の乗員に関する情報を精度良く且つ簡便に検出する技術を提供する。
【解決手段】3Dカメラ112と、3Dカメラ112において検出された三次元画像に基づいて、シート上の検出体の立体表面形状に関する情報を抽出する情報抽出処理部151と、情報抽出処理部151によって抽出された情報を、所定の座標系の数値座標に変換する変換処理部152と、変換処理部152によって変換された数値座標のうち、検出体と3Dカメラ112との間に延在する座標軸の座標成分に関し、任意の二点についての第1及び第2の座標成分と、これら任意の二点の中点についての第3の座標成分を用い、第1及び第2の座標成分の平均値を第3の座標成分から差し引いた演算値を導出する演算処理部153と、演算処理部153によって導出された演算値に基づいて、任意の二点及び中点によって形成される線分の凹凸形状を判定する判定処理部154を有する構成とされる。
(もっと読む)
ローラの検査方法
【課題】多孔質弾性体からなるローラにおける外周面の粗さを客観的に把握することができ、その結果、品質判定作業の効率を向上できるとともに品質判定のばらつきを抑さえることができるローラの検査方法を提供する。
【解決手段】ローラの投影画像からローラ本体の外周面の輪郭線を検出し、この輪郭線を構成する複数の画素の座標を取得する。次に、ローラの中心軸線に平行な基準線と、その複数の画素との間の距離を求める。そして、各距離の値から、その分散を求める。距離の分散は、ローラ本体の外周面の粗さに良く対応する。従って、距離の分散から、ローラ本体の外周面の粗さを客観的に判定することができる。
(もっと読む)
タッチパネル式入力装置、及びこれを備えた表示入力システム
【課題】専用エリアを設けることなく操作者を判別することができるタッチパネル式入力装置を実現する。
【解決手段】パネル表面に対して互いに異なる複数の方向に位置する操作者からの指による入力を受付けるタッチパネル式入力装置は、パネル表面に触れた指の方向を認識するための方向認識手段(紋様認識部71、接線角度算出部72、角度演算部73)と、認識された指の方向に基づいて、何れの方向に位置する操作者からの入力であるかを特定する操作者特定手段(操作者特定部74)とを備える。
(もっと読む)
テンプレートマッチング方法、および走査電子顕微鏡
【課題】設計パターンをテンプレートとし、画像からテンプレートと一致するパターンを抽出するときに、画像に下地パターンが現れていても誤判断のないテンプレートマッチング方法、および走査電子顕微鏡を提供する。
【解決手段】試料へ電子線を照射して発生する二次電子の情報を用いて試料を画像化する走査電子顕微鏡において、前記試料に加工するパターンの設計データからエッジを抽出し、該エッジをテンプレートとして登録する記憶部と、前記画像のパターンのエッジを抽出し該エッジと前記設計データのエッジとを比較して、前記画像のパターンと前記設計データとの一致度を判断する演算部とを備える。
(もっと読む)
深度マップを画像から判定する方法、深度マップを判定する装置
ウィンドウ・ベースのマッチングは、別々の向きから得られる画像から深度マップを判定するために使用される。固定マッチング・ウィンドウの組が、深度を判定する画像の点に対して使用される。マッチング・ウィンドウの組は、画像の点周りの画素のフットプリントを包含し、フットプリント(FP)の画素が属するマッチング・ウィンドウの平均数(O)は、フットプリントにおける画素数を15で除算した数に1を加えた数未満(O<FP/15+1)、好ましくは、フットプリントにおける画素数を25で除算した数に1を加えた数未満(O<FP/25+1)である。
 (もっと読む)
(もっと読む)
形状認識装置及び歪評価装置
【課題】スプリングバックなどによる変形が発生していたとしても被測定面の形状認識を正確に行うことができる形状認識装置を提供する。
【解決手段】被測定面の三次元計測データに基づいて形状認識を行う形状認識装置50が被測定面の凹凸を表す計測データの二次元断面データのうち、断面の長さ方向に沿った複数の第1データ群に対して、一定の曲率を有する第1近似曲線を夫々適用する近似曲線適用手段43と、複数の第1近似曲線の曲率を導出する曲率導出手段44と、曲率導出手段44により導出された複数の曲率の、断面の長さ方向に沿った変化データに基づいて、曲率が断面の長さ方向に沿って一様な一様範囲を決定する一様範囲決定手段45と、二次元断面データのうち一様範囲決定手段45が決定した一様範囲内に存在する第2データ群に関して、一定の曲率を有する第2近似曲線を導出する近似曲線導出手段46とを備える。
(もっと読む)
3次元形状評価方法及び3次元形状評価装置
【課題】外形が変化するワークであっても、3次元形状を正確に評価することがで、容易に評価することのできる3次元形状評価方法及び3次元形状評価装置の提供。
【解決手段】断面データ計算S4は点群データからワークWの所定断面における外形形状を表す断面データを求め、線分決定S5は断面データのうちの1つを第1点A1とし第1点A1から引いた所定の基準直線lが外形形状と当接又は接する第2点A2を求める。歪み量計算S7は評価点から外形形状までの距離を歪み量Lとして求め、断面歪み量計算S10は第1点A1を断面データ上で一定距離毎に移動させ線分決定S5及び歪み量計算S7を各々実行し立体歪み量計算S11は所定断面から一定距離毎に平行にずらした各断面における断面データ計算S4及び断面歪み量計算S10を実行する。回転歪み量計算S12はワークWを一定角度毎に回転させた各断面における立体歪み量計算S11を実行する。
(もっと読む)
画像処理装置
【課題】 画像信号に基づいて形成された画像に不定の表面構造があっても色状態を制御できる。
【解決手段】 画像信号が入力されると、ユーザが所望する出力信号での光沢情報を入力し(32)、入力されたCMYK画像信号に基づいて、画素毎に、各画像のCMYKの値の総和であるカバレッジを算出する(34)。上記光沢の指定により、カバレッジと測色値(Lab)とを関係付けることができ、よって、この関係と上記算出されたカバレッジとから、測色値(Lab)を出力し(36)、この測色値(Lab)をデバイスの色信号(CMYK)に変換する(38)。
(もっと読む)
領域抽出装置および領域抽出プログラム
【課題】撮像対象に対応する対象領域を安定して高精度に抽出できること。
【解決手段】領域抽出装置1は、入力された画像を平滑化した平滑化画像を生成する平滑部7と、平滑化画像内の各画素が有する平滑化画素値に基づいて、平滑化画像の中から少なくとも撮像対象の一部を含む初期領域を検出する初期領域検出部8と、初期領域の輪郭近傍画素が有する平滑化画素値に基づいて、輪郭近傍画素が対象領域を構成する対象領域画素であるか否かを判別し、判別結果に応じて初期領域の大きさおよび形状の少なくとも一方を変形して変形領域を成形する領域変形部9と、各変形領域の中から、隣接する変形領域によって形成された隣接領域群を検出し、隣接領域群内の隣接した変形領域間の特徴を示す特徴量に基づいて、この隣接した変形領域同士を統合して対象領域を成形する領域統合部10と、を備える。
(もっと読む)
物品確認装置、物品確認方法及び物品確認プログラム
【課題】物品表面が劣化しても容易且つ高精度に真正を確認することのできる物品確認装置、物品確認方法及び物品確認プログラムの提供。
【解決手段】光源部22により照明されたカード表面の所定領域を、カメラ24により撮像して当該物品表面の再現不能な微細な特徴を含む特徴画像を示す画像情報を取得し、この画像情報を前記物品の特徴情報として外部記憶装置34に記憶しておき、前記物品が真正であるか否かを判定する際に、CPU12により、当該物品表面の前記所定領域における前記画像情報を確認用情報としてカメラ24により取得し、取得した前記確認用情報と外部記憶装置34により記憶されている前記特徴情報とのパターンマッチングにより前記特徴画像が同一か否かを判定し、同一であると判定した場合に外部記憶装置34により記憶されている前記特徴情報を前記確認用情報に更新する。
(もっと読む)
物品確認装置、撮像装置及び物品確認方法
【課題】偽造媒体の作成を困難にすると共に、容易且つ高精度に物品の真贋を確認することができる物品確認装置を提供する。
【解決手段】カード等の物品40を登録するときに、照明光の方向及び撮像方向の少なくとも一方を異ならせて基準の物品表面の再現不能な微細な特徴を含む特徴画像を同一撮像範囲50について複数個撮像し、該撮像した複数個の特徴画像または該撮像された複数個の特徴画像に含まれる特徴情報を該複数個の特徴画像毎に登録する。確認対象の物品が登録された基準の物品か否かを確認するときには、確認対象の物品表面の特徴画像を、基準の物品を撮像したときと同じ条件で複数個撮像し、該撮像した複数個の特徴画像と基準の物品の複数個の特徴画像とを比較した結果、または該撮像された複数個の特徴画像に含まれる特徴と基準の物品の複数個の特徴画像に含まれる特徴との比較結果に基づいて、確認対象の物品が基準の物品であるか否かを判定する。
(もっと読む)
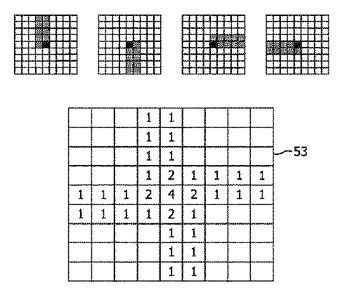
テレインマップ要約要素
テレインマップ要約要素(TMSE)データ構造の使用による画像データの分析のための方法およびシステムが開示され、該テレインマップ要約要素データ構造において、テレインマップデータ構造は元の画像からの2x2画素のカーネル毎について処理されたプリミティブデータを提供する。新たなTMSE構造は、テレインマップ要素の階層的な複数レベルまたは層の構造であり、該階層的な複数レベルまたは層の構造において、各順を追ったテレインマップレベルは、例えば16個の下位レベルの要素またはメンバーを要約する。マップ要素のこのような階層的な特質を提供することによって、各より高い要素によって豊富さが高められる。なぜならば、各順を追ったより高いレベルのマップの全ての要素が下位レベルのマップの要素からのデータを要約するからである。  (もっと読む)
(もっと読む)
画像処理装置、画像処理方法、画像処理方法のプログラム及び画像処理方法のプログラムを記録した記録媒体
【課題】 本発明は、画像処理装置、画像処理方法、画像処理方法のプログラム及び画像処理方法のプログラムを記録した記録媒体に関し、例えば解像度の変換に適用して、丸まった角を尖らせるようにする。
【解決手段】 本発明は、画素値の勾配が最も大きなエッジ勾配方向に直交するエッジ方向v2を検出し、このエッジ方向v2の交点qに基づいて画素値を補正する。
(もっと読む)
直射光検出装置
【課題】 運転者の眼に直射光が当たっているか否かを確実に判定する。
【解決手段】 ビデオカメラ10から出力された映像信号に含まれる運転者の顔画像を顔画像取得部20により取得し、眼座標出力部21によって顔画像に基づき運転者の眼位置を示す眼座標を検出すると共に眼座標の追跡を行う一方で、開閉眼判定部22によって顔画像と眼座標とに基づき運転者の眼の開閉状態を学習して判定しつつ運転者の眼開度を取得する。また、ビデオカメラ10の撮像条件を撮像状態取得部23によって取得するとともに、眼付近領域測光部24によって、顔画像、眼座標、及び撮像条件に基づいて、運転者の眼付近領域の光量を測光する。また、直射光検出部25により、眼開度と光量とに基づいて、運転者の眼に直射光が当たっているか否かを判定し、直射光検出手段25による判定結果を示す直射光信号を直射光信号出力部26から出力する。
(もっと読む)
物体表面における測定対象凹部或いは凸部の幅測定方法および体積測定方法
【課題】 発電プラントやタービン等に用いられる材料の脆化度を粒界腐食溝の幅や深さなどで評価する際等に適用して有用な、物体表面にある凹部或いは凸部の幅やその体積を高精度に画像解析で測定することができる測定方法を提供する。
【解決手段】 物体表面を測定して得た三次元画像データから、該物体表面上にある測定対象凹部或いは凸部の幅や体積を算出するにあたり、該三次元画像データをコンピュータに入力して、高さ方向の情報を明暗で表した二次元表面形状画像(白黒濃淡画像)を表示し、該表示した二次元表面形状画像の全体に一様に生じている上下および左右の方向に沿った明度勾配をなくすことで該三次元画像データの水平補正処理をし、該水平補正処理後の二次元表面形状画像上で、該画像中の測定対象凹部或いは凸部をトレースしてマスク画像を生成し、該マスク画像で覆われた部分の幅および体積を該三次元画像データに基づいて算出する。
(もっと読む)
物体表面にある測定対象凹部或いは凸部の体積算出用プログラム、及び該プログラムを記録したコンピュータ読み取り可能な記録媒体。
【課題】 物体表面にある凹部或いは凸部の体積をコンピュータを用いた画像解析で高精度に計測可能な体積算出用プログラムを提供する。
【解決手段】二次元表面形状画像(1)全面に最大値/最小値フィルター処理をし、測定対象部位両側部の表面高さで凹凸部を消去した2つの画像(2),(3)を得る。画像(1)−(2)の処理をして低表面側高さで段差をなくした低位置側補正三次元画像(4)を生成し、当該画像(4)を閾値1で2値化して矩形化三次元画像(6)を生成する。画像(1)−(3)の処理を行い、高表面側高さで段差をなくした高位置側補正三次元画像(5)を生成する。画像(5)と(6)の論理積処理をして、画像(5)上で拡幅されている測定対象部位の幅を画像(6)の矩形幅に縮小した縮小補正三次元画像(7)を生成する。画像(7)−(4)の処理を行い、測定対象部位段差部の補正矩形画像(8)を生成する。画像(4)の体積と画像(8)の体積の半分とを加算して対象部位の体積とする。
(もっと読む)
有界三次元対象物の分類と空間ローカライゼーションのためのコンピュータ視覚システム
本発明は、有界三次元対象物の認識、分類、および空間ローカライゼーションのためのシステムと方法に関する。特には、対象物の認識、分類、およびローカライゼーションのためのコンピュータ化された方法に関する。本方法は、カメラにより記録された、または対象物のCAD表現を使用して構築された多数のトレーニング図に基づいて、トレーニングデータベースを生成することを含む。特徴的曲線は、トレーニング図から導出され、曲線のプリミティブが検出される。フィーチャの本質的および非本質的記述子が、対象物のクラスおよび図の姿勢状態に関するデータと共にデータベースに格納される。最終的には、認識は二段階で行われる。最初は、認識図の本質的記述子がデータベースの記述子と比較される。二番目に、最良の整合フィーチャから、どのフィーチャが、同じ姿勢状態にある同じ対象物クラスであることを示唆するという意味で、相互に一致するかが調べられる。 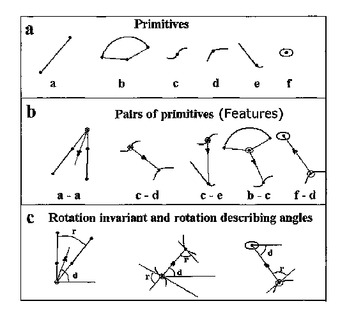 (もっと読む)
(もっと読む)
21 - 39 / 39
[ Back to top ]