
Fターム[5L096FA26]の内容
Fターム[5L096FA26]に分類される特許
1 - 20 / 164
情報端末装置
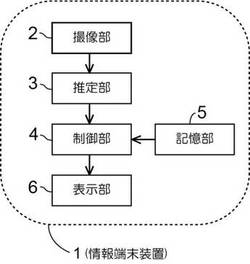
【課題】簡素且つ高精度に撮像対象の大きさを推定して、その大きさに応じて表示情報の制御を行うことのできる情報端末装置を提供する。
【解決手段】撮像部2と、撮像対象の大きさを推定する推定部3と、情報を表示する表示部6と、表示部6で表示する情報を記憶する記憶部5と、推定された大きさに関連する情報を記憶部5から読み出して制御する制御部4とを備え、推定部3が、撮像対象の一面上に設けられた大きさ及び形状が既知のタグを検出するタグ検出部と、タグの周囲に形成される撮像対象の領域を抽出する領域抽出部と、検出タグの配置とタグの所定配置との比較に基づいて、検出タグの撮像部2に対する姿勢を推定する姿勢推定部と、推定姿勢に基づいて抽出された撮像対象の一面の大きさと、その一面を除外した奥行き部分の大きさとを推定するサイズ推定部とを含むよう情報端末装置1を提供する。
(もっと読む)
対象検知方法及び対象検知システム

【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
視線分析装置、視線計測システム、方法、プログラム、記録媒体
【課題】本発明の課題は、被験者の視線を推定・追跡することで、評価対象印刷物の掲載情報または陳列棚の商品の注目度を分析評価するシステムを提供することである。
【解決手段】
メガネを通して見るシーン画像とシーン画像上の注視点座標を視線分析装置に送信する視線追跡メガネと、基準画像および基準画像の分割画像の、特徴点の座標と特徴量を記憶する手段と、視線追跡メガネからシーン画像と注視点座標を受信する手段と、シーン画像の特徴点の特徴量と分割画像の特徴点の特徴量とに基づき最も類似度評価の高い特徴点を組み合せる手段と、最も多い組合せ個数を持つ分割画像の特徴点の座標とシーン画像の特徴点の座標に基づいて座標変換行列を算出する手段と、座標変換行列とシーン画像上の注視点座標から算出した分割画像上の注視点座標を、基準画像に変換して注視点マークを合成する手段と、を備える視線分析装置と、特徴とする視線計測システムである。
(もっと読む)
データストリームにブロック単位で予測符号化されたビデオフレームのブロックの顕著性値を決定する方法及び装置
【課題】計算コストの低い顕著性モデルを生成すること。
【解決手段】本発明の一態様は、データストリームにブロック単位で予測符号化されたビデオフレームのブロックの顕著性値を決定する方法であって、当該方法は、処理手段を用いて前記顕著性値を決定するため、前記ブロックの変換された残差の符号化コストを決定し、前記決定された符号化コストを利用することを有する方法に関する。
(もっと読む)
画像処理装置
【課題】パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、輝度が復元された一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部176と、を備え、色復元部およびマッチング処理部は、ベイヤー配列で占有度が最も高い色相のみを対象に、それぞれ輝度の復元およびマッチングを実行する。こうして、パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
画像検索方法、システム、及びプログラム
【課題】大規模画像データベースから特定の平面オブジェクト検索をする。
【解決手段】クエリ画像からの特徴をセグメントまたはポリゴンとしてグループ化する(700)。後続の変換においては少なくとも2つの特徴を利用する。セグメントまたはポリゴンの変換を実行してクエリ画像に対するインライア特徴を判定する(701)。変換は、ハフ変換であってもよい。クエリ画像のインライア特徴を、対応する登録画像のインライア特徴と比較する(702)。比較は、パラメータ空間またはハフ空間で行なってもよい。
(もっと読む)
画像分類方法
【課題】形容詞によって画像を分類する画像分類方法を提供する。
【解決手段】少なくとも2つの色面に関する画像の2次元分布関数の各々を入力する分布関数入力ステップと、2次元展開係数によって2つの分布関数の各々を記述する記述ステップと、2次元展開係数の各々を12通りの一次元配列の展開係数に並び替える並び替えステップと、対称積で表される2次形式の要素を12×12通りの並び替えの方向組み合わせについてそれぞれ生成する要素生成ステップと、生成された144通りの2次形式の要素の各々について、一定の量子数の差を持った全ての要素の和をとった物理量を、複数の量子数の差に対して生成する物理量生成ステップと、生成された各々の物理量の少なくとも1つに基づき、画像の2次元分布関数の形状の特徴を評価する評価ステップと、評価結果に基づいて画像を少なくとも2つの範疇の画像に分類する分類ステップとを備える。
(もっと読む)
直線検出装置および直線検出方法
【課題】画像内の方向や位置に依存することなく、同様の基準で、ハフ変換を利用した直線検出処理を行うことを課題とする。
【解決手段】ハフ変換部14は、輪郭強調された2値画像データ104に対してハフ変換を実行する。ハフテーブル15には、ハフ変換後の集計値が格納される。直線算出部161は、2値画像データ104内の各直線について、各直線が2値画像データ104を切り取るときの交点を求め、交点間距離Lenを算出する。正規化部162は、ハフテーブル15に格納された集計値を交点間距離Lenで除算し、集計値を正規化する。直線検出部16は、正規化された集計値に基づき、直線を検出する。
(もっと読む)
画像処理装置および方法、記録媒体、並びにプログラム
【課題】画像からグローバル動きベクトルを適切に抽出できるようにする。
【解決手段】クラスタリング部42は、所定のサイズのブロック単位で求められるローカル動きベクトルLMVと、遅延バッファ44に格納されている複数のクラスタ毎の代表となる動きベクトルとの距離を求め、距離が最小となる動きベクトルの属するクラスタに、ローカル動きベクトルLMVを分類し、分類したクラスタの情報とローカル動きベクトルLMVとを出力する。平均値算出部43−1乃至43−5は、それぞれ自らのクラスタのローカル動きベクトルLMVを蓄積して、その平均となる動きベクトルを算出し、これをクラスタを代表する動きベクトルとして出力する。GMV決定部45は、クラスタを代表する動きベクトルのうち、要素数の最も多い動きベクトルをグローバル動きベクトルGMVとして出力する。本技術は、画像処理装置に適用することができる。
(もっと読む)
画像の照明検出
【課題】画像における照明を分割するための方法を提供する。
【解決手段】好ましくは2個又は3個であるm個の光源を有する画像は、例えばフィルタ処理済の画像とフィルタ未処理の画像とである相異なるフィルタリングを有するペアをなす画像を取得し、事前に計算されたm個のマッピングからなる集合をピクセルレベル又は領域レベルで画像ペアに適用し、最適なものを選択することによって、それぞれがm個の光源の1つのみによって照らされる相異なる領域に分割される。画像の情報のレンダリングはそれに従って調整されてもよい。
(もっと読む)
画像認識装置、画像認識方法、及びプログラム
【課題】局所領域ごとの属性に基づいた画像の認識の利点を生かしつつ、より容易に画像を認識することを目的とする。
【解決手段】入力画像から複数の局所領域を切り出して特徴量を抽出する抽出手段と、抽出手段で抽出された特徴量を、局所領域ごとの属性に対する度合いを表す特徴量に射影行列を用いて変換する射影手段と、射影手段で変換された特徴量を登録画像の特徴量と照合する照合手段と、照合手段での結果を統合して入力画像と登録画像とが同じものであるかを識別する識別手段とを有することによって課題を解決する。
(もっと読む)
運転支援装置
【課題】道路のスロープ特性と渋滞予兆とを考慮して燃費を向上させるための車両の運転支援装置の提供。
【解決手段】カメラから路面映像を受信する路面映像入力手段135と、路面映像を鳥瞰変換する鳥瞰変換手段136と、鳥瞰変換された路面映像から複数個の車線を抽出する車線抽出手段137と、抽出された複数個の車線の傾きを算出する傾斜度算出手段138と、複数個の車線の傾の差異値を利用して路面傾斜度を算出する路面傾斜度算出手段139と、自車両の加速度を検出する手段と、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段と、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133とを備える。運転支援装置は、路面傾斜度が所定値よりも大きく、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】画像中の特定領域の位置・姿勢を高精度に推定可能な、画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】入力画像I1の特徴点を抽出する特徴点抽出部11と、参照画像Rとの間で特徴点の対応関係を決定するマッチング部12と、対応関係に基づき入力画像I1と参照画像Rの射影関係を算出するホモグラフィ算出部13と、射影関係に基づき入力画像I1の少なくとも一部を変換する画像変換部14とを備え、ホモグラフィ算出部13は、入力画像I1について、参照画像Rとの間で特徴点の対応関係に基づきホモグラフィ行列H1を算出し、画像変換部14によりホモグラフィ行列H1に基づき変換された入力画像I1について、参照画像Rとの間で特徴点の対応関係に基づきホモグラフィ行列H2を算出し、ホモグラフィ行列H1、H2に基づき入力画像I1と参照画像Rの射影関係を再び算出する
(もっと読む)
車両用白線認識装置
【課題】演算時間を軽減しつつ、精度よく白線近似線を求めることができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、実空間上での白線の概略形状を近似する仮白線近似線の各係数を同定するに際し、前フレームで認識した白線近似線に基づいて低次側係数を同定し、同定されていない複数の高次側係数の組合せを、実空間上に投影された白線候補点Pd毎に当該白線候補点Pdの座標と低次側係数とを用いて複数パターン演算し、最も多く演算された高次側係数の組合せを仮白線近似線Ltの高次側係数として同定する。そして、仮白線近似線Ltを基準とする候補点選定領域Asを設定するとともに、当該候補点選定領域As内に存在する白線候補点Pdを最終的な白線候補点Pとして選定し、選定した白線候補点Pに基づいて白線近似線Lを演算する。
(もっと読む)
特徴量取得装置、類似画像検索装置、特徴量取得方法およびプログラム。
【課題】画像特徴量を抽出した学習用の画像に比べて、類似画像検索の対象である画像内の物体の位置がずれている場合であっても、その位置ずれによる類似画像検索の精度の低減を軽減すること。
【解決手段】画像データに基づき、画像上において特徴量を算出するために画像を区分する単位領域として、同心円の複数の扇状形状の領域を決定する領域決定部と、前記画像データの画素値の平均を前記単位領域毎に算出することにより、入力画像の特徴量を算出する特徴量算出部と、を備えることを特徴とする。
(もっと読む)
紙片識別システム、紙片識別装置
【課題】 紙片を高精度に識別する,紙片登録・識別装置および方法を提供する。
【解決手段】 紙片登録装置と紙片識別装置とからなる紙片識別システムにおいて、紙片登録装置は、紙片から特徴量を抽出する第1の特徴量抽処理出部と、第1の特徴量抽出処理部により抽出された特徴量に関する情報を紙片に印刷する印刷部とを有し、紙片識別装置は、紙片から特徴量を抽出する第2の特徴量抽処理出部と、紙片から前記印刷部により紙片に印刷された特徴量に関する情報を取得する特徴量取得部と、特徴量に関する情報から特徴量を抽出する特徴量復号化部と、特徴量復号化部により抽出された特徴量と第2の特徴量抽出部により抽出された特徴量との類似度を判定する類似度計算部とを有する。
(もっと読む)
移動量推定装置および移動量推定方法
【課題】移動体の移動量を精度よく推定する装置または方法を提供する。
【解決手段】移動量推定装置は、投影部、抽出部、推定部を備える。投影部は、移動体に取り付けられた複数のカメラにより得られる各映像についてそれぞれ路面投影像を生成する。抽出部は、投影部により生成される複数の路面投影像において複数のカメラの視野が重複する共通視野領域から、路面投影像間で互いに一致する画像パターンを抽出する。推定部は、抽出部により抽出される画像パターンの時間変化に基づいて、移動体の移動量を推定する。
(もっと読む)
姿勢推定装置および姿勢推定プログラム
【課題】人物の撮影画像から姿勢または動きを推定する際に対応するCG画像との照合の精度を高める。
【解決手段】姿勢推定装置1は、撮影画像と、当該撮影画像中の人物に対応して生成されたCG画像とを入力し、撮影画像からオブジェクトの特定領域を2値化したシルエットを抽出すると共に、CG画像から同様に特定領域を2値化したシルエットを抽出する特定領域抽出手段31と、抽出されたそれぞれのシルエットに細線化処理を施す細線化手段32と、細線化されたそれぞれのシルエットに膨張処理を施す膨張処理手段33と、膨張させたそれぞれのシルエットに距離変換を施すことで濃淡画像を生成する距離変換手段34と、それぞれの濃淡画像の特徴量としてHOGを算出する勾配特徴量抽出手段35と、撮影画像から算出されたHOGとCG画像から算出されたHOGとを照合することで、撮影画像中のオブジェクトの関節角度を推定する照合手段4とを備える。
(もっと読む)
情報処理装置、その処理方法及びプログラム
【課題】複数の周波数成分を有する画像特徴量を保持する背景モデルを用いて対象物体の検出を行なうとともに、当該複数の周波数成分毎に異なる更新度合いで背景モデルを更新するようにした技術を提供する。
【解決手段】画像を取得する画像取得手段と、当該取得した画像に対して複数の部分領域を設定し、当該部分領域各々から複数の周波数成分を含む画像特徴量を取得する特徴量取得手段と、画像特徴量を部分領域毎に保持する背景モデルにおける画像特徴量と特徴量取得手段により取得された画像特徴量とを部分領域毎に比較する比較手段と、比較手段による比較結果に基づいて、特徴量取得手段により取得された画像特徴量を用いて背景モデルに保持された画像特徴量に含まれる複数の周波数成分を各周波数成分に応じた度合いで更新する更新手段と、背景モデルを用いて部分領域毎に検出対象となる対象物体が存在する領域を検出する検出手段とを具備する。
(もっと読む)
追跡ロボット装置、追跡ロボット制御方法、追跡ロボット制御プログラム、ホモグラフィー行列取得装置、ホモグラフィー行列取得方法、およびホモグラフィー行列取得プログラム
【課題】リアルタイム性を確保し且つ安定性の高いトラッキングを行う。
【解決手段】ホモグラフィー行列取得装置30は、撮像装置11が出力する画像データを取り込む。ホモグラフィー行列取得装置30は、画像データごとに局所的ホモグラフィー行列を計算し、また、その計算レートよりも低いレートで、大域的ホモグラフィー行列を計算する。ホモグラフィー行列取得装置30は、画像データごとに、局所的ホモグラフィー行列を用いて画像データを変換し、参照画像との相関を求める。相関が高い場合は、当該画像データに対応して計算した局所的ホモグラフィー行列が読み出されるように制御する一方、相関が低い場合は、最新の大域的ホモグラフィー行列が読み出されるように制御する。ロボット制御装置45は、ホモグラフィー行列取得装置30からホモグラフィー行列データを読み込んでロボット本体12の姿勢を計算し動作を制御する。
(もっと読む)
1 - 20 / 164
[ Back to top ]