
Fターム[5L096FA60]の内容
Fターム[5L096FA60]に分類される特許
321 - 334 / 334
マスクの欠陥分類方法および分類装置

【課題】高速かつ高精度で、パターン欠陥の分類及び定量化を行うパターン欠陥分類方法およびパターン欠陥分類装置を提供する。
【解決手段】マスク(1)の製造に使用された設計データの画像と検査対象マスクの画像とを取得し、検査対象マスクのパターンの位置と検査範囲を設定し(23)、検査範囲内で設計データ画像に対するマスク画像の面積比を算出し(24)、検査対象マスクの画像のパターン円形度を算出し(27)、設計データの画像と検査対象マスクの画像の各パターンの重心座標をそれぞれ算出する(33)ことによってマスクの欠陥の種類を判断し分類する方法、およびかかる方法を実施する欠陥分類装置。
(もっと読む)
動き検出装置、動き検出方法、およびプログラム

【課題】静止系に対して運動する被写体のみを検出することができ、ビットレートを上げることが可能で、画質改善を図れる動き検出装置およびその方法を提供する。
【解決手段】連続画像の差分画像を生成し任意サイズのブロックに分割し、空間においてペアをなすブロック間の距離を算出した非類似度データに基づいてブロックペア毎にランキングを求める実空間処理回路11と、埋め込み点をランダムに配置する初期布置設定を行い、埋め込み点の位置ベクトルを規格化する規格化処理、空間内の埋め込み点間の距離を算出する非類似度定量化処理、実空間と埋め込み空間のランキング差に依存して埋め込み空間何の点群を移動する処理を行う点群移動処理と、規格化処理、非類似度定量化処理、点群移動処理を含む一連の処理を指定された回数繰り返し、点群を2つのグループに分離する検出結果抽出処理とを含む埋め込み空間処理部12とを設ける。
(もっと読む)
磁気ヘッドサスペンションの溶接位置測定方法及び装置
【課題】 基準部の基準位置からの溶接部の相対位置の測定精度を向上させることができ、また、オペレータに拘わらず、測定精度を維持でき、さらに、溶接部の測定に要する時間を短縮でき、それだけ測定作業のコストを低く抑えることができる磁気ヘッドサスペンションの溶接位置測定方法及び装置を提供する。
【解決手段】 磁気ヘッドサスペンションの溶接位置測定方法及び装置100は、溶接部P及び基準部Q1,Q2に対応する画像を含む画像情報を対応する多値画像情報に変換し、基準部Q1,Q2に対応する画像に基づいて基準画像位置(X軸及びY軸)を検出し、多値画像情報を対応する二値画像情報に変換し、該二値画像情報について溶接部Pに対応する画像以外の不要画像を除去し、該二値画像情報について基準画像位置(X軸及びY軸)からの溶接部Pに対応する画像の相対位置(X,Y)を算出する。
(もっと読む)
建造物画像検索システム
【課題】 建造物のカテゴリに属する画像の類似性を精度良く評価することのできる建造物画像検索システムを提供すること。
【解決手段】 建造物の画像の特徴量を抽出して、該特徴量をもとに比較する画像の類似度を演算する建造物画像検索システムにおいて、建造物の少なくとも色、テクスチャおよび形状に基づいて類似性のある領域を抽出し、局所領域の特徴量として保存する局所的領域抽出手段36と、局所領域を面積と形状をもとにクラスタリングして大域領域を特定し、色、テクスチャ、形状、および、大域領域と局所領域との空間関係を大域領域の特徴量として保存する大域的領域抽出手段37と、建造物の複数の原画像の前記各特徴量を保存する画像データベース61と、クエリ画像(例示画像)の各特徴量と、前記画像データベースに保存されている原画像の各特徴量とを比較して類似度の高い原画像を抽出する画像検索手段39とを備える。
(もっと読む)
画像処理による移動物体計測方法及び装置
【課題】計測誤差をより小さくする。
【解決手段】移動物体を撮像するビデオカメラ10から遠ざかる方向へ移動物体が移動するときには移動物体の略後端を代表点とし、ビデオカメラ10へ近づく方向に移動物体が移動するときには移動物体の略前端を代表点とし、代表点に関する物理量を計測する。移動物体の領域に対する相対位置を移動物体の代表点として予め定めておいてもよい。移動物体が他の移動物体と重なっていないと判定した場合には、移動物体の幾何学的重心を代表点として求め、移動物体が他の移動物体と重なっていることを検出した場合には、移動物体の動きベクトルに基づいて、重なりがないとしたときの幾何学的重心に相当する点を代表点として求めてもよい。
(もっと読む)
細胞識別装置、細胞識別方法、細胞識別用プログラム、および細胞解析装置
【課題】 撮像した細胞の画像から個々の細胞を識別すること。
【解決手段】 細胞の位相差画像に対してエッジ抽出処理を行い(ステップS20)、細胞の輪郭を得る(ステップS30)。また、核の蛍光画像を2値化した後(ステップS40)、エッジ抽出処理を行い(ステップS50)、核の輪郭を得る(ステップS60)。細胞の輪郭を抽出した位相差画像に、核の輪郭を重ねあわせる(ステップS70)。1つの細胞内に核が2つ以上存在している細胞を抽出し(ステップS80)、1つの細胞の輪郭内に1つの核が含まれるように分割し(ステップS90)、核の輪郭を1つ含む細胞の輪郭を1つの細胞と認識する(ステップS110)。
(もっと読む)
分類装置及び分類方法
【課題】精度の高い分類を行うことができる分類装置を提供する。
【解決手段】検査画像より分類対象の欠陥領域を抽出する欠陥領域抽出手段101と、領域の抽出形状が識別可能となるように表示する表示手段102と、領域が分類されるべき正解カテゴリを入力する操作手段104と、操作手段104の入力結果を基に教師データを作成する教師データ作成手段105と、教師データを基に分類を行う分類手段107とを備える。
(もっと読む)
画像解析装置,プログラム
【課題】 操作者の手を煩わせることなく、簡単なアルゴリズムにて左右の手を確実に識別する画像解析装置及びプログラムを提供する。
【解決手段】 現画像と背景画像とを比較して変化した部分を差分領域Dとして抽出し、その差分領域Dの重心G、及び差分領域Dを楕円近似することで差分領域D(即ち手を含む前腕)の向き(偏角φ),長軸半径Ra,短軸半径Rbを求める(S110〜S180)。差分領域Dが十分に扁平(Ra/Rb>Hr)である場合に、重心Gと偏角φとに基づいて、仮想肘位置Pを求め、その仮想肘位置Pから差分領域Dが左手或いは右手のいずれを撮像したものであるかを判定し、その判定結果から指先の位置を推定する(S200〜S220)。つまり、画像の細部(個々の指等)を解析することなく、左右判定を行っているため、処理量を大幅に削減でき、また、手の状態の影響を受けることなく左右の手を確実に識別できる。
(もっと読む)
補間された画像反応
摂動を受ける個体群中のオブジェクトからの反応の多次元分布を特徴付けるためのシステムおよび方法を提供する。この方法は、摂動を受けない参照個体群および摂動を受けた参照個体群から補間された「反応度」スケールの生成を可能にする。この方法は、補間された反応度スケールを使用して、所与のレベルの摂動を受ける試験化合物の反応度の定量を可能にし、試験化合物のための用量反応曲線の生成を可能にする。この方法は、製薬研究で行われているような、細胞検定および化合物のハイコンテンツスクリーニングといった広範囲の用途で有用である。 (もっと読む)
装置のダイナミック補充による、マルチクラスヒストグラム計算および処理装置での一次元/多次元パラメータの分析による特徴抽出及び認識のためのアクティヴ視覚的認知方法及び装置
本発明は、対象物の識別および局部特定ための空間解像度を変えて対象物を特徴を描写して認識するるためのアクティヴ視覚的認知方法および装置にかかわる。対象物が、デジタル信号のシーケンスおよびサブシーケンスの連続で形成され、本方法は、3以上のシーケンスにおいて、前記信号の対象物の空間解像度の時間的ガウス的に変化させる。この変化は、減少値から最適の基礎的な値への解像度の増加のフェーズを含み、その変化の間に、スムーシング効果を伴う差分を得て、差が閾値を超えたとき、ガウス的差分の変化を表わす信号を得て、更に、対象物の解析ツリーの形で表わすことができる階層的にされたガウス的差分の変化を表わす信号を得る。その変動は、機械的にか電子的なフィルタリングによって得られることができる。本発明は更に、ヒストグラム計算および処理のための動的に補充できる一次元又は多次元のマルチクラスなモジュールにかかわる。  (もっと読む)
(もっと読む)
両手動作の追跡
【課題】像一体中及び前後に両手を追跡し、ジェスチャを認識する方法を提供する。
【解決手段】像一体期間中、像が一体となった二つの手の動作を一つの単位として追跡する。像一体期間中の像が一体となった二つの手の特徴である同期のタイプを、像が一体となった二つの手の追跡された動作に基づいて検出する。検出された同期のタイプに基づいて、像が一体となった二つの手のそれぞれの移動方向が、像一体期間中に変化したかを判断する。幾つかの実施形態は、第一の方向から来た第一の手と、第二の方向から来た第二の手とが像一体期間中に像一体状態にあると判断し得る。該二つの手の特徴である検出された同期のタイプと、該二つの手の挙動とに基づいて、像一体期間後に、第一の手を、第二の手から区別できる。  (もっと読む)
(もっと読む)
有界三次元対象物の分類と空間ローカライゼーションのためのコンピュータ視覚システム
本発明は、有界三次元対象物の認識、分類、および空間ローカライゼーションのためのシステムと方法に関する。特には、対象物の認識、分類、およびローカライゼーションのためのコンピュータ化された方法に関する。本方法は、カメラにより記録された、または対象物のCAD表現を使用して構築された多数のトレーニング図に基づいて、トレーニングデータベースを生成することを含む。特徴的曲線は、トレーニング図から導出され、曲線のプリミティブが検出される。フィーチャの本質的および非本質的記述子が、対象物のクラスおよび図の姿勢状態に関するデータと共にデータベースに格納される。最終的には、認識は二段階で行われる。最初は、認識図の本質的記述子がデータベースの記述子と比較される。二番目に、最良の整合フィーチャから、どのフィーチャが、同じ姿勢状態にある同じ対象物クラスであることを示唆するという意味で、相互に一致するかが調べられる。 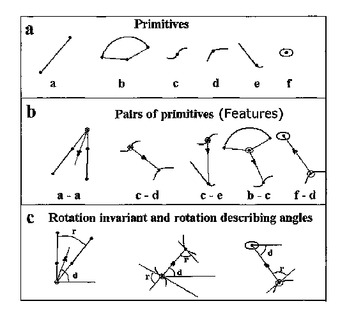 (もっと読む)
(もっと読む)
キャリブレーションチャート画像表示装置、キャリブレーション装置、キャリブレーション方法
【課題】カメラによるキャリブレーションシートの撮影が容易に行えるキャリブレーションチャート表示装置を提供すること。
【解決手段】所定のキャリブレーション撮影方向から撮影されたキャリブレーションチャート1の画像を記憶する校正画像記憶部59と、校正画像記憶部59に記憶されたキャリブレーションチャート画像を、前記キャリブレーション撮影方向と所定の画像回転角度に応じて表示するキャリブレーションチャート画像表示部61とを備えている。
(もっと読む)
光学端末装置、画像処理方法およびシステム
【課題】手ぶれによる画像の歪みを解消し、完全なイメージデータを取得することによって、文字認識を確実に実行できるようにするとともに、取込んだイメージデータに対する文字認識を端末あるいは携帯端末以外の装置において実行し、その認識結果をアプリケーション等で文字認識を行ってデータを所望の制御部に入力することを可能とした光学的文字認識装置およびシステムを提供すること。
【解決手段】マウス機能と連動しており、書類上に書かれた関心のある個所のイメージのみを取り込め、文字やコードの認識はアプリケーションの背後で行うことができ、その認識結果はアプリケーション上の予め希望した場所へ直接入力される。スキャナ・モジュールは、マウスや携帯電話に組み込むことができ、インターネットを利用した様々な応用が考えられる。
(もっと読む)
321 - 334 / 334
[ Back to top ]