
Fターム[5L096FA60]の内容
Fターム[5L096FA60]に分類される特許
121 - 140 / 334
追尾点検出装置および方法、プログラム、並びに記録媒体

【課題】所望の追尾対象を簡単かつ確実に追尾させることができるようにする。
【解決手段】階層化部103は、入力画像のフレーム間隔の間引きなどの処理を施し、画像F1と画像F2を出力する。第1階層動き検出部104は、画像F1において、追尾点の座標が指定されているフレームの画像と、時間的に後のフレームの画像との間で追尾点の動きを検出し、時間的に後のフレームの画像における追尾点の座標を特定し、それらの座標の情報をX1、Y1として出力する。第2階層動き検出部105は、X1、Y1に基づいて、フレーム間隔が間引かれる前の画像に対して順方向動き検出と逆方向動き検出を行い、ブロック位置決定部114が、フレーム間隔が間引かれる前の画像の各フレームにおける追尾点の座標を決定する。
(もっと読む)
画像追尾装置,画像追尾処理方法および画像追尾処理プログラム

【課題】 面積重心追尾方式による画像追尾処理において目標抽出処理の精度を向上させる。
【解決手段】 画像追尾装置1において,目標らしさ算出手段15は,画像取得手段11の画像から追尾目標を含むゲート内画像を抽出し,ゲート内画像の中心部および周辺部の濃度ヒストグラムから各濃度値の度数を算出し,各濃度値における目標らしさを算出する。画像2値化手段16は,目標らしさが所定値以上の濃度値を目標とする2値化テーブルを生成してゲート内画像を2値化処理する。面積重心算出手段17は,目標の2値化画像の面積重心を,目標らしさを考慮して算出し,追尾点とする。追尾誤差算出手段13は,追尾点と画像取得手段11の視軸との追尾誤差を算出し,指向手段14は,追尾誤差をもとに画像取得手段11の指向を制御する。
(もっと読む)
動作解析装置、動作解析方法、プログラムおよび記録媒体
【課題】複数の試技の平均データを分かり易く表示できるとともに、当該一連の動作中の注目動作ポイントのデータが変容しないような装置を実現する。
【解決手段】動作解析装置1の制御部13は、パラメータデータが経過時間に従って並べられた時系列データの中から、注目動作ポイントに対応する注目パラメータデータを特定し、当該注目パラメータデータを区切り位置として複数の区分に分割し、区分ごとに、各試技についてのパラメータデータの数の割合の全試技の平均値を基準割合として設定し、当該基準割合および各区分の最大データ数に基づいて、基準データ数を設定する。そして、制御部13は、各試技の時系列データについて、各区分のパラメータデータの数が当該区分に対して設定した基準データ数になるようにデータ変換し、平均値を求める。そして、当該平均値に基づいて、パラメータの時間的変化を示す画面をディスプレイ12に表示させる。
(もっと読む)
レーンマーカ認識装置、車両、及びレーンマーカ認識用プログラム
【課題】道路上に離散的に設けられた鋲型のレーンマーカの認識精度を向上させることができるレーンマーカ認識装置を提供する。
【解決手段】道路画像から、道路上に離散的に設けられた鋲型のレーンマーカを認識するレーンマーカ認識装置1において、道路画像からレーンマーカの画像部分である可能性がある領域をレーンマーカ候補領域として抽出する候補領域抽出手段12と、各レーンマーカ候補領域の代表点を所定条件に従って決定し、該代表点に対応する実空間位置を、実空間代表点として算出する実空間代表点算出手段13と、実空間代表点のうち、相対距離が前記レーンマーカの規定に応じて設定された所定範囲内である実空間代表点を、1つのグループとするグループ化手段14と、グループ化手段14により1つのグループとされた実空間候補点に基づいて、レーンマーカの位置を認識するレーンマーカ位置認識手段17とを備える。
(もっと読む)
表情認識装置、撮像装置、方法及びプログラム
【課題】
眼や口などのパーツが似たような形状となっている場合であっても、表情を正確に認識できるようにした表情認識装置、撮像装置、方法及びプログラムを提供する。
【解決手段】
表情認識装置10は、入力された画像から人物の顔画像を検出し、当該検出した顔画像から表情毎に対応した表情評価値を算出し、当該算出された表情評価値と、表情評価値に対応して設けられた表情判定用閾値との関係を顔画像に基づき更新するとともに、当該更新された表情評価値と表情判定用閾値との関係に基づき顔画像の表情を判定する。
(もっと読む)
眼開閉判別装置、及びプログラム
【課題】正確に眼の開閉を判別できる眼開閉判別装置及びプログラムを提供する。
【解決手段】眼開閉判別装置50は、カメラ10とコンピュータ14とを備え、コンピュータ14は、カメラ10が取得した顔画像より上瞼を検出し、検出した上瞼に基づいて、下瞼が含まれる下瞼探索領域を決定し、下瞼探索領域を上から下に走査して、輝度が暗から明に変化するエッジの群を下瞼候補として検出し、検出したエッジの群の信頼度を算出し、算出した信頼度に基づいてエッジの群を下瞼として判別し、上瞼と下瞼との位置に基づいて眼の開度を算出し、算出した眼の開度に基づいて、眼の開閉を判別する。
(もっと読む)
メッシュ衝突回避
本発明は、モデルベースの画像セグメント化を用いて画像データにおける対象物をセグメント化するシステム100に関する。このシステムは、メッシュの現在の位置に基づき上記メッシュの外部エネルギーを計算するため、上記画像データにおける特徴を特定する特徴ユニット120を有する。この特徴ユニット120は更に、上記画像データにおいて特定される上記特徴に含まれることになる特徴を特定するため、上記画像データにおける複数の候補特徴を選ぶ候補特徴ユニット122と、上記画像データの領域に対する上記複数の候補特徴の各候補特徴の位置を決定する位置ユニット124と、各候補特徴の強度を計算する特徴関数ユニットであって、上記各候補特徴の強度が、上記領域に対する上記各候補特徴の位置に依存する、特徴関数ユニット126と、上記複数の候補特徴の各候補特徴を評価し、上記評価に基づき上記複数の候補特徴における上記特徴を特定する評価ユニット128とを有する。回避されるべきである上記領域内部に、例えば、上記画像データにおける別の対象物に対して適合される別のメッシュ内部に、選ばれた候補特徴が配置されるかどうかを決定すると、上記各特徴の強度の上記計算の間、及び従って上記複数の候補特徴の上記評価の間、この候補特徴に罰を科すことが可能になる。 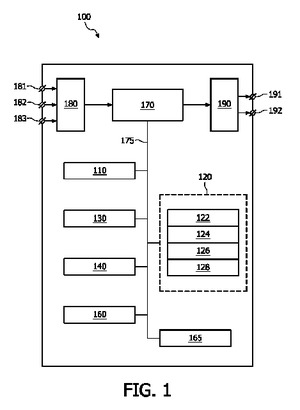 (もっと読む)
(もっと読む)
操作者判別装置
【課題】車載装置を操作する操作者が、運転者か、同乗者かを判別することができる操作者判別装置を提供する。
【解決手段】操作者判別装置3は、パターン130を有するアームレスト13と、操作者の腕を介してパターン130を撮像可能に設けられた近赤外線カメラ31と、近赤外線カメラ31によって撮像された画像300と、パターン130を構成する基本パターン131に基づいて基本パターン131の検出を行う検出部32aと、パターン130の検出・未検出に基づいて2値化処理を行って2値画像301を作成する2値化処理部32bと、2値画像301に基づいてラベリング処理を行って第1及び第2の連結成分20a、20bを抽出し、第1及び第2の連結成分20a、20bの重心の位置に基づいて前記操作者が運転者2Aであるか、同乗者2Bであるかを判別する判別部32cとを有する画像処理部32と、を備えている。
(もっと読む)
移動物体追跡装置
【課題】移動物体の見え方が変化しても誤った対応付けが発生しにくくする。
【解決手段】移動物体追跡装置は、監視空間を順次撮像して監視画像を出力する撮像手段と、前後する時刻に監視画像から抽出された移動物体の位置から当該移動物体の移動方向を算出する方向算出手段と、各時刻における移動物体の位置及び前記移動方向に基づき、当該時刻における撮像手段から当該移動物体への視点を判定する視点判定手段と、過去に抽出された特徴量を、視点判定手段により判定された当該時刻における前記視点ごとに記憶する視点別特徴量記憶手段と、視点判定手段により判定された現時刻における視点に応じた特徴量を視点別特徴量記憶手段から取得する特徴量取得手段と、特徴量取得手段が取得した特徴量と特徴量抽出手段が抽出した特徴量とを比較して監視画像から抽出した物体像を当該移動物体に対応付ける対応付け手段とを備える。
(もっと読む)
空間移動量算出装置及びその方法
【課題】空間中を運動している物体の空間移動量を安定に推定する。
【解決手段】物体の移動前の追跡対象領域内の特徴点群1の画像位置と空間位置と特徴量を入力する入力部10と、物体の移動後の追跡対象を含む領域内の特徴点群の画像位置と空間位置と特徴量を入力する入力部11と、入力された特徴点群1と特徴点群2の間の画像位置関係から第1の類似度を算出する画像位置関係算出部12と、空間位置関係から第2の類似度を算出する空間位置関係算出部13と、特徴量関係から第3の類似度を算出する特徴量関係算出部14と、第1の類似度〜第3の類似度を統合する統合部15と、統合部15から空間移動量を推定する空間移動量算出部16と、空間移動量を出力する出力部17とを備えている。
(もっと読む)
コンテンツ識別装置
【課題】任意の未知コンテンツが公序良俗に反するものであるか否かを、採光条件等にかかわらず自動的かつ画一的に識別できるコンテンツ識別装置を提供する。
【解決手段】色補正部11は、未知コンテンツ画像1および教師画像2の色を補正する。教師画像2は、識別対象と同系列の正例教師画像2aおよび異系列の負例教師画像2bとに区別されている。最頻色判別部111は、未知コンテンツ画像1および教師画像2の最頻色を判別する。色相変換規則設定部112は、未知コンテンツ画像1および教師画像2の各最頻色を、識別対象の最頻色に関する標準的な色相である最頻標準色に変換する規則を設定する。色変換部113は、未知コンテンツ画像1および教師画像2の全域を前記変換式で色変換する。
(もっと読む)
特徴点位置決定方法及び装置
【課題】簡単な処理で複数の特徴点位置を高精度に決定可能とする。
【解決手段】画像中の特徴点の位置を決定する特徴点位置決定方法では、画像中の複数の特徴点の位置を予め設定された探索範囲で第1の探索を行い、探索された複数の特徴点の幾何学的な配置関係に基づいて当該複数の特徴点の位置を補正し、補正された各特徴点の位置に基づいて探索範囲を設定して当該探索範囲で各特徴点の位置を探索する第2の探索を行う。そして、第2の探索で探索された各特徴点について位置の信頼性を判定することにより、上記補正された位置と、上記第2の探索で探索された位置とのいずれかを選択する。
(もっと読む)
移動物体追跡装置、移動物体追跡方法及びプログラム
【課題】 複雑な動きをする物体を正しく追尾する。
【解決手段】 現時刻tにおいて入力画像から対象物の領域の代表点を抽出する抽出手段と、時刻t−1までの代表点列群に対し、各代表点列に対応する(つながる)現時刻の代表点を統合して、その代表点列の特徴量を成長させる成長手段と、前記成長手段において、成長に寄与しなかった代表点に対し、その代表点を出発点とする新たな代表点列を発生させる発生手段と、前記成長手段において、どの代表点とも対応せず成長が行われなかった代表点列に対して、特徴量の逓減を行う逓減手段と、を備える。
(もっと読む)
目標物検出システム
【課題】 用いるテンプレート画像を極力少なくして、衛星画像等の探索対象とする画像から目標物を検出することが可能な目標物検出システムを提供する。
【解決手段】 サンプル画像上で、目標物として検出したい対象物を指定すると、指定された位置に対応するサンプル画像上から、テンプレート画像と同形状の画素ブロックを抽出し、テンプレート画像および画素ブロックを用いて所定の類似性評価値を算出する。所定の類似性評価値が最小値または最大値をとるサンプル画像上の画素位置を特定し、当該画素位置に対応する画素ブロック(a)を用いてテンプレート画像(b)上の画素を置き換え、得られた合成画像(c)でテンプレート画像を更新する。
(もっと読む)
商品関心度計測装置
【課題】画像処理によって個々の商品に対する買い物客の関心度の高さ、分布及び経時変化等を定量的に把握できる装置を提供する。
【解決手段】画像処理技術によって撮像画像上で個人の移動を追跡し、商品の至近距離の範囲内として設定された領域内での滞在時間を計測する画像処理装置を有し、商品に対する買い物客個々の関心度を数段階に判別する装置を有し、当該関心度合い別データ記憶装置に登録された関心度合い別データを加工するデータ加工処理装置を有し、上記画像処理装置は、人物画像の概略的な輪郭を法線ベクトルで認識し、経時的に追跡する人認識手段を含み、上記関心度合い判別装置における判別基準は、瞬間移動速度と比較する速度基準を有し、上記速度基準が停止状態に近い遅い移動速度以下に設定されていて、上記瞬間移動速度がこの速度基準に当たるときに限り、上記滞在時間の長短によって関心度が判別されるように構成されている。
(もっと読む)
目標物検出システム
【課題】 目標物を含んだテンプレート画像を用いて、衛星画像等の探索対象とする画像から目標物を抽出する際に、テンプレート画像と目標物が類似しているかどうかを判定する判定基準値の設定を適切に行うことが可能な目標物検出システムを提供する。
【解決手段】 サンプル画像上で、目標物として検出したい対象物を指定すると、指定された位置に対応するサンプル画像上から、テンプレート画像と同形状の画素ブロックを抽出し、その画素ブロックとテンプレート画像両者について、輝度ヒストグラムの照合(S201)、階調変動ヒストグラムの照合(S202)、重心間距離の算出(S203)、慣性モーメントの照合(S204)、グレー階調画素差分の算出(S205)、正規化相関係数の算出(S206)を実行し、6つの類似性評価値の値を更新する。指定された位置付近の所定の位置についても実行し、6つの類似性評価値の最小または最大値に基づいて、判定基準値を設定する。
(もっと読む)
輪郭検出方法、輪郭検出装置および輪郭検出プログラム
【課題】高精度かつ処理負荷の少ない輪郭検出を行う。
【解決手段】左目の輪郭が検出できると、最終的に探索された輪郭パラメータL,R,T,BをRAM12に記憶し、引き続き右目の輪郭検出を実行する。パラメータ探索部P2c5は、右目のZマップにおいて目の輪郭パラメータL,R,T,Bを初期設定する。ここでは、RAM12から左目の輪郭を示す輪郭パラメータL,R,T,Bの座標を読み出し、右目の輪郭線Oが左目の輪郭線Oに対して、中央の鉛直線に関し左右対称となるように右目の輪郭パラメータL,R,T,Bを初期設定する。
(もっと読む)
マーカ検出識別装置およびそのプログラム
【課題】撮像された映像をマーカが妨害することなく、かつ、精度よくマーカを検出・識別することが可能なマーカ検出識別装置を提供する。
【解決手段】マーカ検出識別装置3は、不可視マーカごとに、当該不可視マーカが配置されている位置の近傍領域における色特徴量を予め記憶する記憶手段31と、不可視光撮像系で撮像した不可視光画像において、予め定めた輝度値を閾値として不可視マーカを検出するマーカ検出手段34と、マーカ検出手段34で検出された不可視マーカの位置に対応する可視光撮像系で撮像された可視光画像の位置の近傍領域における色特徴量を生成する検出マーカ色情報生成手段35と、検出マーカ色情報生成手段35で生成された色特徴量と、記憶手段31に記憶されている色特徴量との類似の度合に基づいて、不可視マーカを個別に識別するマーカ識別手段36と、を備える。
(もっと読む)
デジタル画像における顔の表情の検出
デジタル画像とアプリケーションにおける顔の表情を検出する方法及びシステムがひいては開示される。デジタル画像の分析は、人の顔において笑顔及び/又は瞬きが存在するか否かを判定する。顔認識及び/又は姿勢または照明状態の判定は、特定の、相対的に小さな分類器カスケードの適用を可能にする。 (もっと読む)
画像データ処理装置及びプログラム
【課題】撮像対象の移動体を正確に追尾する技術を実現する。
【解決手段】追尾対象画像生成部3が、一定周期で移動体の撮像画像を含む観測画像を入力し、移動体の撮像画像が表示されていると予測される予測画像を入力し、予測画像に基づき観測画像を解析し、観測画像において移動体の撮像画像が表示されている追尾対象画像を推定する。重心速度推定部5は、追尾対象画像に基づき移動体の移動速度を推定し、次の周期の次周期観測画像において移動体の撮像画像の重心位置に対応する画素を次周期重心画素として予測する。追尾対象画像予測部4は、飛行体の推定移動速度と、追尾対象画像のサイズと次の周期までの残存時間に基づき、次周期観測画像における移動体の撮像画像のサイズを次周期画像サイズとして算出し、次周期画像サイズと次周期重心画素に基づき、次周期の予測画像を算出し、追尾対象画像生成部3に通知する。
(もっと読む)
121 - 140 / 334
[ Back to top ]