
Fターム[5L096FA60]の内容
Fターム[5L096FA60]に分類される特許
61 - 80 / 334
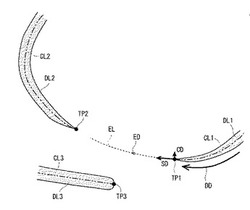
線画処理装置、線画処理方法およびプログラム
【課題】描画線に基づいた領域分離を高精度に実施することを容易とする技術を提供する。
【解決手段】線画処理装置100は、線画から芯線CL1を抽出する芯線抽出部21と、芯線CL1の端点TP1を抽出する端点抽出部22と、端点TP1から延長線ELを延伸させる延伸方向EDとして、前記端点まで続く芯線CL1の描画方向DDに基づいて、端点TP1から射出させる射出方向SDと、射出方向SDに射出された延長線EDを所定方向に湾曲させる湾曲方向CDとを決定する延伸方向決定部24とを備える。
(もっと読む)
撮影画像における物体座標の対応付け方法、対応付け装置

【課題】1対の撮影画像の各々の座標において、正確な対応付けを行なう際において、作業時間をより短縮できる対応付け方法及び装置を提供することを目的とする。
【解決手段】本発明の対応付け方法は、複数台のカメラで得られた一対の撮影画像間の特徴情報を抽出する第1のステップと、一方の撮影画像から得られた複数個の特徴情報に対して、他方の撮影画像から得られた複数個の特徴情報を対応付ける第2のステップと、前記対応付けられた特徴情報間の視差を示す情報を取得する第3のステップと、前記取得した視差を示す情報に基づく分布を生成する第4のステップと、前記生成した分布に基づいて、視差を示す情報を複数の集団に分離する第5のステップと、前記集団に含まれるデータ数に基づいて、前記集団の良否を判別する第6のステップと、を備える。
(もっと読む)
撮像装置およびその制御方法
【課題】低いコントラストの動体であっても,正確に動体領域を検出できるようにする。
【解決手段】撮像によって得られた複数のフレーム画像のうち,先に出力された2つのフレーム画像1,2の差分が算出され,かつそれよりも後に出力された2つのフレーム画像7,8の差分が算出される。差分画像SFに含まれる差異画像部分SF1,SF2と,差分画像SLに含まれる差異画像部分SL1,SL2とに包含される包含領域が動体領域として検出される。
(もっと読む)
対象物認識システム及び該システムを利用する監視システム、見守りシステム
【課題】セグメンテイション及び位置推定精度の向上を図ることができ、結果として姿勢・動作の認識精度も向上し、より信頼性の高い異常事態発生の検知が可能な対象物の認識システム、監視システム、見守りシステムを提供する。
【解決手段】本発明の対象物の認識システムは、対象物の1次元データを取得する1次元センサーと、対象物の2次元データを取得する2次元センサーと、対象物の3次元データを取得する3次元センサーの少なくとも2つ以上を含む同種又は異種の複数の観測手段と、上記観測手段から得られる1次元データ、2次元データ、3次元データを対応付けて対象物を認識する認識手段を備える。
(もっと読む)
ジェスチャ認識装置、ジェスチャ認識装置の制御方法、および、制御プログラム
【課題】特殊な手段を用いず、ユーザにとって自然な操作かつ装置にとって低負荷処理で、ジェスチャの開始と終了とをジェスチャ認識装置に正しく認識させる。
【解決手段】動画に写る認識対象物の動作からジェスチャを認識する、本発明のジェスチャ認識装置100は、動画に写る特定の特徴を有する特定被写体(掌など)を検出する重心追跡部11と、特定被写体の単位時間あたりの移動速度を算出する移動速度判定部12と、特定被写体の移動パターンを抽出する移動パターン抽出部13と、移動速度と移動パターンとが予め定められた条件を満たす場合に、特定被写体の動きを、自装置に対して入力された指示(ジェスチャ認識処理の開始または終了の指示など)として識別する開始終了判断部14とを備えていることを特徴としている。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、及びプログラム
【課題】距離画像の欠損領域(無効領域)を特徴として利用した、対象物体の3次元位置姿勢の推定を可能にすることを目的とする。
【解決手段】3次元形状が既知である対象物体の3次元の位置姿勢を計測する位置姿勢計測装置であって、対象物体までの距離情報が画素値として保持された距離画像を撮像する撮像部と、距離画像から、撮像部と対象物体との距離情報が取得できない領域である無効領域を選別する選別部と、無効領域の特徴を示す特徴量を抽出する抽出部と、距離画像を撮像した時の撮像部と対象物体との相対的な位置姿勢を示す情報と、撮像部により複数の異なる方向から撮像された距離画像ごとの特徴量とを関連付けて記憶する記憶部と、抽出部により抽出された特徴量に対応する記憶部に記憶された特徴量を求めて、当該求められた特徴量と関連付けられた位置姿勢を示す情報から対象物体の3次元の概略位置姿勢を決定するする概略位置姿勢決定部と、を備える。
(もっと読む)
コンピュータ入力画像中のマーカ認識においてトポロジカルな領域の隣接性とGeometricHashing法を併用するマーカ認識方法
【課題】入力画像中のマーカ認識において以下の(イ)〜(ハ)の問題を解決する。
(イ)既存のトポロジー情報によるマーカ認識手法において同一トポロジー構造だが別図像のマーカ間の区別ができない
(ロ)既存のトポロジー情報によるマーカ認識手法において6自由度の姿勢推定ができない
(ハ)GEOMETRIC HASHING法において、試行すべき基底の数が多いとメモリ使用量や計算量が増大する
【解決手段】 既存のトポロジーによる方法では出来なかった同一トポロジー構造だが別図像のマーカ間の区別と、3次元空間内での姿勢推定を、トポロジー情報とマーカ各領域の重心を使用しGEOMETRIC HASHING法を適用して可能にする。また、GEOMETRIC HASHING法の際にトポロジー情報を併用し基底を選択することで、メモリ使用量や計算量を減少させる。
(もっと読む)
パンの識別装置とそのプログラム
【課題】 画像認識によりパンの種類を正確に識別する。
【構成】 パンのカラー画像を内側領域のカラー画像と外側領域のカラー画像とに分割する。パンの画像からパンの輪郭に関する特徴量と、パンのテクスチャーに関する特徴量と、パンの内側領域のカラースペース内での特徴量と、パンの外側領域のカラースペース内での特徴量とを求め、パンの種類を識別する。
(もっと読む)
画像計測装置、画像計測方法および画像計測プログラム
【課題】課題ごとに免疫機構や進化の仕組みを設計することなく、精度の高い画像計測を実行する画像計測装置等を提供する。
【解決手段】画像計測装置1は、免疫記憶データベース25を参照し、処理対象の画像の現在の状態に対して動作条件を満たす抗体を実行する(ステップ12)。免疫記憶データベース25は、各種の画像処理を実行する動作条件、各種の画像処理を実行することによって得られる効果の期待値、各種の画像処理に対応する抗体プログラムの所在を含む免疫記憶情報を保持する。次に、画像計測装置1は、抗体プログラム27の実行結果に基づいて、計測対象の状態を更新し(ステップ13)、計測対象が現在の状態で終了条件を満たすかどうか等の評価を行う(ステップ14)。終了条件を満たす場合(ステップ14のYes)、計測対象の現在の状態の中から最適な解を決定し(ステップ15)、目的とする画像計測を実行する(ステップ16)。
(もっと読む)
車両周辺監視装置
【課題】そこで、本発明は、眼鏡を掛けた歩行者や帽子を被った歩行者について、歩行者であることの判定ができなくなることを抑制した車両周辺監視装置を提供する。
【解決手段】赤外線カメラの撮像画像のグレースケール画像を2値化処理して生成された2値画像から、処理対象画像部分を抽出する2値画像候補抽出手段20と、処理対象画像部分が歩行者の頭部の特徴を有するか否かを判断して、処理対象画像部分に対応する実空上の物体が歩行者であるか否かを識別する歩行者識別手段21とを備え、歩行者識別手段20は、所定範囲内の間隔をもって垂直方向に対向した二つの処理対象画像部分75,76が抽出されたときには、該間隔部分を埋めて該二つの画像部分を一体化した画像部分について歩行者の頭部の特徴を有するか否かを判断して、該二つの画像部分に対応する実空間上の物体が歩行者であるか否かを識別する。
(もっと読む)
物体識別装置、物体識別方法、および物体識別プログラム
【課題】特徴点が抽出しにくい画像においても高い認識精度を得ることが可能な物体識別装置、物体識別方法、および物体識別プログラムを提供することを課題としている。
【解決手段】物体識別装置1は、外部設定値取り込み部11と、画像データ取り込み部12と、背景画像記憶部13と、背景差分処理部14と、平滑化部15と、二値化部16と、輪郭抽出部17と、重心算出部18と、内輪郭抽出部19と、極座標値生成部20と、識別部21と、極座標値記憶部22と、識別結果出力部23とを備える。また、物体識別装置1には、カメラ2と、画像表示装置3が接続されている。
(もっと読む)
追跡方法
本発明は、フレーム・シーケンス内の少なくとも1つの物体を追跡する方法であって、各フレームが画素アレイを有し、深さ値が各画素に関連付けられている方法に関する。この方法は、各フレームの前記画素の少なくともいくつかを複数の領域にグループ分けするステップと、前記領域を、相互接続された領域のクラスタB1,…,B5にグループ分けするステップと、2次元投影で別のクラスタB1に隣接する少なくとも1つのクラスタB2,…,B5が前記別のクラスタB1の深さ値よりも高い深さ値を有する場合に、少なくとも1つのクラスタB2,…,B5が前記別のクラスタB1によって部分的に遮蔽されている物体に属すると判断するステップを含む。 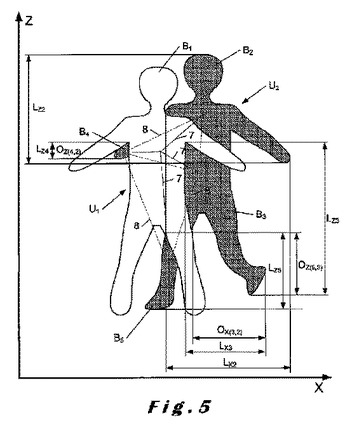 (もっと読む)
(もっと読む)
人物行動判定装置及びそのプログラム
【課題】本発明は、映像処理のみで、混雑したシーンに含まれる人物の行動を判定できる人物行動判定装置を提供することを目的とする。
【解決手段】人物行動判定装置1は、映像に含まれる1以上の人物領域を所定のフレーム間隔で機械学習により検出する人物領域検出手段10と、人物領域毎に特徴量を算出すると共に、複数のフレーム画像において人物領域の特徴量が類似する人物領域を同一人物の人物領域と判定し、同一人物の人物領域の重心位置を連結して人物軌跡を生成する人物軌跡生成手段20と、人物軌跡毎に特徴量を算出すると共に、人物軌跡の特徴量が行動条件を満たすか否かを判定し、人物軌跡の特徴量が行動条件を満たすときは、人物が行動条件に対応する行動を行っていると判定する人物行動判定手段30と、を備える。
(もっと読む)
リアルタイムハンド追跡、ポーズ分類、及びインタフェース制御
カメラ入力からのハンド動作は、消費者電子デバイスの画像処理モジュールを使用して検出される。検出したハンド動作は、ハンド動作の語彙から識別される。電子デバイスは、識別したハンド動作に応答して制御される。この要約は、他の実施形態が本要約で説明した特徴から逸れる場合があるので制限と考えないものとする。 (もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】他の領域と特徴の似ている画像領域であっても、当該画像領域における正しいオブジェクトの識別を行えるようにする。
【解決手段】特徴量算出部113では、画像分割部112で分割された画像の各領域から特徴量を算出し、対応付け手段(114及び115)では、当該特徴量に基づいて各領域に1又は複数のオブジェクトを対応付ける。そして、オブジェクト選択部116では、対応付け手段により1つの領域に対して複数のオブジェクトが対応付けられた場合、当該1つの領域に対応付けられた各オブジェクトへの帰属確率と、当該1つの領域の近傍に位置する近傍領域に係る近傍領域情報とに基づいて、複数のオブジェクトの中から1つのオブジェクトを選択して当該1つの領域に対応付ける。そして、領域統合部117では、画像において同じ種類のオブジェクトが対応付けられた領域を統合する。
(もっと読む)
動画像被写体運動表示装置および動画像被写体運動表示用プログラム
【課題】映像中において回転等を含む人体や物体の動きを表現する矢印形状の付加情報を生成し,映像に合成して表示することにより,人体や物体の動きをわかりやすくする。
【解決手段】動物体領域抽出部20は,映像中で動く動物体(被写体)の領域を抽出する。動物体運動抽出部30は,領域の形状変化の有無および領域内の特徴点の軌跡により,動物体の重心の並進運動と,動物体の回転運動の有無および回転の軸を推定する。矢印形状決定部50は,運動の移動量または変化量に対応する形状/大きさを持つ矢印形状の付加情報を生成し,それをもとに,矢印形状合成部60は,被写体の像に重畳して,並進や回転の動きを示す矢印の表示データを生成する。
(もっと読む)
ジェスチャ認識装置、ジェスチャ認識方法、およびジェスチャ認識プログラム
【課題】カメラにより得られる画像を利用してジェスチャを安定して認識する。
【解決手段】対象物の移動軌跡に基づいてジェスチャを認識するジェスチャ認識装置は、異なる時刻に得られる複数の画像フレームにおいて、それぞれ、前記対象物に対応する対象領域を抽出する対象領域抽出部と、前記複数の画像フレームにおいて、それぞれ、前記対象領域の中から着目点を抽出する着目点抽出部と、前記複数の画像フレームにおいて、それぞれ、前記着目点の移動方向に基づいて前記対象領域の移動方向を判定する移動方向判定部と、前記複数の画像フレームについての前記移動方向判定部の判定結果を時系列に並べることにより得られる遷移データに基づいて、前記対象物の移動軌跡を検出する移動軌跡検出部、を有する。
(もっと読む)
画像探索方法
【課題】高速且つ精度良く対象物を探索する。
【解決手段】二つの特徴点からなる基底ペアの始点となる特徴点を中心して輪郭線の境界追跡を行い、輪郭線に沿った各位置でのエッジ勾配ベクトルの方向の差が規定範囲以下となる安定区間を探す工程と、安定区間と基底ペアの始点との相対位置関係と、安定区間のエッジ勾配ベクトルと基底ベクトルの相対角度と、基底ペアの始点と終点の相対位置関係とを含む基底ペア情報を求める工程と、被探索画像の各特徴点を基底ペアの始点と仮定し、基底ペア情報に基づいて、基底ペア終点の被探索画像上での座標位置を予測する工程と、予測される基底ペアの終点の座標位置に基づいて基底ペアの終点に該当する特徴点を探索する工程と、基底ペアの終点の探索結果に基づいて、基底ペアの始点と見なして被探索画像の各特徴点と基準座標点群との照合を行う特徴点の絞り込みを行う。
(もっと読む)
マーカー検知装置及びマーカー検知装置用プログラム
【課題】 撮像画像から予め定めたマーカー画像を認識し、マーカーを検知する際、小さい処理負荷で迅速に検知を行えるようにする。
【解決手段】 マーカーは4つの三角形をマーカー要素とし、近接配置した同一三角形の要素(A,A’)よりなる第1要素ペアP1と異なる同一三角形の要素(B,B’)よりなる第2要素ペアP2を図1(B)のように組み合わせて構成する。ペアP1とペアP2の位置関係は、図1(C)のようにペアP1の三角形(A,A’)それぞれの重心を結ぶ直線Cと、ペアP2の三角形(B,B’)それぞれの重心を結ぶ直線Dが所定の角度で交差するように配置する。撮影画像から白領域の形状パラメータ(円形度)を算出するという簡単な処理で要素を認識し、要素間の単純な関係を求めることでマーカーを検知することができる。
(もっと読む)
画像処理システム及びプログラム
【課題】被写体の位置や向きが変化しても、被写体に同じ座標系を設定する。
【解決手段】画像処理システム1は、被写体を撮像した撮像画像を取得し、取得される撮像画像において被写体が写し出された被写体撮像領域に外接する最小の矩形領域を設定し、設定された最小の矩形領域と被写体撮像領域との関係に基づいて、最小の矩形領域に基づく座標系を被写体に対して設定する。
(もっと読む)
61 - 80 / 334
[ Back to top ]