
Fターム[5L096FA60]の内容
Fターム[5L096FA60]に分類される特許
21 - 40 / 334
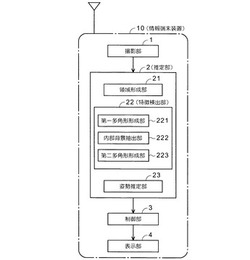
情報端末装置
【課題】特別なセンサ等を用いることなく、撮像部に対する被写体の空間的な動作によって表示部の情報を制御できる情報端末装置を提供する。
【解決手段】撮影画像より色特徴に基づいて被写体領域を抽出する領域形成部21、被写体領域を包含する第一の外接多角形を形成する第一多角形形成部221、第一の外接多角形の内部より被写体領域を排除した内部背景領域を抽出する内部背景抽出部222、内部背景領域を包含する第二の外接多角形を形成する第二多角形形成部223、第一の外接多角形、内部背景領域及び第二の外接多角形に基づいて、被写体の撮影部1に対する位置及び姿勢を推定する姿勢推定部23及び、推定された位置及び姿勢に基づいて表示部3を制御する制御部4を備えて情報端末装置10を提供する。
(もっと読む)
第1の図形と第2の図形との間の位置関係を決定する方法、そのような方法を用いる装置、そのような方法のプログラム及び自動車運転模擬装置

【課題】2つの図形の位置関係を容易に決定できる方法を提供する。
【解決手段】本明細書に開示する自動車運転模擬装置10は、文字盤図形20の座標データ及び数字図形21a〜21rの座標データを入力する入力部10dと、入力した文字盤図形20の座標データから文字盤図形20の重心Cの第1重心座標を求め、且つ、入力した数字図形21a〜21rの座標データからこれらの数字図形21a〜21rの重心の第2重心座標を求め、且つ、第1重心座標及び第2重心座標に基づいて、文字盤図形20と数字図形21a〜21rとの間の位置関係を決定する演算部10aとを、備える。
(もっと読む)
画像認識装置、画像認識方法及びプログラム
【課題】スケール変化、回転変化、部分隠れがある物体に対して、物体表面の絵柄の有無にかかわらず、物体認識を可能にする
【解決手段】実施形態によれば、取得部と、第1の抽出部と、第2の抽出部と、基準データ記憶部と、認識処理部とを備える。取得部は、対象物体の画像を取得する。第1の抽出部は、対象物体の画像の輪郭線における曲率極値点を抽出する。第2の抽出部は、各々の極値点ごとに、当該極値点と当該極値点に係る曲率半径中心と輪郭線に基づく局所的な特徴ベクトルを抽出する。基準データ記憶部は、基準となる物体の画像に係る各々の極値点ごとに求められた、当該極値点に係る特徴ベクトルを少なくとも記憶する。認識処理部は、対象物体の画像に係る各々の極値点ごとに、当該極値点に係る特徴ベクトルを、基準となる物体の画像に係る特徴ベクトルと照合して、対象物体の画像に係る極値点と、基準となる物体の画像に係る極値点とを対応付ける。
(もっと読む)
物体認識装置、物体認識方法、学習装置、学習方法、プログラム、および情報処理システム
【課題】対象物体の姿勢に対応した信頼度の高い領域組からの投票を重視することで、対象物体を精度よく認識する。
【解決手段】対象物体を検出する検出器の学習方法は、対象物体の既知の三次元モデルから複数の特定領域を選択する選択工程と、選択工程で選択された特定領域を検出する検出器の学習を行う学習工程と、学習工程で学習された検出器により複数の特定領域のうち所定の領域の位置および姿勢の認識処理を行う評価工程と、評価工程における認識処理の結果の認識精度に従って、検出器の出力に対する投票重みを設定する正規化工程とを有する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】非接触で、かつ、容易に手の回転動作により入力情報を入力できるようにする。
【解決手段】指先位置計算部63は、画像内に含まれる手の指先の座標位置を取得する。回転方向特定部145、および回転速度計算部146は、それぞれ画像を所定の指先の回転動作の中心として設定される中心位置を基準として、設定される回転角度に応じて、画像を放射状に複数のエリアに区分するとき、取得された指先座標が属するエリアが隣接するエリアに移動するとき、回転動作の回転方向、および回転速度を計測し、回転動作による遊技者の入力情報として出力する。重心計算部163は、回転動作が1周する場合、順次取得される座標位置の重心位置を計算する。軸補正部164は、重心位置に、中心位置を移動させるように、画像が区分されたエリアを移動させてエリアを補正する補正量を計する。本発明は、遊技台の入力装置に適用することができる。
(もっと読む)
顔向き検出装置
【課題】ユーザの顔向きを精度良く検出できる顔向き検出装置を提供すること。
【解決手段】顔向き検出装置は、交差する縦縞及び横縞から構成された縞模様の光をユーザの顔に照射する(S11)。その顔をカメラで撮像する(S12)。撮像した顔画像から、光の縞模様を構成する矩形に対応する矩形対応部分をそれぞれ特定する(S13)。矩形対応部分ごとに、各矩形対応部分の変形具合に基づいて各矩形の法線方向を算出する(S14)。三次元モデルDB40に記憶された三次元の顔モデルの各部位の法線方向と各矩形の法線方向との誤差を算出する(S15)。誤差が閾値未満か否かを判断する(S16)。誤差が閾値より大きい場合には(S16:No)、閾値未満になるように顔モデルの三次元パラメータを変更する(S17)。誤差が閾値未満になったときの顔モデルの顔向きを運転者の顔向きとして決定する(S18)。
(もっと読む)
画像処理装置及び画像処理方法
【課題】前景領域の追跡を行う際に、誤検出された領域を含んでいるかを判断できるようにする。
【解決手段】動画における前景領域切り出し、および領域追跡における面積変化時に領域の画像特徴の差分を取って得られる差分から時間的な差分量を検出し、領域の面積変化時の誤検出領域を検出することで、誤検出された領域を含んだまま、領域追跡を行うと誤検出領域が後のフレームに伝播され、誤検出領域が拡大される不都合を防止できるようにする。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
通行車両監視システム
【課題】道路上の通行車両を正確に認識し、設置が容易で、かつトンネル内にどのような車両が存在するのかを把握することができる通行車両監視システムを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部21と、複数の画像から距離画像のデータを生成する立体計測部23と、基本監視部24と、メモリ27と、識別情報と、車両についての時刻情報とを含む情報を前記記憶部に記録する計測及び記録処理部と、追加監視部25を有し、センタ装置4は、車両の画像から認識された所定の標章についての標章情報を、距離画像に基づいて認識された車両と関連付ける標章情報関連付け部と、標章情報出力部と、を有する。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から当該次元毎に領域特徴量を算出し、各次元が複数のタイプに類型化され、当該タイプ毎に閾値を決定し、閾値を使用して、差分値を、画像識別子の各次元の値として量子化する。また、ある次元に関連付けられた2つの部分領域と他の次元に関連付けられる2つの部分領域とは、形状の組み合わせが異なる。さらに、ある次元が類型化されるタイプに対応する閾値と他の次元が類型化されるタイプに対応する閾値とが同一である場合に、ある次元に関連付けられた2つの部分領域と他の次元に関連付けられる2つの部分領域との距離が所定値以上である。
(もっと読む)
位置計測装置、位置計測方法及びマーカー
【課題】撮像画像における画素より小さな単位により画像中におけるマーカー位置を高精度に特定することを可能とする。
【解決手段】位置計測装置1では、マーカー画像が画像取得部10により取得され、二値化画像生成部11によりマーカー画像に基づき複数の異なる閾値ごとに二値化マーカー画像が生成され、マーカー重心座標算出部12により二値化マーカー画像におけるマーカーが捉えられた画素に基づきマーカー重心座標が算出されるので、当該二値化マーカー画像におけるマーカーの位置が特定される。また、1つのマーカーが捉えられたマーカー画像に基づき、画素の階調値に関する閾値を変えて複数の異なる二値化マーカー画像が生成され、複数の二値化マーカー画像ごとにマーカー重心座標が算出され、マーカー座標算出部13により複数のマーカー重心座標の重心の座標がマーカー座標として算出・出力される。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から当該次元毎に領域特徴量を算出し、各次元が複数のタイプに類型化され、当該タイプ毎に閾値を決定し、閾値を使用して、差分値を、画像識別子の各次元の値として量子化する。ある次元に関連付けられた2つの部分領域と他の次元に関連付けられる2つの部分領域とは、形状の組み合わせが異なり、また、ある次元に関連付けられた2つの部分領域と他の次元に関連付けられる2つの部分領域とで形状の組み合わせが同一である場合に、上記ある次元に関連付けられた2つの部分領域と上記他の次元に関連付けられる2つの部分領域との距離が所定値以上である。
(もっと読む)
侵入物体検出装置
【課題】監視領域内に存在する植栽の前を移動する侵入物体を検出するとともに、植栽の揺れによる誤検出を抑制できる侵入物体検出装置を提供する。
【解決手段】侵入物体検出装置100は、監視領域を撮影した監視画像を取得する撮像部10と、監視領域に侵入物体が存在しない状況において監視領域を撮影した画像である背景画像と、植栽が撮像されている画像上の領域を示す植栽領域を記憶する記憶部20と、監視画像と背景画像の差分によって、輝度値が変化した変化領域を抽出する変化領域抽出手段31と、変化領域について、変化領域が植栽領域と重なっている場合に重なっていない場合より侵入物体らしさが低くなる侵入物体らしさの度合いを表す侵入物体属性値を算出し、侵入物体属性値に基づいて変化領域が侵入物体によるものか否かを判定する判定手段36を有する。
(もっと読む)
視覚センシング方法および視覚センシング装置
【課題】汎用性に優れた視覚センシング方法を提供する。
【解決手段】撮影画像とマッチングモデルとを比較してパターンマッチングを行うパターンマッチング行程と、パターンマッチング行程で用いた撮影画像のうちマッチングモデルとマッチングした部位に基づいて更新マッチングモデルを生成し、更新マッチングモデルに基づいてマッチングモデルを更新するマッチングモデル更新行程とを含む。さらに、撮影画像から探索対象領域を絞り込んで探索対象画像を生成する探索対象画像生成行程を含み、パターンマッチング行程では、撮影画像の代わりに探索対象画像を用いてパターンマッチングを行い、探索対象画像生成行程では、以前に行った複数回のパターンマッチング行程で求めたマッチング位置に基づいて探索対象領域を決定する。
(もっと読む)
情報システム、端末装置、広告出力方法、およびプログラム
【課題】撮影オブジェクトを短時間に決定し、短時間に広告を出力できない。
【解決手段】端末装置の位置情報と方向情報と視野角を有する端末情報を取得する端末情報取得部と、位置情報と方向情報と視野角を各オブジェクト情報の領域情報に適用し、1以上の撮影オブジェクトを決定する撮影オブジェクト決定部と、決定した1以上の各撮影オブジェクトに対応する1以上の広告情報を取得する広告情報取得部と、カメラ部が取得した映像と1以上の広告情報を出力する出力部とを具備し、撮影オブジェクト決定部は、端末装置との距離が近い順にオブジェクトを検査し、端末装置が撮影しているとして先に決定したオブジェクトの撮影により不可視となる領域として登録していき、可視領域がなくなった場合に、撮影オブジェクトの判断処理を終了する端末装置により、撮影オブジェクトを短時間に決定し、短時間に広告を出力できる。
(もっと読む)
物体形状認識装置及び特徴点検出方法
【課題】境界上での特徴点検出処理を適正に行なうことにより、形状データから物体の形状を確実に認識できる物体形状認識装置が求められる。
【解決手段】本実施形態によれば、物体形状認識装置は、入力ユニットと、仮想面配置処理ユニットと、特徴点検出処理ユニットとを備えた構成である。入力ユニットは、物体の形状を表す形状データを入力する。仮想面配置処理ユニットは、前記形状データのデータ欠損部に仮想面を設定する。特徴点検出処理ユニットは、前記形状データ及び前記仮想面を使用して、前記物体の形状を構成するための特徴点を検出する。
(もっと読む)
ヒューマンコンピュータインタラクションシステム、手と手指示点位置決め方法、及び手指のジェスチャ決定方法
【課題】HCIシステムにおける手と手指示点の位置決め方法及び手指のジェスチャ決定方法を提供する。
【解決手段】手位置決め方法は、被制御領域の画像を連続取得して、前景物が含まれる画像列を取得する段階と、撮像した前記画像から前景画像を抽出し、抽出した前記前景画像の2値化処理を行って、2値化前景画像を生成する段階と、前記2値化前景画像の最小凸包の画素頂点集合を取得し、該最小凸包の各画素頂点を中心点に、手が含まれる候補領域として関心領域を構築する段階と、構築した前記各関心領域から手画像特徴を抽出し、パターン認識方法により、前記候補領域における前記手が含まれる関心領域を決定する段階とを含む。
(もっと読む)
画像処理装置、画像処理方法、撮像装置、および画像処理プログラム
【課題】画像中の被写体の主要度をより的確に判定することを可能とする。
【解決手段】画像処理装置100は、時系列に撮像して得られた一連の複数フレームの画像を入力する画像入力部102と、画像入力部102で入力された複数フレームの画像から、主要度の判定をする対象である判定対象領域を抽出する判定対象領域抽出部104と、複数フレームの画像中における判定対象領域の出現頻度に基づいて判定対象領域の主要度を判定する判定部106とを備える。
(もっと読む)
画像処理装置、撮像装置、及び画像処理プログラム
【課題】撮像された画像から主要被写体の領域を予測することができる画像処理装置、撮像装置、及び画像処理プログラムを提供する。
【解決手段】画像処理装置140は、画像における複数の特徴毎に、当該特徴の特徴量を算出する特徴量算出部141と、画像に含まれる領域であって特徴量毎に定まる領域を画像から検出し、識別子を設定する領域検出部142と、異なる特徴の特徴量に基づいて検出した領域同士を比較するための評点を、領域毎に算出する評点算出部143と、評点に基づいて、画像における領域の優先度を設定する優先度設定部144と、を備える。
(もっと読む)
対象検出装置、対象検出方法、分類器作成装置及び分類器作成方法
【課題】より正確に対象を検出すること。
【解決手段】開示の対象検出装置は、前景画像における特定点を極点とする極座標系において、当該極点から射出する複数の極線と、当該極点を円心とする複数の円とを用いて、隣り合う極線と、隣り合う円とで囲まれた領域、または、隣り合う極線と、前記円のうちの最小円とで囲まれた領域を示すメッシュに区分する。対象検出装置は、前記前景画像における輪郭画素の前記メッシュの参考方向に対する勾配方向を算出し、算出した勾配方向に基づいて前記メッシュの勾配方向のヒストグラムを前記メッシュごとに取得する。対象検出装置は、全てのメッシュの勾配方向のヒストグラムを連結して総ヒストグラムベクトルとし、前記総ヒストグラムベクトルに対してフーリエ変換を行って前記前景画像の特徴ベクトルを取得する。対象検出装置は、取得された特徴ベクトルに基づいて前記前景画像における対象に対して検出を行う。
(もっと読む)
21 - 40 / 334
[ Back to top ]