
Fターム[5L096GA38]の内容
Fターム[5L096GA38]の下位に属するFターム
Fターム[5L096GA38]に分類される特許
1 - 20 / 327
シルエット補正方法及びシルエット補正システム
色ヒストグラムに基づき画像領域を記述する方法およびシステム
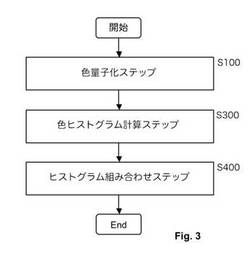
【課題】色ヒストグラムに基づき画像領域を記述する方法とシステムを提供する。
【解決手段】色ヒストグラムに基づいて画像領域を記述する方法は次のステップを有する。量子化において特定色範囲と特定色範囲の外の色とを異なる方法で処理して、画像領域を量子化色領域に量子化する色量子化ステップ。量子化色領域に従い一つ以上の色ヒストグラムを計算する色ヒストグラム計算ステップ。一つ以上の色ヒストグラムを使用してユニークベクトルを生成するヒストグラムアセンブルステップ。
(もっと読む)
IDカードの真贋判定システム、端末装置、IDカード。

【課題】近年、物理的特徴のコピー技術が発達しているので、それに対抗する認証システム及び端末装置が求められていた。
【解決手段】
IDカードの真贋判定システムにおいて、IDカードは、固有の物理的特徴を有した認証物を有し、端末装置には、ID入力部と、外光を遮蔽する暗空部と、カメラと、それぞれが異なる波長の光を発光する複数の光源を選択して発光させる複数の発光パターンを有し、この発光パターンによるチップ解析データ(画像データ)をチップデータとして予め記憶し、このチップデータと、新たに撮影されたチップ解析データによって認証物の真贋を判定する。
この判定時に、前記チップ解析データと前記チップデータとによる認証物の真贋の判定を前記発光パターンを変えて複数回行い、何れの判定においても前記認証物が適合した際に前記認証物が真と判定されるとした。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】撮像された対象物に対応する商品の確定を簡便化して、より効率的に行うことが可能な情報処理装置及びプログラムを提供する。
【解決手段】実施形態の情報処理装置は、取込手段と、報知手段とを備える。取込手段は、撮像手段が撮像した画像を取り込む。報知手段は、前記撮像手段で撮像された物体の画像と、各商品の基準画像とがどの程度類似しているかを示す類似度が、前記撮像された商品を前記基準画像に対応する商品のうち一の商品として確定する条件を満たした場合に、前記撮像された商品が前記条件を満たした前記基準画像に対応する商品として確定されたことを報知する。
(もっと読む)
画像処理装置、画像処理方法
【課題】波長帯の異なる領域を抽出するための閾値を自動的に決定する。
【解決手段】高空から撮影した地理画像データにおける画素において、第1の波長帯の分光輝度値と、記第1の波長帯とは異なる第2の波長帯の分光輝度値と、に基づいて画素を識別するための正規化指標値を演算する正規化指標演算部と、各画素における前記正規化指標値と出現頻度との関係を求め、クラス内分散とクラス間分散の比である分離度が最大となる正規化指標値を判別分析法により求め、前記画素を識別するための閾値として決定する閾値決定部と、前記閾値と対応する正規化指標値に基づいて、前記第1及び第2の波長帯により区別される画像データの領域を抽出する領域抽出部と、を有することを特徴とする画像処理装置。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
画像処理装置
【課題】パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、輝度が復元された一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部176と、を備え、色復元部およびマッチング処理部は、ベイヤー配列で占有度が最も高い色相のみを対象に、それぞれ輝度の復元およびマッチングを実行する。こうして、パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
画像解析装置および画像評価装置
【課題】人物とその地点を代表するランドマークのようなオブジェクトとが被写体となるような撮影画像を解析してオブジェクトの位置を識別する。
【解決手段】オブジェクト探索領域抽出部303は、画像データから顔領域および胴体領域を除いてオブジェクト探索領域を抽出する。顕著領域候補抽出部304は、オブジェクト探索領域から複数の顕著領域候補を抽出する。独自色性算出部305は、オブジェクト探索領域の各画素の色情報を識別し、各色の独自色性を、その出現頻度および他の色との距離に基づいて定量的に算出する。存在確率算出部307は、オブジェクト領域の存在確率をブロック単位で算出する。オブジェクト領域識別部308は、各顕著領域候補の顕著領域としての尤度を算出し、最尤の顕著領域候補をオブジェクト領域に決定する。
(もっと読む)
物体認識装置および物体認識方法
【課題】任意の色の物体を認識でき、認識対象物と背景が同系色であっても認識ができ、かつ処理速度が速い物体認識装置を提供する。
【解決手段】物体認識装置は、カラー画像の複数の色成分情報を抽出し、抽出された複数の色成分情報と、該色成分情報に対応する複数の閾値に基づいて、カラー画像から複数の2値化画像を生成し、生成された2値化画像に含まれる領域をカラー画像から抽出し、抽出された領域に基づいて、該領域における物体を認識する。
(もっと読む)
店舗システム及びプログラム
【課題】登録・精算にかかる商品以外の物品が登録・精算時に持ち込まれた場合に、その物品に関する報知を行うことを可能とする。
【解決手段】実施形態の店舗システムは、撮像手段が撮像した画像を出力する画像出力手段と、出力された画像の特徴量を読み取ることによって特定の物体を認識する物体認識手段と、認識された物体が、売上登録に用いる情報を記憶する商品ファイルに含まれる商品以外の物体である場合に、売上登録にかかる商品以外の物体を認識したことを報知する報知手段と、を備える。
(もっと読む)
オブジェクト探索装置、映像表示装置およびオブジェクト探索方法
【課題】簡易な手法で高速かつ精度よくオブジェクトを探索できるようにする。
【解決手段】一実施形態に係るオブジェクト探索装置は、画面フレームに含まれるオブジェクトを探索するオブジェクト探索手段と、オブジェクト探索手段で探索されたオブジェクトを含むオブジェクト探索領域内の中心位置にオブジェクトが位置するように、オブジェクト探索領域の位置を補正するオブジェクト位置補正手段と、オブジェクト探索領域内のオブジェクト以外の背景領域が最小になるようにオブジェクト探索領域の面積をサイズ調整するオブジェクト領域補正手段と、オブジェクト領域補正手段で補正したオブジェクト探索領域に基づいて、オブジェクトの座標位置を検出する座標検出手段と、を備える。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
動画提示装置
【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】時系列順に撮像された一連の画像から網羅性の高い要約画像を検出することができる画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】画像処理装置は、時系列順に撮像された一連の画像間において同一の対象が映る領域同士を対応づけ、該対応づけられた領域全体を1つの連結領域として設定する対応領域連結部110と、該連結領域の特徴量を算出する連結領域特徴量算出部120と、特徴量をもとに、上記一連の画像に映された対象が該一連の画像内の各画像に集約されている度合いに対応する要約指標値を算出する要約指標値算出部130と、要約指標値をもとに要約画像を検出する要約画像検出部140とを備える。
(もっと読む)
個体識別装置、個体識別対象物、個体識別方法、及びプログラム
【課題】 微細物質を対象物にランダムに付与し、個体識別に利用する個体識別システムにおいて、精度を損なわずに高速に対象物の検証を行うことが可能な個体識別装置等を提供する。
【解決手段】 異なる種類の微細物質20A、20Bを異なる数量で対象物2に付与する。個体識別装置4は少数付与された微細物質20Aの配置パターンに基づく特徴量データをインデックス認証用データ6Aとしてデータベース5に登録するとともに、多数付与された微細物質20Bの配置パターンに基づく特徴量データを本認証用データ6Bとして登録する。認証処理では、対象物2から、まず微細物質20Aの配置パターンに基づき算出された特徴量データと、データベース5のインデックス認証用データ6Aを照合し、認証成功すると、微細物質20Bの配置パターンに基づき算出された特徴量データと、データベース5の本認証用データ6Bを照合する。
(もっと読む)
領域抽出装置、撮像装置、及び領域抽出プログラム
【課題】撮像された画像から主要被写体の領域を抽出することができる領域抽出装置、撮像装置、及び領域抽出プログラムを提供する。
【解決手段】領域抽出装置140は、撮像された画像から画像特徴量に基づいて第1領域を抽出し、且つ、画像に定められた位置から画像特徴量に基づいて第2領域を抽出する領域抽出部142と、予め定められた条件を第1領域及び第2領域の少なくとも一方が満たすか否かを判定し、第1領域及び第2領域のうち、予め定められた条件を満たす第1領域及び第2領域を選択する判定部143と、判定部143が選択した第1領域及び第2領域の分布を記憶する記憶部145と、を備える。
(もっと読む)
画像分類方法
【課題】形容詞によって画像を分類する画像分類方法を提供する。
【解決手段】少なくとも2つの色面に関する画像の2次元分布関数の各々を入力する分布関数入力ステップと、2次元展開係数によって2つの分布関数の各々を記述する記述ステップと、2次元展開係数の各々を12通りの一次元配列の展開係数に並び替える並び替えステップと、対称積で表される2次形式の要素を12×12通りの並び替えの方向組み合わせについてそれぞれ生成する要素生成ステップと、生成された144通りの2次形式の要素の各々について、一定の量子数の差を持った全ての要素の和をとった物理量を、複数の量子数の差に対して生成する物理量生成ステップと、生成された各々の物理量の少なくとも1つに基づき、画像の2次元分布関数の形状の特徴を評価する評価ステップと、評価結果に基づいて画像を少なくとも2つの範疇の画像に分類する分類ステップとを備える。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より精度よく高速にグローバル動きベクトルを求めることができるようにする。
【解決手段】グローバル動きベクトル予測部は、過去の撮像画像のグローバル動きベクトルから、処理対象のフレームの撮像画像のグローバル動きベクトルの予測値を算出し、有効領域算出部は、その予測値に基づいて、撮像画像上の有効領域を定める。局所特徴量算出部は、撮像画像上の有効領域から局所特徴量を抽出し、積分射影部は、抽出された局所特徴量を所定方向の軸に射影することで、射影特徴ベクトルを算出する。グローバル動きベクトル算出部は、連続する2つのフレームの射影特徴ベクトルのマッチング処理を行うことにより、グローバル動きベクトルを算出する。本発明は、撮像装置に適用することができる。
(もっと読む)
輪郭抽出装置、輪郭抽出方法、及び、コンピュータプログラム
【課題】 被写体が比較的遠距離に位置する場合であっても、被写体の輪郭を簡易に抽出できる輪郭抽出装置を提供する。
【解決手段】 ステップS51にて、CPU3は、現在画像と前回画像との間の差分画像の各画素について、画素値の絶対値が一定値以上の画素のスコアに、一定ポイントを加算して、スコアを更新する。ステップS53にて、CPU3は、差分画像の各画素のスコアを、新たな画素値(頻度画素値)として、平滑化及び減衰処理を実行する。ステップS55にて、CPU3は、平滑化及び減衰処理後の頻度画素値が1ポイント以上の(0でない)範囲を有効領域VAに設定する。有効領域VAは、動いた部分及びその周辺部分であり、動いた部分を漠然と抽出し、これに基づき、輪郭を抽出する。
(もっと読む)
作業前後写真照合システム
【課題】作業前後の作業現場の同一性を高い精度で照合することが可能な作業前後写真照合システムを提供する。
【解決手段】作業前後写真照合システム1の事務側装置30は、撮影端末10により撮影された作業現場の写真の画像データを読み取る写真読取部302と、写真読取部302により読み取られた作業前後の写真の画像データの特徴点を解析する特徴点解析手段361と、写真における位置情報と、外部から入力された前記作業現場のスケッチデータに付随するテキストデータと、を関連付けた関連付けデータを作成する関連付け手段362と、特徴点解析手段361による解析結果と、前記関連付けデータとに基づいて、作業前後の作業現場の同一性を照合する同一性照合手段311とを備えている。
(もっと読む)
1 - 20 / 327
[ Back to top ]