
Fターム[5L096HA03]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816)
Fターム[5L096HA03]の下位に属するFターム
移動ベクトル (1,211)
Fターム[5L096HA03]に分類される特許
141 - 160 / 605
オブジェクト検出装置、オブジェクト検出方法、およびオブジェクト検出プログラム

【課題】連続して入力された画像のシーンに依存することなく、高精度に、かつ所定の時間内にオブジェクト検出処理を行うことが可能なオブジェクト検出方法、オブジェクト検出プログラムを提供する。
【解決手段】連続して撮影された画像の各々の画像内に設定スキャンウィンドゥを設定するスキャンウィンドゥ設定手段と、前記設定スキャンウィンドゥ内の画像に対して第1のオブジェクト検出を実行し前段処理結果を出力する第1のオブジェクト検出手段と、第2のオブジェクト検出手段によって検出された過去処理結果を保持する過去処理結果保存部と、前記前段処理結果と前記過去処理結果に基づき選択スキャンウインドゥを選択するスキャンウインドゥ選択部と、前記選択スキャンウインドゥからオブジェクトを検出する前記第2のオブジェクト検出部とによって構成されるオブジェクト検出装置。
(もっと読む)
動体検出装置と動体検出方法およびプログラム

【課題】動体までの距離や動体の移動速度にかかわらず安定して動体を検出できるようにする。
【解決手段】検出処理部34で、現画像と過去画像を用いて算出した動きベクトルに基づき動体検出を行う。検出結果処理部35は、検出処理部34の動体検出処理部34S,34M,34Lのいずれかで動体が検出されたとき、動体が検出されたことを出力する。動体検出処理部34S,34M,34Lは、現画像と過去画像の解像度と、現画像と過去画像との時間間隔と、動きベクトルの探索範囲の少なくともいずれかを相違させることで、動体の遠近状態や移動速度に対する動体検出特性を互いに異なる特性とする。検出処理部34は、動体までの距離や動体の移動速度にかかわらず安定して動体を検出できるようになる。
(もっと読む)
撮像装置、撮像方法及び撮像プログラム
【課題】 ブロックマッチングによる被写体追従の追従精度を向上する。
【解決手段】 所定のフレーム画像から注目画素領域(15)を抽出する注目画素領域抽出手段(6d)、現フレーム画像から順次に比較画素領域(20)を抽出する比較画素領域抽出手段(6e)、各比較画素領域と注目画素領域との相関度を導出する相関度導出手段(6f)、各相関度をその補正係数が予め設定されている相関度補正マップ(6g)に基づいて補正して比較画素領域毎に補正相関度を導出する相関度補正手段(6h)、補正相関度に基づいて各比較画素領域から比較画素領域を選択する比較画素領域選択手段(6i)を備え、注目画素領域抽出手段は所定の新たなフレーム画像が取得された場合に、前記比較画素領域選択手段により選択された比較画素領域を新たな注目画素領域として抽出する。
(もっと読む)
対象物追跡装置、対象物追跡方法、および制御プログラム
【課題】対象物の周囲に対象物の類似物が存在する場合においても、対象物を正確に追跡することができる対象物追跡装置を実現する。
【解決手段】本発明に係る物体追跡装置は、現フレームの前のフレームにおける、対象物と、対象物と同様の特徴を有する類似物との位置関係から追跡状態を判定する状態判定部31と、現フレームにおける対象物の位置を特定する対象物探索部33と、対象物の周辺の所定の領域である周辺領域に類似物が存在する場合、現フレームにおける類似物の位置を特定する周辺探索部37とを備え、追跡状態が「重なり」である場合、対象物予測部41は、前のフレームにおける、対象物の位置と対象物の運動状態とに基づいて、現フレームにおける対象物の位置を予測して対象物の位置を特定し、追跡状態が「重なり」ではない場合、対象物探索部33は、現フレームの画像から対象物を探索して対象物の位置を特定する。
(もっと読む)
画像揺れ補正装置
【課題】信頼度の高い画像全体の動きベクトルに基づいて、画像全体の揺れを補正する。
【解決手段】画像揺れ補正装置は、画像内の複数の領域の動きベクトルをそれぞれ検出する領域ベクトル検出部(102)と、複数の領域の動きベクトルのそれぞれの信頼度を判定する信頼度判定部(103)と、信頼度が低いと判定された動きベクトルが検出された領域に代えて新たな検出対象領域を領域ベクトル検出部に指示する領域指示部(105)と、信頼度が高いと判定された動きベクトルから画像全体の動きベクトルを算出する画像ベクトル算出部(106)と、画像全体の動きベクトルに応じて出力すべき画像全体を移動させて画像の揺れを補正する揺れ補正部(107)とを備えている。
(もっと読む)
物体検出装置、物体検出方法及び物体検出プログラム
【課題】物体(人物)が比較的長い期間静止している場合でも、物体が背景モデルに同化することを抑制し、正確な物体の数の計数を可能とする。
【解決手段】物体検出処理部3では、固定カメラ1で撮影された入力画像と背景モデルとを、複数の画素からなるブロックに分割し、各ブロック毎に物体の輪郭に対応する物体領域を抽出する。また、この輪郭部分の内側の領域を埋めるように膨張処理を行うとともに、この膨張処理による物体領域の過剰検出を抑制する収縮処理を行う。荷重値テーブル生成部5は、物体の数に対する各画素の寄与率を表す荷重値を求めて荷重値テーブルを生成する。物体計数部6は、物体領域中の画素の荷重値を積算して物体の数を計数する。
(もっと読む)
移動物体追跡装置
【課題】監視空間内を移動する複数の移動物体が接近した場合に追跡対象の取り違えが起こる可能性がある。
【解決手段】監視空間を撮影した時系列の監視画像の任意時刻にて注目物体の像に対応する注目領域を設定する(S1)。注目領域から注目物体の像についての互いに異なる複数の注目特徴を抽出する(S2)。各時刻の監視画像から各注目特徴を有する特徴領域を検出し(S5)、注目特徴毎に、注目物体の位置に対応した特徴領域を追跡領域として設定し、それ以外の特徴領域をダミー領域として設定する(S6)。過去の特徴領域の位置に基づいて当該特徴領域の現時刻の移動先を予測する(S7)。予測された移動先に基づいて注目特徴毎に追跡領域とダミー領域との接近の発生を推定し、当該接近が生じないと推定された注目特徴の追跡領域の位置に基づいて注目物体の位置を判定する(S11)。
(もっと読む)
移動物体追跡装置
【課題】監視空間内を移動する複数の移動物体が接近した場合に追跡対象の取り違えが起こる可能性がある。
【解決手段】監視空間を撮影した時系列の監視画像にて移動物体の像を検出する。注目物体に接近する物体がある場合は(S54)、注目物体の色ヒストグラムのうち複数時刻で共通する色からなる特徴不動範囲と、接近物体の複数時刻の色ヒストグラムのうち一度でも現れた色からなる特徴変動範囲とを比較する(S55)。そして、注目物体の特徴不動範囲のうち接近物体の特徴変動範囲と重複しない範囲で、注目物体の追跡特徴を設定する(S57)。このように時系列の監視画像に基づいて物体相互の位置関係を常時、判断し、接近状態では追跡特徴を接近相手とは弁別可能なものにする。
(もっと読む)
ドライブレコーダー装置、記録方法、プログラム及び記録媒体
【課題】確実に事故時の画像を記録できる、信頼性の高いドライブレコーダー装置、記録方法、プログラム及び記録媒体を提供する。
【解決手段】車両周辺の状況を撮影して記録するドライブレコーダー装置であって、自車両の少なくとも前方の状況を撮像した画像データを出力するビデオカメラ手段と、ビデオカメラ手段が出力する画像データに基づいて認識処理を行う画像認識処理手段と、ビデオカメラ手段が出力する画像データを記録する画像記録手段と、を有し、画像認識処理手段は、画像データ内のある物体が特徴的な変化をしたことを認識した場合において、特徴的な変化を異常な状態として検出する異常検出処理手段を備え、画像記録手段は、異常検出処理手段で異常が検出された時刻に基づいて記録を開始する時刻を決定し、画像データを記録する。
(もっと読む)
測光モデルを更新するための装置
測光モデルは、カメラにより提供された画像内に、測定可能な物理的規模の少なくとも1つのガウス・モデルを含み、それは物理的規模の平均及び分散により定義される。
本装置は:
−閉ループにおいて搭載された第一の加算器を含む、物理的規模の現在値に基づき、平均を計算するための手段と、
−第二の加算器を含む、物理的規模の平均と現在値との差を測定する手段と、
−自動制御装置を含む、差を減らすための手段とを備える。
第一の加算器、第二の加算器、及び自動制御装置は、観察された光景の安定期間中にゆっくりとモデルを更新し、観察された光景の移行期間中に速くモデルを更新するように、第−の加算器の閉ループ制御内に集められる。
用途:ビデオ監視、バックグラウンド除去
(もっと読む)
画像処理装置、画像処理方法及び画像処理用プログラム
【課題】高精度にカメラ移動の検出を可能とする。
【解決手段】移動可能なカメラにより撮像された画像における1フレーム中のm×m(m:2以上の整数)画素を1ブロックとして、時間的に前後のフレームにおける対応する複数のブロックについてそれぞれの輝度データによる行列を前後のフレーム分作成する行列作成手段21と、前記対応する行列を用いて共分散行列を生成する生成手段22と、前記共分散行列から固有値及び固有ベクトルを求め、固有値及び固有ベクトルに基づき前後のフレームの対応する各ブロック間のユークリッド距離を求める演算手段23と、求められたユークリッド距離に基づき閾値を算出する閾値算出手段24と、ユークリッド距離と前記閾値との比較に基づき移動物体を検出する移動物体検出手段25とを具備する。
(もっと読む)
混雑度測定装置
【構成】CPU14pは、平面を鳥瞰した状態を表すマップ画像をモニタ16に表示し、表示されたマップ画像上で1または2以上の矩形エリアを指定するドラッグ操作を入力装置18を通して操作者から受け付ける。カメラ12は、平面を捉える撮像面を有し、被写界像つまりカメラ画像を繰り返し出力する。CPU14pは、カメラ12から出力されたカメラ画像を取り込み、ドラッグ操作によって指定された1または2以上の矩形エリアにそれぞれ対応する1または2以上の測定エリアをカメラ画像に割り当てる。CPU14pはさらに、平面に存在する1または2以上の動体の混雑度をカメラ画像に割り当てられた測定エリア毎に測定する。
【効果】初期設定のための作業負担を抑制することができる。
(もっと読む)
画像処理装置、画像処理方法及び画像処理用プログラム
【課題】高精度な移動物体検出を可能とする。
【解決手段】画像における1フレーム中のm×m(m:2以上の整数)画素を1ブロックとして、時間的に前後のフレームにおける対応する複数のブロックについてそれぞれの輝度データによる行列を前後のフレーム分作成する行列作成手段21と、前記対応する行列を用いて共分散行列を生成する生成手段22と、前記共分散行列から固有値及び固有ベクトルを求め、固有値及び固有ベクトルに基づき前後のフレームの対応する各ブロック間のユークリッド距離を求める演算手段23と、ユークリッド距離と閾値とを用いて画像処理を行う処理手段24とを具備する。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
対象物の位置特性の判定
室内の対象物の位置特性を判定するシステムであって、部屋の検出領域のため背景表面に配置された、光学的に識別可能な要素(103)を含むシステムを提案する。カメラ(101)が光学的に識別可能な要素(103)の向かい側に検出領域を横切って配置され、検出領域と光学的に識別可能な要素とを含む画像を取得する。検出器(403)が光学的特性に基づいて画像内の光学的に識別可能な要素を検出する。閉塞プロセッサ(405)が光学的特性に応じて画像内の光学的に識別可能な要素(103)の閉塞特性を判定する。位置プロセッサ(407)が閉塞特性に応じて深さ位置を判定し、その深さ位置はカメラ(101)の光軸に沿った対象物の位置を示す。本発明は例えば室内の人物の存在や大まかな位置測定を可能にしてもよい。 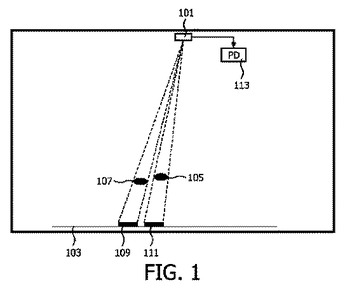 (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】そこで、本発明は、眼鏡を掛けた歩行者や帽子を被った歩行者について、歩行者であることの判定ができなくなることを抑制した車両周辺監視装置を提供する。
【解決手段】赤外線カメラの撮像画像のグレースケール画像を2値化処理して生成された2値画像から、処理対象画像部分を抽出する2値画像候補抽出手段20と、処理対象画像部分が歩行者の頭部の特徴を有するか否かを判断して、処理対象画像部分に対応する実空上の物体が歩行者であるか否かを識別する歩行者識別手段21とを備え、歩行者識別手段20は、所定範囲内の間隔をもって垂直方向に対向した二つの処理対象画像部分75,76が抽出されたときには、該間隔部分を埋めて該二つの画像部分を一体化した画像部分について歩行者の頭部の特徴を有するか否かを判断して、該二つの画像部分に対応する実空間上の物体が歩行者であるか否かを識別する。
(もっと読む)
追跡方法
本発明は、フレーム・シーケンス内の少なくとも1つの物体を追跡する方法であって、各フレームが画素アレイを有し、深さ値が各画素に関連付けられている方法に関する。この方法は、各フレームの前記画素の少なくともいくつかを複数の領域にグループ分けするステップと、前記領域を、相互接続された領域のクラスタB1,…,B5にグループ分けするステップと、2次元投影で別のクラスタB1に隣接する少なくとも1つのクラスタB2,…,B5が前記別のクラスタB1の深さ値よりも高い深さ値を有する場合に、少なくとも1つのクラスタB2,…,B5が前記別のクラスタB1によって部分的に遮蔽されている物体に属すると判断するステップを含む。 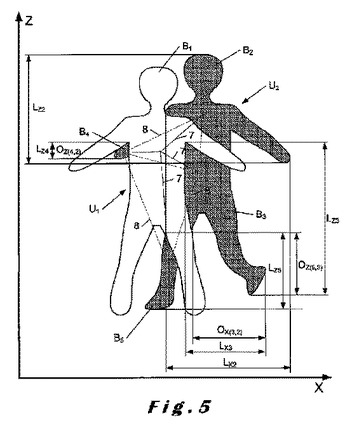 (もっと読む)
(もっと読む)
障害物検出装置
【課題】様々な姿勢が予想される一般に困難である人等の検出対象物体の検出が、その動静や姿勢にかかわりなく高精度に検出することが可能な障害物検出装置を提供する。
【解決手段】時間的に連続する画像を取り込む画像取得部101と、画像について主に動体を検出するモーションベース検出部120と、画像について主に静物を検出する非モーションベース検出部120と、を有し、非モーションベース検出部は、画像の任意の所定領域(車両幅分の前、または後ろ)のみを対象とし、モーションベース検出部は、画像の所定領域より広い範囲を検出対象とする。
(もっと読む)
モデル・ベースの競技場位置合わせ
【課題】モデル・ベースのプレイフィールド位置合わせのための方法、装置およびシステムを提供する。
【解決手段】入力ビデオ画像が処理される。ビデオ画像の処理は、ビデオ画像に関係するキー点を抽出することを含む。さらに、ビデオ画像に関係する十分なキー点が抽出されたかどうかが判定され、十分なキー点が抽出されていた場合、ビデオ画像の直接的推定が実行され、該直接的推定に基づいて最終的ビデオ画像のホモグラフ行列が生成される。
(もっと読む)
撮像装置、画像処理装置、画像処理方法
【課題】 従来の印刷効果の合成方法においては、ユーザは印刷装置で様々な設定を行う必要があり、手間がかかるという課題があった。本発明は特別な装置を用いることなく、かつ手間のかからない画像合成システムを提供することを目的とする。
【解決手段】 本発明に関する画像合成システムにおいては、撮影直前の被写体の動きに応じて自動で合成用画像を付加することによって、画像合成用の特別な操作をせずに画像合成を行うことを特徴とする。
(もっと読む)
141 - 160 / 605
[ Back to top ]