
Fターム[5L096HA03]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816)
Fターム[5L096HA03]の下位に属するFターム
移動ベクトル (1,211)
Fターム[5L096HA03]に分類される特許
81 - 100 / 605
移動体識別装置、移動体識別プログラム
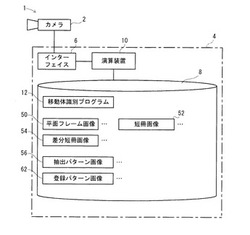
【課題】移動体について、障害物があったとしても、情報処理量の少ない効率的な処理によって、通過数のみならず、その種類をも、移動体の速度にかかわらず極めて精度の良好な状態で識別可能な移動体識別装置、移動体識別プログラムを提供する。
【解決手段】 演算装置10は、複数種類の移動体の移動方向に交差する短冊画像52について取得し、各短冊画像52に属するライン画像において変化の有無に係るライン画像の境目の位置情報から位置変量を算出し、更にこれに基づき移動体の通過速度を算出して、各短冊画像52における通過速度に応じた幅の部分を参照し、当該部分を移動体の移動方向と逆の方向へ時刻順に結合して抽出パターン画像56を生成し、移動体の種類ごとに予め格納された登録パターン画像62と抽出パターン画像56とをDPマッチングにより比較して、登録パターン画像62の種類に係る移動体を識別する。
(もっと読む)
侵入物体検出装置

【課題】監視領域内に存在する植栽の前を移動する侵入物体を検出するとともに、植栽の揺れによる誤検出を抑制できる侵入物体検出装置を提供する。
【解決手段】侵入物体検出装置100は、監視領域を撮影した監視画像を取得する撮像部10と、監視領域に侵入物体が存在しない状況において監視領域を撮影した画像である背景画像と、植栽が撮像されている画像上の領域を示す植栽領域を記憶する記憶部20と、監視画像と背景画像の差分によって、輝度値が変化した変化領域を抽出する変化領域抽出手段31と、変化領域について、変化領域が植栽領域と重なっている場合に重なっていない場合より侵入物体らしさが低くなる侵入物体らしさの度合いを表す侵入物体属性値を算出し、侵入物体属性値に基づいて変化領域が侵入物体によるものか否かを判定する判定手段36を有する。
(もっと読む)
対象物識別装置及びプログラム
【課題】対象物の識別に適した画像を適切に選択して、誤判定を低減する。
【解決手段】撮像装置12により異なる露光条件で撮像された複数の撮像画像を取得し、ウインドウ画像抽出部22で、撮像画像の各々に判定枠を設定し、判定枠を走査しながらウインドウ画像を抽出する。ウインドウ画像選択部24で、撮像画像の同一位置から抽出された同一サイズのウインドウ画像の各々から、ウインドウ画像の各々の輝度分布の分散を求め、輝度分布の分散が所定値以上のウインドウ画像を選択する。識別部28で、選択されたウインドウ画像と識別モデル記憶部26に記憶された識別モデルとに基づいて、ウインドウ画像が対象物を表す画像か否かを識別する。
(もっと読む)
物体検知装置、物体検知方法、監視カメラシステム、およびプログラム
【課題】カメラを設置したシーンに対するパラメータを設定して物体と外乱の区別を精度よく行う。
【解決手段】画像データを取得する画像取得部と、画像データを構成する部分領域ごとに特徴量を抽出する特徴抽出部と、対象物体を含まない背景画像データから特徴抽出部により抽出された特徴量を、背景特徴量として部分領域ごとに記憶する背景特徴量記憶部と、部分領域ごとに、抽出された特徴量と背景特徴量とを比較して、部分領域のそれぞれが対象物体であるか否かを判定する第1の物体領域判定部と、第1の物体領域判定部による複数の判定結果に基づいて、部分領域ごとにパラメータを決定するパラメータ決定部と、決定されたパラメータと、第1の物体領域判定部による判定結果とに基づいて、部分領域が対象物体であるか否かを判定する第2の物体領域判定部と、を備える。
(もっと読む)
画像処理装置、画像処理方法
【課題】 認識対象および認識対象を含まない画像パターンを、人手を掛けずに収集する為の技術を提供すること。更に、このようにして収集した画像パターンを識別器の学習に用いることにより、高精度の画像認識を行うこと。
【解決手段】 物体追跡部31は、動画像を構成する各フレームの画像から、認識対象が映っている領域を抽出する。画像変換部32は、この領域内の画像に対して幾何変換を行った画像に基づいて認識対象サンプルを生成する。領域切出部34は、動画像を構成するフレームの画像に対して領域を設定する。画像合成部35は、設定したそれぞれの領域内の画像中の複数の領域を合成した画像に基づいて非認識対象サンプル画像を生成する。学習部40は、認識対象サンプルと非認識対象サンプルとを用いて認識対象を学習する。
(もっと読む)
物体検出装置
【課題】走行する車両等から撮像された時系列画像に撮像された物体を、精度良く検出することができる物体検出装置を提供する。
【解決手段】物体検出装置100は、物体が撮像された時系列画像を取得する画像取得部110と、回帰直線により物体の動き量を最適化し、最適化した動き量に基づいて、物体が撮像された領域を時系列画像から抽出し、該領域の分布情報を出力する領域抽出部120と、領域の分布情報と時系列画像とを取得し、分布情報が表す領域を、時空間MRFによって物体毎に分割することにより、該領域に撮像された物体を検出する領域分割部140とを備える。
(もっと読む)
画像センサ
【課題】侵入物体よりも撮像部に近い位置に発生する外乱を侵入物体と誤判定することを抑制できる画像センサを提供する。
【解決手段】画像センサ100は、監視領域を撮影した監視画像を順次取得する撮像部10と、監視画像と背景画像から変化領域を抽出する変化領域抽出手段31と、変化領域が侵入物体の性質を持つ度合いを侵入物体属性値として算出する侵入物体属性値算出手段32と、変化領域が侵入物体以外の外乱である特定外乱の性質を持つ度合いを外乱属性値として算出する外乱属性値算出手段33と、外乱属性値の高い変化領域が所定時間内に所定頻度で重なって現れる領域を外乱領域として設定する外乱領域抽出手段35と、変化領域毎に変化領域が侵入物体か特定外乱かを判定する判定手段36を有し、判定手段36は、変化領域が外乱領域に重なる割合が大きいほど侵入物体と判定し難くする。
(もっと読む)
画像処理装置、その処理方法及びプログラム
【課題】対象物の検出精度を向上させる技術を提供する。
【解決手段】画像処理装置は、検出すべき対象物を含む画像から輝度情報に基づいて第1の特徴量を取得する第1の特徴量取得手段と、第1の特徴量に基づいて画像から領域を検出するとともに、当該領域における対象物に対する尤度を算出する尤度算出手段と、算出された尤度が第1の閾値以上である領域を対象物が存在する対象物領域として検出するとともに、算出された尤度が第1の閾値未満で且つ第2の閾値以上である領域を対象物が存在する可能性のある候補領域として検出する第1の検出手段と、候補領域について第1の特徴量とは異なる第2の特徴量を取得する第2の特徴量取得手段と、第2の特徴量の値に基づいて各候補領域の尤度を補正する補正手段と、補正された尤度が第1の閾値と第2の閾値との間の値を持つ第3の閾値以上となる候補領域を対象物領域として検出する第2の検出手段とを具備する。
(もっと読む)
動画オブジェクト検出装置、方法、及びプログラム
【課題】オブジェクトの誤検出と検出漏れとの双方を抑制する。
【解決手段】オブジェクト検出手段12は、動画像のフレーム画像からオブジェクトを検出し、検出したオブジェクトの位置をオブジェクトリスト記憶部14に記憶する。オブジェクト追跡処理手段13は、オブジェクトリスト記憶部14に記憶されたオブジェクトの位置を、そのオブジェクトが検出された時刻以後、複数フレーム間で追跡し、オブジェクトリスト記憶部14に記憶する。また、オブジェクト追跡処理手段13は、オブジェクト検出手段12でオブジェクトが新たに検出されたとき、その新たに検出されたオブジェクトの位置を、オブジェクトが検出されたフレーム画像の時刻よりも前の時刻に遡って複数フレーム間で追跡し、オブジェクトリスト記憶部14に記憶する。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】 背景差分法により移動体を検出する際にメモリに格納する画像データ量を大きく削減できる画像処理装置、及び画像処理方法を提供する。
【解決手段】 動画像を取得する画像データ入力部1と、動画像の個々の画像フレームを複数エリアに分割し、分割した個々の小画像に対して画素毎に予め設定した複数階調の輝度の何れかに分類して頻度のヒストグラムを生成するヒストグラム生成部2と、生成したヒストグラムの個々の階調の頻度を2値に畳み込む畳み込み処理部3と、時系列の複数の画像に対して畳み込み処理部3が畳み込んだ個々のデータを平均化して統計データを算出する統計データ算出部4と、算出した統計データを記憶するメモリ7と、記憶している統計データと、新たに入力された画像フレームの畳み込みデータとを比較し、データの変化量から個々の小画像内の移動体の有無を識別する移動体領域識別部5とを備える。
(もっと読む)
画像認識装置
【課題】検知対象物を検知する性能が向上した画像認識装置の提供。
【解決手段】赤外線カメラ10によって生成される前方画像50から、前方領域に存在する歩行者を表す画像50aを検知する画像認識装置100である。赤外線カメラ10は、前方領域の明るさに応じてカメラゲインを変更することによりコントラストの調整された前方画像50を生成する。そのため、画像認識装置100は、複数群のサンプル画像61a〜63aのコントラストに応じて作成された複数の事前学習モデル31〜33を記憶するデータベース30と、当該カメラゲインに対応する事前学習モデル31〜33をデータベース30に記憶された複数の事前学習モデル31〜33から選択する最適モデル選択部27と、選択された事前学習モデル34に基づいて前方画像50から歩行者を表す画像50aを検知する歩行者認識部21と、を備える。
(もっと読む)
移動体検出装置及びプログラム
【課題】カメラの撮影映像から移動体を検出する装置の検出能力を高める。
【解決手段】移動体検出装置は、撮影映像から特徴点及び動きのある特徴点を抽出し、この抽出結果とテンプレートデータとを比較して移動体を検出する。テンプレートデータは、撮影映像において移動体が映る領域の位置情報、移動体が映っている状態での当該領域の特徴点及び動きのある特徴点の分布を表す空間分布特徴量が記述されたデータである。空間分布特徴量は、対象領域を区画化してなる区画毎の当該区画の特徴点数及び動きのある特徴点数を表す要素からなるベクトル量である。移動体検出装置は、上記抽出結果に基づき、テンプレートデータが示す領域に対応する移動体検出対象の領域において区画毎の特徴点数及び動きのある特徴点数をカウントして空間分布特徴量を生成する。そして、これとテンプレートデータが示す空間分布特徴量とを比較することにより、移動体を検出する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】静止した検出対象の検出精度が低下する問題を避けながら、動き情報を対象物の検出に汎用的に活用できる技術を提供することを目的とする。
【解決手段】時系列に連続する複数の静止画像を入力する入力手段と、入力手段で入力された複数の静止画像のうち、一の静止画像から検出対象物の存在確率を表わす検出対象尤度を求める識別手段と、一の静止画像と時系列に連続する他の静止画像とから検出対象物の動き情報が得られる場合には、動き情報が示す動きの検出対象物の動きとしての妥当性を表す重み係数を算出する算出手段と、算出手段で算出された重み係数に基づき、識別手段で求められた検出対象尤度を評価する評価手段と、を有することによって課題を解決する。
(もっと読む)
画像監視装置
【課題】被害者が強盗に手を縛られる身柄拘束行為を検出し、通報する画像監視装置を提供する。
【解決手段】本発明にかかる画像監視装置は、撮像部により取得された入力画像に、強盗と被害者に対応した人物領域を抽出する人物領域抽出手段と、人物領域のうち強盗犯と被害者に挟まれ、両者の腕が伸びている部分を接触領域として抽出する接触領域抽出手段と、接触領域における画素値の時間変化から、身柄拘束行為を判定する異常判定手段を有する。
(もっと読む)
監視装置
【課題】押込強盗等の不審者を高い精度で検知できる監視装置を提供する。
【解決手段】重要物を保管している所定領域内の画像を取得する撮像部と、重要物に接近する人体を検知する人体検知部と、不審者の存在を検知する不審者検知部を有し、人体検知部が人体を検知したときに撮像部が取得した画像から顔を検知した人物の周囲に顔を隠蔽した人物が存在していることを検知した場合に不審者が存在していると判定し警報出力する。
(もっと読む)
画像監視装置
【課題】監視対象物である金庫や保管庫に近づく人が検出された場合、室内が暗くて当該人が顔を隠蔽しているか否かを判定できない場合に異常とする画像監視装置を提供する。
【解決手段】画像監視装置10は、撮像部20にて取得された画像を処理し、入力画像全体の輝度値が所定未満であり、かつ変化領域抽出手段42により抽出された変化領域内の輝度が所定未満の場合あるいは、変化領域から頭部領域が抽出できない場合等に画像監視装置10が設置された室内が不審者が存在していても顔隠蔽判定処理が実行不能な暗い環境であるとして異常判定する制御手段を有する。
(もっと読む)
移動物体検出装置
【課題】オクルージョンが生じている状況下においても、複数の移動物体の存在を検出することができる移動物体検出装置を提供する。
【解決手段】
監視領域を撮影する撮像部と、撮像部の視軸と異なる光軸で監視領域に光を照射するように設置される照明部と、撮像部にて撮影した画像から移動物体を検出する画像処理部と、出力部とを少なくとも備えた移動物体検出装置であって、画像処理部は、照明部から光を照射した監視領域を撮像部にて撮影した入力画像と基準画像とを比較して基準画像から変化した変化領域を抽出する変化領域抽出手段と、変化領域の特徴を用いて変化領域を移動物体画像と影画像に分割する分割手段と、影画像の特徴を用いて複数の移動物体により生じた影であるか否かを判定して出力部に判定結果を出力する判定手段と、を有することを特徴とした。
(もっと読む)
動きオブジェクト検出装置、動きオブジェクト検出方法、及びプログラム
【課題】実時間処理に適している、動きオブジェクト検出装置、動きオブジェクト検出方法、及びプログラムを提供する
【解決手段】可変ブロックサイズ動き補償予測のブロックサイズを検出する検出部11と、検出部11が第1所定サイズのブロックを検出した場合に、当該ブロックを含む第1マクロブロックについて、第1動きベクトルを算出する算出部12と、第1動きベクトルに基づいて動きオブジェクト領域を設定し、動きオブジェクト領域に隣接する第2所定サイズのブロックを含む第2マクロブロックも動きオブジェクト領域に加える生成部13と、を備える。算出部12は、動きオブジェクト領域に隣接する、第1及び第2所定サイズのブロックを含まない第3マクロブロックについて、第2動きベクトルを算出する。生成部13は、第2動きベクトルに基づいて、第3マクロブロックを動きオブジェクト領域に加える、ことを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】限られたハードウェア資源を用いて高精度に画像解析を行う。
【解決手段】連続して撮像された複数の画像に含まれる第1の画像及び第2の画像を入力する。第1の画像及び第2の画像に対して同位置に、同サイズの検知領域を設定。第1の画像と第2の画像との間で、検知領域内の画像に差異があるか否かを判定する。差異があると判定した場合に、第1の画像と前記第2の画像とが異なることを示す通知を出力する。
(もっと読む)
ターゲット検出方法及び装置
【課題】
画像又は映像内のターゲットを検出する方法及び装置を提供する。
【解決手段】
ターゲット検出方法において、入力画像内の第1方向のエッジが検出されて、第1方向の複数のエッジを有するエッジ画像が取得される。第1方向の前記複数のエッジに従って1つ以上の候補ターゲットが生成される。入力画像内の第1方向の前記複数のエッジのうちの如何なる2つについても、その間の領域が候補ターゲットのうちの1つに対応する。
(もっと読む)
81 - 100 / 605
[ Back to top ]