
Fターム[5L096HA03]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816)
Fターム[5L096HA03]の下位に属するFターム
移動ベクトル (1,211)
Fターム[5L096HA03]に分類される特許
41 - 60 / 605
画像処理装置、画像処理方法、及びプログラム
【課題】画像上の動き領域又は静止領域の少なくとも一方を精度良く検出する。
【解決手段】平坦検出部は、入力された第1の画像を構成する各画素の画素値の分散に基づいて、第1の画像上の平坦領域を検出し、差分算出部は、第1の画像と、第1の画像の前又は後に連続する第2の画像との対応する画素の画素値どうしの差分を算出し、ノイズレベル検出部は、第1の画像上の平坦領域を構成する各画素に対応する差分の分散に基づいて、ノイズレベルを検出し、動きレベル検出部は、第1の画像を構成する各画素に対応する差分の分散とノイズレベルとの比較結果に基づいて、第1の画像上の静止領域又は動き領域の少なくとも一方を検出する。本開示は、例えば、画像を処理する画像処理装置に適用できる。
(もっと読む)
画像処理装置、画像処理システム及び画像処理方法

【課題】認識処理を軽減することを目的とする。
【解決手段】第一の撮像手段で撮像された画像を取得する取得手段と、取得手段で取得された画像から物体領域を検知する検知手段と、画像中の第一の撮像手段と第二の撮像手段との共有領域に、検知手段で検知された物体領域がある場合、共有領域の物体認識処理を画像処理装置で行うか、第二の画像処理装置で行うか否かを判断する判断手段と、判断手段において画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲に設定し、判断手段で第二の画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲から共有領域を除いた領域に設定する設定手段と、設定手段で設定された物体認識範囲に物体が写っているか否か物体認識を行う認識手段と、を有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】物体認識において使用されている認識手法をユーザに簡易にフィードバックする。
【解決手段】入力画像を取得する画像取得部と、複数の認識手法から上記入力画像に映る物体の認識手法を選択する選択部と、上記選択部により選択される認識手法を用いて、上記入力画像に映る物体を認識する認識部と、上記認識部により認識される物体と関連付けられる仮想オブジェクトを上記入力画像に重畳して表示する表示制御部と、を備え、上記表示制御部は、上記選択部により選択される認識手法に応じて、上記仮想オブジェクトの表示を変化させる、画像処理装置が提供される。
(もっと読む)
カメラポーズ推定装置、カメラポーズ推定方法及びカメラポーズ推定プログラム
【課題】移動物体が含まれる場合においても正確にカメラポーズを算出する。
【解決手段】実空間中の点の3次元座標と、3次元座標が有するテクスチャ情報と、3次元座標が移動物体上か否かを示す移動物体フラグとを3次元点IDに関連付けた3次元リスト情報を記憶する手段と、移動物体フラグが0である3次元点の対応付けを行う3次元点対応付け手段と、最適カメラポーズ情報を出力するカメラポーズ算出手段と、最適カメラポーズ情報を用いてアウトライヤ対応点リスト情報内の3次元座標がフレーム画像に射影される再射影点を決定し、該再射影点とアウトライヤ対応点リスト情報内の対応点座標から算出する動きベクトルを用いて対象の3次元座標が移動物体上か否か判定し、移動物体と判定された場合は、処理対象のアウトライヤ対応点リスト情報内の3次元点IDに対応する移動物体フラグを1に更新して、最終的な最適カメラポーズを出力する。
(もっと読む)
遠隔操作装置、遠隔操作方法及びプログラム
【課題】操作対象に対する複数の遠隔操作を適正に行う。
【解決手段】表示装置100であって、撮像部3により逐次生成される複数の画像フレームのうち、一の画像フレームに係る画像領域内で操作対象を操作するための操作指示を入力可能な操作指示範囲を設定する第1設定部6aと、操作対象の所定の操作内容と対応付けられ、当該操作を指示する操作指示部の状態を少なくとも二つ設定する第2設定部6bと、逐次生成される複数の画像フレームに基づいて、各画像フレームの操作指示範囲内から、少なくとも二つの操作指示部の状態の各々を検出する指示部検出部6cと、検出された各状態の操作指示部と対応付けられている所定の操作内容に応じて操作対象を動作させる動作制御部6eとを備えている。
(もっと読む)
対象物検出装置及びプログラム
【課題】対象物が静止していても、精度良く対象物を検出することができるようにする。
【解決手段】ウインドウ画像抽出部20によって、撮像装置12によって撮像した撮像画像からウインドウ画像を抽出する。スコア算出部22によって、歩行者の向きの分類毎の識別モデルと、ウインドウ画像とに基づいて、向きの分類毎に、歩行者らしさを示すスコアを算出する。歩行者識別部26によって、算出された向きの分類毎のスコアの分布に基づいて、ウインドウ画像が歩行者画像か否かを識別する。
(もっと読む)
入力された発話の関連性を判定するための装置および方法
【課題】オーディオまたはビジュアルの向きを用いて入力された発話の関連性を判定する。
【解決手段】ある時間間隔における発話中のユーザの顔の存在を特定する。時間間隔の間のユーザの顔に関連づけられた顔の向きの特徴を取得する。ある場合には、入力された音に対する向きの特徴を判定する。顔の向きの特徴にもとづいて時間間隔の間のユーザの発話の関連性を特徴付ける。
(もっと読む)
画像追尾装置
【課題】テンプレート内の追尾対象が小さい場合であっても、背景の誤検出に伴うテンプレートの更新精度を維持する。
【解決手段】画像追尾装置は、被写界画像を生成する撮像手段と、追尾対象の特徴を示す基準情報を生成する生成手段と、被写界画像内の画像情報が類似する類似領域を抽出する抽出手段と、基準情報に基づいて新たな被写界画像から第1追尾対象候補の位置を検出する第1検出手段と、類似領域に基づいて新たな被写界画像から第2追尾対象候補の位置を検出する第2検出手段と、第1および第2追尾対象候補の位置に基づいて、第1および第2追尾対象候補が同一の追尾対象か否かを判定する判定手段と、判定結果に基づいて、第1および第2追尾対象候補の位置の一方を追尾対象の位置として選択する選択手段と、第1および第2追尾対象候補が異なる場合には、第2追尾対象候補の位置を基準として新たな基準情報を生成する更新手段とを有する。
(もっと読む)
物体検出方法、物体検出装置および物体検出プログラム
【課題】昼夜の時間帯や天候などの環境変動に如何に関わらず、道路上の落下物を高精度で検出することが可能な物体検出装置を提供する。
【解決手段】検出波長が互いに異なる第1,第2カメラにより撮影した画像をそれぞれの取得画像として取得する第1,第2画像取得手段1,5と、各前記取得画像から道路上の物体の存在を判定する第1,第2物体存在判定手段2,6と、各前記取得画像から道路上の物体の移動状態を検出し、静止物体と移動物体とを判別する第1,第2移動体検出手段3,7と、各前記取得画像から道路上の物体の立体情報を算出する第1,第2立体情報算出手段4,8と、第1,第2物体存在判定手段2,6、第1,第2移動体検出手段3,7、第1,第2立体情報算出手段4,8それぞれにおける処理結果を統合する特徴量統合手段9と、特徴量統合手段9における処理結果の特徴量により落下物の判定を行う落下物判定手段10と、を少なくとも備える。
(もっと読む)
物体検出システム、物体検出方法、及びプログラム
【課題】小さい物体の検出と高速に移動する物体の検出とを両立することを目的とする。
【解決手段】第一の物体検出手段と第二の物体検出手段と通信手段とを有するシステムで、第一の物体検出手段は、画像から規定の物体を検出し、通信手段は、画像の解像度が異なる画像、及び第一の物体検出手段で検出された物体の画像を第二の物体検出手段に送信し、第二の物体検出手段は、異なる画像から物体とは異なる他の物体を検出することによって課題を解決する。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
接近物体検知装置及び接近物体検知方法
【課題】低い処理負荷で、自車両と接近物体の位置関係及び自車両が移動しているか否かによらず、接近物体を検知できる接近物体検知装置を提供する。
【解決手段】接近物体検知装置は、異なる時刻に撮像部(2)により取得された車両(10)の周囲を撮影した二つの画像から特徴点を抽出する特徴点抽出部(432)と、その二つの画像間で同一の物体に関する特徴点からその物体の画像上の観測移動ベクトルを求める観測移動ベクトル算出部(435)と、撮像部(2)の移動に起因する各特徴点に対応する物体の見かけの移動ベクトルの最小値を算出する最小見かけ移動ベクトル算出部(434)と、特徴点ごとに観測移動ベクトルから見かけの移動ベクトルの最小値を減じて補正移動ベクトルを算出する移動ベクトル補正部(436)と、その補正移動ベクトルに対応する物体が車両(10)に接近する移動物体か否か判定する判定部(437)とを有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】画像中に外乱が存在する場合であっても、物体と外乱の区別ができるようにする。
【解決手段】背景との差分から映像中の特徴量を抽出する画像処理装置であって、前記映像中の特徴量を検出する手段と、前記特徴量の継続する時間を検出する手段と、前記特徴量が外乱であるか否かを判定する判定手段とを備え、前記判定手段は、前記継続する時間に基づいて、安定して出現している特徴量が存在するかどうかを判定し、安定して出現している特徴量が存在しない場合は、外乱であると判定する。
(もっと読む)
行動認識装置、行動認識方法及びプログラム
【課題】実験動物の各部位の行動をより詳細に定量化する。
【解決手段】輪郭情報取得部10は、撮像部で撮像されるマウスの撮像画像に基づいて、その撮像画像におけるマウスの重心位置を基準として極座標変換されたマウスの輪郭情報を逐次取得する。変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウスの輪郭情報を、例えば、頭部、尾部、右胴体部、左胴体部等の部位単位で分割し、分割された部位毎にマウスの輪郭情報の変動に関する情報を算出する。行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウスの行動を判別する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】複数の遮蔽物が重なり合って見える環境であっても、安定した物体追跡を可能にすることを目的とする。
【解決手段】画像から追跡対象を検出し、追跡する情報処理装置であって、追跡対象を検出できなかった場合に追跡対象が物体によって遮蔽されたか否かを判定する判定手段と、判定手段で追跡対象が物体によって遮蔽されたと判定された場合、画像より物体の領域と、物体と重複する物体の領域と、を抽出する抽出手段と、抽出手段で抽出された領域を関連付け、関連付けた領域に基づいて、次に追跡対象が現れる領域を設定する設定手段と、を有することによって課題を解決する。
(もっと読む)
オブジェクト検知装置、およびオブジェクト検知プログラム
【課題】オブジェクトの検知精度を確保し、且つ、本体のコストダウンを図ったオブジェクト検知装置を提供する。
【解決手段】オブジェクト検知装置1は、画像処理部3が予め定めた第1の時間に渡って撮像装置10が監視エリアを撮像したフレーム画像から第1の時間平均画像を生成するとともに、予め定めた第2の時間に渡って撮像装置が監視エリアを撮像したフレーム画像から第2の時間平均画像を生成する。第1の時間は、第2の時間よりも長い。また、画像処理部3は、第1の時間平均画像と、第2の時間平均画像との差分画像を生成する。画像処理部3は、差分画像にあらわれたオブジェクトの形状や大きさ等から、そのオブジェクトの種類を判別する。
(もっと読む)
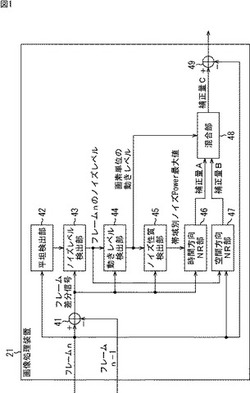
画像処理装置、および画像処理方法、並びにプログラム
【課題】動被写体領域も静止被写体領域の双方について効果的なノイズ低減を実行する装置および方法を提供する。
【解決手段】複数の連続撮影画像のブレンド処理を実行する重ね合わせ処理部は、画像の動被写体領域を検出し、画像領域単位の動被写体情報に基づいて、静止被写体領域において高いブレンド比率とし、動被写体領域において低いブレンド比率とした複数画像のブレンド処理を実行して重ね合わせ画像を生成し、さらに重ね合わせ画像に対して、動被写体情報に基づいて、動被写体領域においてより強いノイズリダクション処理を実行する。ノイズリダクション処理においては、例えば動被写体領域においてより高いノイズ低減効果を奏する前記動被写体情報に依存した係数を持つローパスフィルタを適用した画素値更新処理を実行する。これらの処理により動被写体領域、静止被写体領域の双方においてノイズリダクションのなされた画像を生成することが可能となる。
(もっと読む)
人物監視装置、人物監視方法、及びコンピュータプログラム
【課題】エリア内で動きのなくなった人物が当該エリア内に滞在していることと、当該エリアから退出したこととを正確に検出できるようにする。
【解決手段】作業者が滞在する可能性がある溶け込みエリアを設定する。アラーム通知伝文ANに含まれる作業者の数を超える数のレコードが在席管理テーブルにある場合、又は、アラーム解除伝文ACが送信されたときに在席管理テーブルのレコードがある場合であって、当該レコードの在席位置が溶け込みエリア内にある場合、当該レコードの溶け込み中フラグの値を「1」に設定する。その後、在席管理テーブルのレコード数を超える数のオブジェクトIDを含むアラーム通知伝文ANを受信すると、在席管理テーブルのレコードに含まれるIDと異なるオブジェクトIDの値に、溶け込み中フラグが「1」のレコードのIDの値を変更し、当該溶け込み中フラグの値を「0」にする。
(もっと読む)
移動体検出装置
【課題】動きベクトルを用いることなく撮影画像から移動体を検出する
【解決手段】フレームデータを取得する毎に、このフレームデータと、1フレーム前のフレームデータとを差分したフレーム差分画像データ(S40)を、ブロック画素を単位として分割し、ブロック画素毎に離散コサイン変換(DCT)を行うことにより、二次元DCT係数を算出し(S60,S70)、二次元DCT係数を蓄積して記憶する(S100)。そして、二次元DCT係数の各要素の値を配列して特徴ベクトルを構成し、フレーム差分画像データ内における同一位置のブロック画素毎に特徴ベクトルを時系列で並べて時系列ベクトルを生成する(S120)。その後、ブロック画素に移動体が写っている状態で得られる時系列ベクトルのサンプルを主成分分析して得られた主成分ベクトルに、時系列ベクトルを作用させて主成分毎の主成分得点を算出する(S130〜S150)。
(もっと読む)
立体物検知装置および立体物検知方法
【課題】静止物が接近物であるとの誤判定を低減することができる「立体物検知装置および立体物検知方法」を提供すること。
【解決手段】移動体に配置された単一の撮像手段2と、撮像手段2の撮像画像に基づいて、立体物の検出および当該立体物に対応する検出画像の作成を繰り返す立体物検出手段4と、最新の検出画像と前回の検出画像との差分面積に基づいて接近物判定を行う接近物判定手段6とを備え、接近物判定手段6は、差分面積が増加した場合であっても、このことのみを以て直ちに立体物が接近物であると判定せずに、移動体が移動中ではないこと、または、移動体が移動中であるが差分面積の変化量が閾値変化量以上ではないことが判明した上で接近物であると判定すること。
(もっと読む)
41 - 60 / 605
[ Back to top ]