
Fターム[5L096HA03]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816)
Fターム[5L096HA03]の下位に属するFターム
移動ベクトル (1,211)
Fターム[5L096HA03]に分類される特許
21 - 40 / 605
物体検出方法
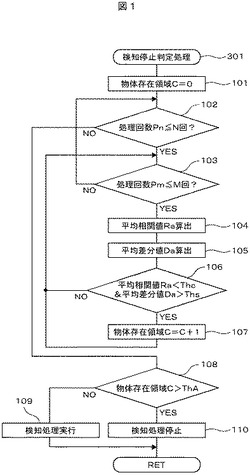
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法

【課題】移動体を高い精度で検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】検出ブロック設定部107は、撮像画像上で複数の画素で構成される任意の大きさの検出ブロックを複数設定する。評価値算出部109は、任意の時点tの撮像画像上で、設定した各検出ブロックが移動体の候補領域であるか否かを評価する評価値を検出ブロック毎に算出する。選択部110は、算出された評価値に基づいて、候補領域であると評価された1又は複数の検出ブロックを選択する。移動体領域検出部112は、選択した検出ブロックの撮像画像上の位置及び大きさに基づいて、撮像画像上の移動体領域を検出する。
(もっと読む)
画像認識装置
【課題】本発明は、ハードウェアの規模を小さくでき、ニューロ演算を用いた画像認識処理をリアルタイムで実行することができる技術を提供することを課題とする。
【解決手段】画像認識装置100は、車載カメラが撮影した動画像データのフレーム30Fに歩行者が撮影されているか否かを判定する。前処理部2は、フレームの中から検出ブロックを決定し、フレームから検出ブロックに対応するブロック画像データを切り出す。ブロック画像データから、検出ブロックのサイズよりも小さい所定サイズのブロックデータ33が作成される。ニューロ演算部4は、ブロックデータ33をニューロ演算して出力シナプス34を算出する。後処理部6は、出力シナプス34に基づいて、検出ブロック内に歩行者がいるか否かを判定する。後処理部6は、歩行者が検出された場合、歩行者が検出された検出ブロックをフレーム30Fの上に重ねた結果データ35を作成する。
(もっと読む)
被写体追跡プログラムおよび被写体追跡装置
【課題】時系列に入力されるフレーム画像において適切に主要被写体を追跡すること。
【解決手段】被写体追跡プログラムは、時系列で入力される各フレーム画像の色情報および輝度情報に基づいて複数の要素画像を生成する要素画像生成処理と、複数の要素画像をそれぞれ2値化して複数の2値化要素画像を生成する2値化要素画像生成処理と、複数の2値化要素画像を論理積演算する論理積演算処理と、論理積演算後の2値論理積画像に対するラベリング処理に基づいて、各フレーム画像における主要被写体の位置を特定する特定処理と、特定処理で特定された範囲と所定範囲との論理積演算に基づいて特定された範囲を縮小する縮小処理と、前フレーム画像において縮小処理で縮小された範囲を膨張させて所定範囲を得るモルフォロジー処理と、をコンピュータに実行させる。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】動体検出部は、現画像において、背景とは異なる部分の画像である動体を検出し、一時停止判定部は、動体が、所定の一定時間以上停止しているかどうかを判定する。信頼度処理部は、一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とを用いて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度を求める。不動体検出部は、不動体信頼度に基づいて、現画像から、不動体を検出する。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法
【課題】人手を介さずに非車両パターンの収集を自動的に行うとともに収集した非車両パターンを用いて車両などの移動体を高精度に検出することができる移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】負例特徴量算出部108は、時刻tから所定時間Ts経過後の時刻(t+Ts)での撮像画像上で時刻tでの撮像画像上で特定された移動体候補領域の対応領域の画素値に基づく特徴量を算出する。負例類似度算出部109は、移動体候補領域の特徴量と対応領域の特徴量との類似度を算出する。負例登録部110は、算出した類似度が所定の閾値S以上である場合、移動体候補領域を非車両パターンとして登録する。
(もっと読む)
画像処理装置およびこれを備えた原稿読取システム
【課題】画像処理装置において、ユーザが原稿を手で押さえて読み取り時の紙面を正常に保持しながら、特定の操作を必要とすることなく、所望のタイミングで撮影画像を記録可能とする。
【解決手段】撮影画像から原稿の輪郭成分を抽出するページ輪郭検出部32と、撮影画像において特定領域A1、A2を設定する特定領域設定部33と、特定領域においてユーザの手指を認識する指認識部31と、指認識部にて認識された手指の動きを検出する動き検出部35と、動き検出部の検出結果に基づき、ユーザからの動作指令が与えられたと判定した場合に、撮影画像を記録する画像記録部36とを備え構成とする。
(もっと読む)
画像処理ユニット、および画像処理プログラム
【課題】生成する背景差分画像の精度の低下を抑えるとともに、装置本体にかかる処理負荷の増大も抑え、装置本体のコストダウンを図った画像処理ユニットを提供する。
【解決手段】メモリ4aは、代表画素毎に、その代表画素の特徴と、その代表画素の画素値の発生頻度をモデル化した背景モデルと、を関連付けて記憶する。画像処理部4は、画像入力部3に入力されたフレーム画像の画素毎に、その画素の特徴に対応する代表画素の背景モデルを探索する。画像処理部4は、この探索で得た背景モデルに基づき、背景が撮像されている背景画素、または背景でない物体が撮像されている前景画素のいずれであるかを判定する。画像処理部4は、画像入力部3に入力されたフレーム画像のいずれかの画素において、その画素が背景画素、または前景画素のいずれであるかの判定に用いた背景モデルを、この背景モデルを用いた画素の画素値に基づいて更新する。
(もっと読む)
動き画像領域判定装置またはその方法
【課題】 簡易な構成で矩形動き画像領域を判定する。
【解決手段】 動き単位ブロック判断手段5は、各単位ブロックについて、比較対象のフレームの同じ位置の単位ブロックの代表値が閾値を超える場合には、動き単位ブロックとする。動き列ブロック決定手段7は、ある単位ブロックと同じ列に属する単位ブロックの集合を列ブロックとして定義し、各列ブロックに動き単位ブロックが存在する場合には動き列ブロックとして決定する。動き行ブロック決定手段9は、各行ブロックに動き単位ブロックが存在する場合には動き行ブロックとして決定する。第1矩形動き画像領域決定手段11は、動き行ブロックおよび動き列ブロックの双方に属する単位ブロックで特定される矩形領域を矩形動き画像領域として決定する。
(もっと読む)
動き画像領域判定装置またはその方法
【課題】 簡易な構成で矩形動き画像領域を判定する。
【解決手段】 動き単位ブロック判断手段5は、各単位ブロックについて、比較対象のフレームの同じ位置の単位ブロックの代表値が閾値を超える場合には、動き単位ブロックとする。動き列ブロック決定手段7は、ある単位ブロックと同じ列に属する単位ブロックの集合を列ブロックとして定義し、各列ブロックに動き単位ブロックが存在する場合には動き列ブロックとして決定する。動き行ブロック決定手段9は、各行ブロックに動き単位ブロックが存在する場合には動き行ブロックとして決定する。第1矩形動き画像領域決定手段11は、動き行ブロックおよび動き列ブロックの双方に属する単位ブロックで特定される矩形領域を矩形動き画像領域として決定する。
(もっと読む)
車両接近物検知装置
【課題】車載カメラの撮影画像に対して画像認識処理を行って車両に接近する物体を検出する技術において、従来よりも画像認識処理の処理負荷を低減する。
【解決手段】車両1の作動状態を示す車両信号が、後退中を示している場合、範囲Aを物体検出範囲として選択し、停止を示している場合、範囲Bを物体検出範囲として選択し、ウインカが作動している場合、ウインカの方向に応じて範囲BまたはCを物体検出範囲として選択し、選択した物体検出範囲内に限定して画像認識処理を行うことで、車両1に接近する物体の検出を試みる。
(もっと読む)
情報処理装置
【課題】人体の動きに応じて情報処理装置を操作するときの操作性を改善する。
【解決手段】カメラ18は、操作者の人体の少なくとも一部の画像を取得し、取得した画像の画像データを生成する。第1特徴領域情報生成部122Aは、画像データから、人体の特徴部位を含む第1特徴領域を検出し、第1特徴領域を定義する第1特徴領域情報を生成する。第2特徴領域検出部122Bは、第1特徴領域情報に基づいて、仮想空間において、第1特徴領域に対応する第2特徴領域を定義する第2特徴領域情報を生成する。複数の操作コマンド生成部124Bは、仮想空間内の複数の部分空間に対応した操作コマンドを生成する。選択部124Aは、第2特徴領域情報に基づき、複数の操作コマンド生成部124Bの中から1つを選択する。
(もっと読む)
不審人物検知方法および装置、異常事象検知方法および装置
【課題】不審人物や異常事象を短時間の観察から精度良く検知できる不審人物(異常事象)検知方法および装置を提供する。
【解決手段】ルール登録部15は、不審人物の行動シーケンスを表したシーケンス長さ別の行動シーケンスルールと、不審人物の移動経路を表した経路長さ別の移動経路ルールとを記憶し、処理部12は、カメラ11画像内の人物を追尾し、追尾人物の動作を時系列に並べた行動シーケンスデータと、追尾人物の所在位置を時系列に並べた移動経路データとを繰り返し更新し、追尾人物の動作が変化した場合に、シーケンス長さ毎に、行動シーケンスルールと一致する行動シーケンスが行動シーケンスデータに含まれるかを調べて該当時にスコアを上昇させ、追尾人物の所在位置が変化した場合に、経路長さ毎に、移動経路ルールと一致する移動経路が移動経路データに含まれるかを調べて該当時にスコアを上昇させ、スコアが閾値を超えると不審人物と判定する。
(もっと読む)
物体検出装置
【課題】対象物の検出処理を高速化することができる物体検出装置を提供する。
【解決手段】検出処理部4は、撮像装置10で撮影された画像信号の各フレームの画像を、複数のサイズの探索窓を用いて走査することにより、各フレームの画像に含まれている対象物を検出する。探索窓生成部5は、探索窓のサイズを設定し、検出処理部4が対象物を検出した際の対象物の位置情報に対応させて、対象物を検出した際に用いた探索窓のサイズを保持部6に保持させる。検出処理部4は、保持部6に保持された位置情報が示す位置を走査する際には、複数のサイズの全てを用いることなく、位置情報に対応して保持されたサイズを基準とした限定したサイズを用いる。
(もっと読む)
追尾装置、追尾方法及びプログラム
【課題】移動物体の速度に関係なく、長時間、より正確に移動体の追尾を行うことを目的とする。
【解決手段】特徴量に対応したパラメータに基づいて撮像手段で撮像された画像中の動体を検出する物体検出手段と、カメラの姿勢を制御する姿勢制御手段と、動体の速度に応じて物体検出手段のパラメータを動的に変更する制御手段と、を有することによって課題を解決する。
(もっと読む)
画像認識装置
【課題】自車両の走行道路の状態に拘らず、歩行者の検知漏れや無駄な検知動作をなくすことができる探索領域を設定でき、歩行者の検知性能を向上させることができる画像認識装置の提供。
【解決手段】算出部22は、自車両の旋回に関する情報を含む情報として赤外線カメラ30から前方画像50を取得し、前方画像50の計算領域66のオプティカルフローを計算することで、方向ベクトルを算出し、その方向ベクトルの水平方向成分を走行道路のカーブの方向に関する情報として算出する。そして、探索領域設定部24は、水平方向成分に基づいてカーブの方向を判定し、歩行者を表す画像58を探索するための探索領域52を、探索領域52の前方画像50における大きさはそのままに、判定したカーブの方向に向けて移動させた位置に設定する。そして、認識部28がその位置に設定された探索領域52内の歩行者を表す画像58を検知する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】作品として楽しめる動画を簡単に作成できる画像処理装置および画像処理方法を提供する。
【解決手段】主被写体を連続撮影し、この連続撮影した複数の画像の中から画像を用いて、動かない部分を組み合わせて背景画像を合成する。また、連続撮影した複数の画像から主被写体の大きさの変化と移動方向を検出し、この情報に基づいて、特定画像に写っている対象物について連続画像を生成し、これを背景画像に合成することにより、アニメーション化した画像を生成する。
(もっと読む)
画像解析装置、画像解析方法、画像解析プログラム及び記録媒体
【課題】解析対象の動きをより正確に解析し、解析結果に対する把握性を向上させる装置及び方法等を提供する装置及び方法等を提供する。
【解決手段】画像解析装置SSは、矩形領域20に存在するベクトル情報を抽出し、前記抽出された所定範囲内に存在するベクトル情報に含まれる方向に基づいて、当該所定範囲内に存在するベクトル情報の一又は複数の代表的な方向を算出する。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】画像上の動き領域又は静止領域の少なくとも一方を精度良く検出する。
【解決手段】平坦検出部は、入力された第1の画像を構成する各画素の画素値の分散に基づいて、第1の画像上の平坦領域を検出し、差分算出部は、第1の画像と、第1の画像の前又は後に連続する第2の画像との対応する画素の画素値どうしの差分を算出し、ノイズレベル検出部は、第1の画像上の平坦領域を構成する各画素に対応する差分の分散に基づいて、ノイズレベルを検出し、動きレベル検出部は、第1の画像を構成する各画素に対応する差分の分散とノイズレベルとの比較結果に基づいて、第1の画像上の静止領域又は動き領域の少なくとも一方を検出する。本開示は、例えば、画像を処理する画像処理装置に適用できる。
(もっと読む)
歩行者検出装置
【課題】監視エリアを所定時間毎に撮影して取得した画像を処理して、監視エリア内の歩行者を検出するときの検出精度を高める。
【解決手段】監視エリア100内を歩行者101が矢印102の方向に移動する。歩行者101の足は片方ずつ交互に動き、交互に静止する。領域103、104、105内の静止部分の下端の中心間距離は歩幅に対応し、領域103、104、105内の静止部分の発生周期は歩行周期に対応する。背景差分により異物画像201を検出し、フレーム間差分により移動物体画像202を検出する。背景差分とフレーム間差分との差分により、異物画像中の静止領域画像204を抽出する。隣り合う静止領域画像204の下端の中心間距離、発生周期が、歩幅、歩行周期に対応すれば、歩行者であると判定する。
(もっと読む)
21 - 40 / 605
[ Back to top ]