
Fターム[5L096HA05]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 追尾 (769)
Fターム[5L096HA05]に分類される特許
21 - 40 / 769
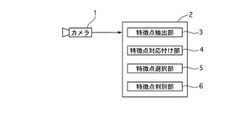
特徴点判別装置
【課題】 抽出した特徴点が同一平面上に存在するか否かを精度よく判別できる特徴点判別装置を提供する。
【解決手段】 車両に搭載され、周囲環境を画像として撮像する車載カメラ1と、撮像された画像から特徴点を抽出する特徴点抽出部3と、抽出された特徴点の時間的対応を求める特徴点対応付け部4と、抽出された特徴点の中で所定の位置関係にある3つの特徴点を選択する特徴点選択部5と、選択された3つの特徴点が同一平面上に存在するか否かを判別する特徴点判別部6と、を備え、特徴点判別部6は、選択された特徴点の時間的対応に基づいて、選択された3つの特徴点によって形成される画像上の距離の比が時間的に不変である場合に、選択された3つの特徴点が全て同一平面上に存在すると判別する。
(もっと読む)
モバイルモーションキャプチャカメラ

【課題】複数の俳優を収容することのできるボリューム内で身体動作と顔動作を共に同時に取り込むことを可能にするモーションキャプチャシステムを提供する。
【解決手段】動作を取り込むシステム(10)は、少なくとも1つの移動物体上の複数の地点を定義するマーカを有する少なくとも1つの移動物体を含むように構成されたモーションキャプチャボリューム(30)と、モーションキャプチャボリューム(30)内で可動となるように構成された少なくとも1つのモバイルキャプチャカメラ(16)と、少なくとも1つのモバイルモーションキャプチャカメラ(16)と結合され、少なくとも1つの移動物体の運動のデジタル表現を生成するモーションキャプチャプロセッサ(12)とを備える。
(もっと読む)
被写体3次元領域推定方法およびプログラム
【課題】同期撮影された複数のカメラ映像を統合的に扱うことで、被写体3次元位置推定の精度を向上させる。
【解決手段】初期フレームにおける被写体の3次元世界座標と、複数のカメラで撮影された複数フレームのカメラ画像とから、前記初期フレームにおける被写体の3次元世界座標を特定平面上のXY座標に射影し、前記特定平面上の被写体のXY座標を時間軸情報に基づき推定し、前記特定平面上の被写体のXY座標をカメラ間情報に基づき評価することで、後続フレームにおける被写体の3次元世界座標を推定する。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
監視装置、その方法、及び、そのプログラム
【課題】監視対象物が移動しても確実に追従できる監視装置を提供する。
【解決手段】監視対象物を指し示す指示部22と、前記監視対象物を撮像して時系列の画像を取得するカメラ12と、前記時系列の画像から複数の特徴点を抽出すると共に、前記各特徴点の移動量を算出し、予め設定された基準移動量より前記移動量が大きな特徴点の第1の集合の移動先位置Bを予測する予測部14と、前記時系列の画像間の差分に基づいて変化領域を抽出し、前記変化領域の重心位置Oを検出する検出部16と、前記平均移動量が第1の閾値と比較して大きい場合には前記移動先位置Bを指示位置と設定し、小さい場合には前記重心位置Oを指示位置と設定する判定部18と、前記指示部が前記指示位置を指し示すように前記指示部を制御する制御部20とを有する。
(もっと読む)
移動体追跡装置、移動体追跡方法及びプログラム
【課題】距離画像によって構成される動画像を解析し、移動体を追跡する場合において、移動体同士が接触或いは重複していたとしても、各移動体を区別して追跡することができる移動体追跡装置等を提供する。
【解決手段】移動体追跡装置1は、距離情報から距離画像を生成し(S1)、距離画像の2値化、ノイズ除去を行い(S2)、撮影時刻が隣接する2つの距離画像から各々移動体領域を1つずつ特定し、特定された2つの移動体領域の組ごとに重複領域を抽出し、重複領域の面積情報が所定値以上であった場合には移動体領域の組が同一の移動体であると判定し(S3)、同一の移動体であると判定された移動体領域の組について、移動体の移動位置を追跡する(S4)。
(もっと読む)
オブジェクト追跡装置
【課題】ズーム処理によって対象オブジェクトのサイズが変化しても、高速かつ高精度に対象オブジェクトを追跡することができるオブジェクト追跡装置を提供する。
【解決手段】探索領域設定部9は、現時点のフレーム画像のズーム倍率が前時点のフレーム画像のズーム倍率と異なる場合には、前時点のフレーム画像におけるオブジェクト領域、前時点のフレーム画像におけるズームの中心座標、前時点のフレーム画像のズーム倍率と現時点のフレーム画像のズーム倍率との比に基づいて、現時点のフレーム画像におけるオブジェクトの探索領域を設定する。正規化部10は、現時点のフレーム画像に含まれるオブジェクトの探索領域の画像を固定サイズに正規化する。マッチング部11は、正規化された探索領域の画像の中から、テンプレート画像と類似するオブジェクト領域を検索する。
(もっと読む)
移動物体追跡装置及び参照点追跡方法
【課題】移動物体上のある点に対して移動物体の移動速度方向から所定角度だけ回転した方向に所定長離れた点の位置を精度良く把握可能な移動物体追跡装置を提供する。
【解決手段】移動物体の所定の部位を画像追跡点として撮像し、取得した画像追跡点の画像データより、追跡のための追跡原点座標と移動物体の画像追跡点の座標との差異を表す追跡誤差を得る。この追跡誤差に基づいて、追跡角速度に移動物体に対する撮像器の追従遅れを補正した視軸角速度を算出する。同時に、移動物体との間の相対距離と、移動物体追跡装置自身の移動速度を計測する。得られた視軸角速度と相対距離と移動物体追跡装置自身の移動速度に基づいて、画像追跡点から移動物体の移動速度方向から所定の角度だけ回転した方向に所定長さだけ離れた参照点を追跡するための参照点追跡角度を算出する。
(もっと読む)
オブジェクト検出装置
【課題】複数個のオブジェクトを高速に検出することが可能なオブジェクト検出装置を提供する。
【解決手段】分割部2は、複数個の検出対象オブジェクトについての全検出処理をM個に均等に分割する。設定部3は、連続して入力されるM個のフレーム画像のうちの各々のフレーム画像での検出処理を、分割されたM個の検出処理のうちの1つに設定する。検出部6は、各フレーム画像において、設定された検出処理を実行する。選択部5は、M個のフレーム画像のうちのいずれかで、いずれかのオブジェクトを検出した場合に、複数個の検出対象オブジェクトの中から検出されたオブジェクトと同一および関連する1以上のオブジェクトを選択する。分割部2、設定部3、検出部6は、選択されたオブジェクトについて再分割、再設定、再検出を行なう。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
近距離動作のトラッキングのシステムおよび方法
【課題】ユーザの手および指の動きをトラッキングし、トラッキングデータを用いて装置とのユーザの相互作用を制御するための高度な方法を提供する。
【解決手段】近距離の対象物をトラッキングするためのシステムおよび方法において、奥行きセンサ110を用いて、ユーザの手および指またはその他の対象物の近距離の奥行き画像が取得される。奥行きセンサから得られる奥行き画像データを用いて、ユーザの手および指またはその他の対象物の動きが特定されてトラッキングされる。そして、ユーザの手および指または他の対象物の位置や動きを用いて、ユーザは、画面に表示される対象物と相互作用することができる。
(もっと読む)
被写体追跡プログラムおよび被写体追跡装置
【課題】時系列に入力されるフレーム画像において適切に主要被写体を追跡すること。
【解決手段】被写体追跡プログラムは、時系列で入力される各フレーム画像の色情報および輝度情報に基づいて複数の要素画像を生成する要素画像生成処理と、複数の要素画像をそれぞれ2値化して複数の2値化要素画像を生成する2値化要素画像生成処理と、複数の2値化要素画像を論理積演算する論理積演算処理と、論理積演算後の2値論理積画像に対するラベリング処理に基づいて、各フレーム画像における主要被写体の位置を特定する特定処理と、特定処理で特定された範囲と所定範囲との論理積演算に基づいて特定された範囲を縮小する縮小処理と、前フレーム画像において縮小処理で縮小された範囲を膨張させて所定範囲を得るモルフォロジー処理と、をコンピュータに実行させる。
(もっと読む)
エッジ検出装置およびそのプログラム
【課題】照明等の撮影条件が変化した場合であっても、映像を構成するフレーム画像のそれぞれからエッジを正確に検出することができるエッジ検出装置およびそのプログラムを提供する。
【解決手段】エッジ検出装置1は、第1閾値および第2閾値を用いて映像を構成するフレーム画像ごとのエッジ点を検出するエッジ検出手段20と、現フレーム画像のエッジ点から当該エッジ点とエッジ勾配強度およびエッジ方向が類似する前フレーム画像のエッジ点を追跡するエッジ追跡手段40と、エッジ検出手段20によって検出されたエッジ点を分布化してガウス混合モデルを生成するとともに、エッジ追跡手段40によって追跡が成功したエッジ点を追加してガウス混合モデルを更新するモデル生成・更新手段50と、生成または更新されたガウス混合モデルの平均値および標準偏差から第1閾値および第2閾値を算出する閾値算出手段60と、を備えている。
(もっと読む)
身長推定装置、身長推定方法、及び身長推定プログラム
【課題】画像上で人物の足元位置が隠蔽されていても当該人物の身長を精度よく推定する。
【解決手段】撮像部130は、対象人物を含む画像を時系列で撮像する。頭部検出部141は、時系列で撮像された画像それぞれから対象人物の頭部を検出する。足元位置推定部143は、検出された頭部を用いて、時系列で撮像された画像それぞれから対象人物の足元位置を仮定身長毎に推定する。実空間位置推定部145は、推定された足元位置を用いて、対象人物の実空間上の位置を仮定身長毎に時系列で推定する。身長推定部147は、仮定身長毎に、推定された実空間上の時系列の位置を用いて人間らしい移動軌跡を作成し、最も人間らしい移動軌跡が作成された仮定身長を対象人物の身長に推定する。
(もっと読む)
動画提示装置
【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法
【課題】人手を介さずに非車両パターンの収集を自動的に行うとともに収集した非車両パターンを用いて車両などの移動体を高精度に検出することができる移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】負例特徴量算出部108は、時刻tから所定時間Ts経過後の時刻(t+Ts)での撮像画像上で時刻tでの撮像画像上で特定された移動体候補領域の対応領域の画素値に基づく特徴量を算出する。負例類似度算出部109は、移動体候補領域の特徴量と対応領域の特徴量との類似度を算出する。負例登録部110は、算出した類似度が所定の閾値S以上である場合、移動体候補領域を非車両パターンとして登録する。
(もっと読む)
情報処理装置、物体追跡方法および情報処理プログラム
【課題】誤った追跡対象の早期削除と、正しい追跡対象が一時的に隠れている状況での追跡維持とを両立させ、追跡対象数が変化する場合にも正しく物体追跡を行なうこと。
【解決手段】画像中の物体を検出する物体検出手段と、追跡対象とすべき追跡対象物体の情報を記憶する記憶手段と、物体検出手段が検出した検出物体と追跡対象物体との対応度を決定する対応度決定手段と、対応度を用いることにより、検出物体が追跡対象物体であるのか、追跡対象物体が画像中において一時的に隠れているのか、または、追跡対象物体の情報を記憶手段から削除すべきなのかを判定する判定手段と、を備えた情報処理装置。
(もっと読む)
オブジェクト追跡方法及びオブジェクト追跡装置
【課題】オブジェクト追跡方法及び装置を提供する。
【解決手段】かかる方法は、入力された初期深度画像への3次元の連通域解析を行い、初期深度画像の連通域リストを取得する連通域取得ステップと、初期深度画像におけるオブジェクトの既知の現位置からオブジェクト所在の連通域を決定するとともに、該連通域に対応する画像部分におけるn個特徴点(nは自然数)を決定する初期オブジェクト決定ステップと、前記初期深度画像後に入力される後続の深度画像の3次元の連通域解析を行い、前記後続の深度画像の連通域リストの各候補連通域から、前記オブジェクト所在のオブジェクト連通域を識別する追跡ステップと、前記追跡ステップで識別されたオブジェクト連通域から、前記n個特徴点を追跡し、前記オブジェクトの現位置を更新するオブジェクト位置決めステップとを有する。
(もっと読む)
被写体追跡装置及びその制御方法
【課題】 基準画像と入力画像との相関度に基づく被写体追跡を行う被写体追跡装置において、被写体の見えが変化する状況における被写体追跡の精度を向上させる。
【解決手段】 入力画像中の領域のうち、登録された第1および第2の基準画像の各々と最大相関度を有する領域を求める。そして第1の基準画像についての最大相関度と第2の基準画像についての最大相関度とを比較して、特定の被写体の領域を最大相関度を有する領域の中から判定する。そして、特定の被写体の領域を判定すると、判定した特定の被写体の領域に基づいて第2の基準画像を更新する一方、第1の基準画像は、更新しない。
(もっと読む)
薬剤計数装置およびその方法
【課題】薬包の印字に影響されることなく、正確に薬剤を計数可能な薬剤計数装置を提供する。
【解決手段】揺動部により揺動されている薬包に封入された薬剤を撮像した動画像を構成する複数枚のピクチャにわたる、各々がピクチャを構成する1個以上の画素からなるブロックの動きの軌跡である複数の移動軌跡について、2点間距離と、測地距離とを算出する距離算出部104と、任意の移動軌跡間の2点間距離の時間変化および測地距離の時間変化に基づいて、各移動軌跡が薬剤と薬剤とが接触する部分である節の移動軌跡である度合いを示す節らしさ特徴量を算出する節らしさ算出部105と、節らしさ算出部105が算出した節らしさ特徴量に基づいて、薬包に封入された薬剤を計数する分離計数部107とを備える。
(もっと読む)
21 - 40 / 769
[ Back to top ]