
Fターム[5L096HA05]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 追尾 (769)
Fターム[5L096HA05]に分類される特許
161 - 180 / 769
ビデオデータ中のターゲットの追跡方法
移動軌跡算出方法およびその装置、ならびに領域分割方法
移動軌跡算出装置は、動画像を構成する時間的に連続した複数枚の画像を受け付ける画像受付部(101)と、画像受付部(101)において受け付けられた各画像について、互いに階層の異なる空間的に大きいサイズの小領域が空間的に小さいサイズの小領域を包含するように、階層的に領域分割を行うことにより、複数の階層において小領域を生成する階層小領域生成部(103)と、ある画像における小領域に最も類似する小領域をある画像とは異なる画像において複数の階層をまたがって、かつ1枚以上の画像にわたって探索することによりある画像における小領域の動画像中での移動軌跡を代表移動軌跡として算出する代表移動軌跡算出部(104)とを備える。 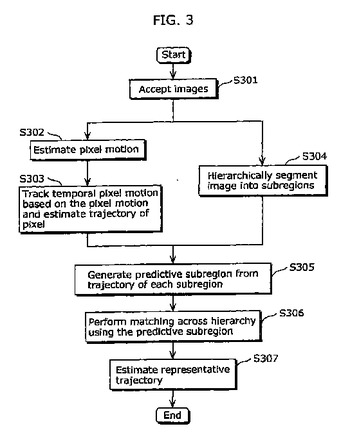 (もっと読む)
(もっと読む)
感情推定装置および感情推定方法
【課題】人間のコミュニケーションの場の感情であるグループ感情を推定することが可能な感情推定装置を提供する。
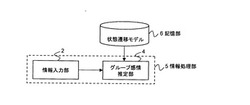
【解決手段】複数人で構成される集団の感情を示すグループ感情を推定する感情推定装置であって、状態遷移モデルを記憶する記憶部と、集団を構成する個人の感情に関する情報をセンシングにより取得し、個人感情を推定する情報入力部と、情報入力部から取得した個人感情の情報と状態遷移モデルとからグループ感情を推定するグループ感情推定部とを有し、状態遷移モデルは、個人感情とグループ感情の時系列遷移を扱うものであり、連続的にそのモデルの状態が更新されるものである。
(もっと読む)
移動物体追跡装置

【課題】監視空間内を移動する複数の移動物体が接近した場合に追跡対象の取り違えが起こる可能性がある。
【解決手段】監視空間を撮影した時系列の監視画像にて移動物体の像を検出する。注目物体に接近する物体がある場合は(S54)、注目物体の色ヒストグラムのうち複数時刻で共通する色からなる特徴不動範囲と、接近物体の複数時刻の色ヒストグラムのうち一度でも現れた色からなる特徴変動範囲とを比較する(S55)。そして、注目物体の特徴不動範囲のうち接近物体の特徴変動範囲と重複しない範囲で、注目物体の追跡特徴を設定する(S57)。このように時系列の監視画像に基づいて物体相互の位置関係を常時、判断し、接近状態では追跡特徴を接近相手とは弁別可能なものにする。
(もっと読む)
移動物体追跡装置
【課題】監視空間内を移動する複数の移動物体が接近した場合に追跡対象の取り違えが起こる可能性がある。
【解決手段】監視空間を撮影した時系列の監視画像の任意時刻にて注目物体の像に対応する注目領域を設定する(S1)。注目領域から注目物体の像についての互いに異なる複数の注目特徴を抽出する(S2)。各時刻の監視画像から各注目特徴を有する特徴領域を検出し(S5)、注目特徴毎に、注目物体の位置に対応した特徴領域を追跡領域として設定し、それ以外の特徴領域をダミー領域として設定する(S6)。過去の特徴領域の位置に基づいて当該特徴領域の現時刻の移動先を予測する(S7)。予測された移動先に基づいて注目特徴毎に追跡領域とダミー領域との接近の発生を推定し、当該接近が生じないと推定された注目特徴の追跡領域の位置に基づいて注目物体の位置を判定する(S11)。
(もっと読む)
対象物追跡装置、対象物追跡方法、および対象物追跡プログラム
【課題】誤追跡の可能性を更に低減することができる対象物追跡装置を提供すること。
【解決手段】パーティクルフィルタを用いて映像に映し出された対象物の位置を追跡する対象物追跡装置300であって、対象物の位置の候補を示すパーティクルを複数生成し、対象物の画像の特徴量とパーティクルのそれぞれの画像の特徴量とを算出する特徴量算出部340と、パーティクル毎に、そのパーティクルの画像の特徴量と対象物の画像の特徴量との類似度から、そのパーティクルが対象物の位置であることの尤度を算出する尤度算出部350と、算出されたパーティクルの尤度に基づいて、対象物の位置を推定する位置推定部360と、対象物が複数存在し、これらに対応して推定される複数の位置が重なるとき、尤度を補正する尤度補正部390とを有する。
(もっと読む)
動線連結方法,装置及び動線連結プログラム
【課題】複数の動線認識システムでそれぞれ認識される動線のなかから同一移動体に対する動線を精度よく連結できるようにする。
【解決手段】第1の動線データベースに記憶された各動線データの中から第1の画像監視エリア内に位置する移動体の動線データを選択する。そしてこの動線データに対応する移動体が第1の画像監視エリア内に位置している期間のカメラ画像を表示させる。第2の動線データベースに記憶された各動線データの中から第2の画像監視エリア内に位置する移動体の動線データを選択する。そして、この動線データに対応する移動体が第2の画像監視エリア内に位置している期間のカメラ画像を表示させる。連結宣言を受け付けると、第1の動線データベースから選択された動線データの始点から第2の動線データベースから選択された動線データの終点までの動線データを生成する。
(もっと読む)
移動物体追跡システムおよび移動物体追跡方法
【課題】 複数の移動物体が複雑な動きをした場合であっても、良好な追跡結果を得ることができる移動物体追跡システムおよび移動物体追跡方法を提供する。
【解決手段】 人物追跡システムは、カメラ1で撮影した動画を画像インターフェース22により入力し、入力した各画像から追跡対象となる全ての人物の顔を顔検出部26により検出し、第1の画像から検出された顔と前記第1の画像に連続する第2の画像で検出される顔のうち同一人物の顔とを顔追跡部27により対応付けすることにより人物を追跡し、追跡処理の処理結果としてどのような基準で移動物体の追跡結果を出力するかを示すパラメータを設定し、設定されたパラメータに基づいて選別された移動物体の追跡結果を管理する。
(もっと読む)
動線連結方法,装置及び動線連結プログラム
【課題】複数の動線認識システムでそれぞれ認識される動線のなかから同一人物に対する動線どうしを連結できるようにする。
【解決手段】連結元動線の終点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。連結先動線の始点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。各人物画像との同定処理を行う。そして、同一人物であることが確認されると、連結元動線に連結先動線を連結する。
(もっと読む)
動線関連付け方法、装置及びプログラム
【課題】複数の動線認識システムでそれぞれ認識される動線のなかから同一移動体に対する動線どうしを関連付けられるようにする。
【解決手段】第1の動線データベースから第1の画像監視エリア内に位置した移動体の動線データを選択し、この動線データの移動体が第1の画像監視エリア内に位置する時点のカメラ画像データを第1の画像データベースから選択して、このカメラ画像データから移動体画像を抽出する。第2の動線データベースから第2の画像監視エリア内に位置する移動体の動線データを選択し、この動線データの移動体が第2の画像監視エリア内に位置する時点のカメラ画像データを第2の画像データベースから選択し、このカメラ画像データから移動体画像を抽出する。両移動体画像を照合して各画像の移動体が同一か判定し、同一であると判定されると、両動線データの関連付けを行う。
(もっと読む)
二次元運動に基づいて相対的三次元速度及び加速度投射関数を推定するデータ・マイニング方法及びシステム
【課題】
【解決手段】 空間の第1の画像から空間の第2の画像にデータを変換するために使用される変換行列を決定する方法が開示される。この方法は、空間を監視するビデオカメラから画像データを受け取る段階であって、ビデオカメラは、空間内を運動するオブジェクトの画像データを生成する段階と、画像データからカメラの視野に対するオブジェクトの時空的位置を決定する段階とを含む。この方法は、更に、オブジェクトの時空的位置に基づいてカメラの視野に対するオブジェクトの運動の観察属性を決定する段階を含み、観察属性は、カメラの視野に対するオブジェクトの速度と、カメラの視野に対するオブジェクトの加速度の少なくとも一方を含む。この方法は、また、オブジェクトの運動の観察属性に基づいて変換行列を決定する段階を含む。
(もっと読む)
画像認識装置および方法
【課題】画像から検出された被写体がデータベースに登録されていない被写体であることをより正確に判別できるようにする。
【解決手段】画像認識装置は、被写体を撮影した画像またはこの画像から得られる当該被写体に関する画像特徴と撮影状態を、登録画像情報として当該被写体に関連付けて登録したデータベースを有する。画像認識装置は、処理対象の画像から特定の被写体画像を検出し、被写体画像と登録画像情報における被写体の撮影状態の一致度と画像特徴の類似度とを算出し、類似度と一致度とに基づいて、被写体画像の被写体が登録画像情報の被写体であるか否かを認識する。ここで、類似度が第1の閾値よりも低く、一致度が第2の閾値以上の場合には、被写体画像の被写体は登録画像情報の被写体とは異なる被写体であると認識される。
(もっと読む)
ビデオ監視システム
ビデオ監視システムが開示される。このシステムは、複数のモデルを記憶するモデルデータベースと、最近観察軌跡の複数のベクトルを記憶するベクトルデータベースとを有する。システムは、現在軌跡データ構造の動きデータに対応する新しい動きモデルを構築するモデル構築モジュールを含む。システムは、動きデータと異常性スコアを有する現在軌跡データ構造を生成する。システムは、また、ベクトルのサブセットと現在軌跡データ構造との類似性基準に基づいて、現在軌跡データ構造に対して最も類似したベクトルのサブセットを決定するように構成されたデータベースパージモジュールを含む。データベースパージモジュールは、更に、サブセット内のベクトルの量とベクトルのサブセットの最近さとに基づいて、モデルデータベース内の動きモデルのうちの1つを新しい動きモデルと置き換えるように構成される。 (もっと読む)
画像処理装置
【課題】入力画像間での手振れを防止すること。
【解決手段】制御装置104は、テンプレート画像を用いたテンプレートマッチング処理により、スルー画の入力画像における背景位置を特定して、背景位置の入力画像間での移動方向及び移動量を特定するベクトルを算出し、前入力画像における切り出し範囲を入力画像間での背景位置の移動方向に、背景位置の移動量だけ移動させた位置に現入力画像における切り出し範囲を設定し、切り出し範囲内の画像を抽出してモニタ106に表示する。
(もっと読む)
運転者監視装置、運転者監視方法及び車両
【課題】カメラの基線長を長く設定することなく、かつ、外乱の影響に妨げられずに十分な精度で運転者の顔向きを検出する運転者監視装置を提供する。
【解決手段】運転者の顔向きを監視する運転者監視装置10であって、運転者に対して近赤外光を照射する補助照明22と、複数のレンズ211a、211bと、複数のレンズ211a、211bのそれぞれに対応する撮像領域214a、214bを有する撮像素子214とを有し、運転者の顔を撮影する複眼カメラ21と、複眼カメラ21で撮影することで得られる画像を処理し、運転者の顔の特徴点の3次元位置を検出することで、運転者の顔向きを推定するECU30とを備え、複眼カメラ21は、複数のレンズ211a、211bの並ぶ方向である基線方向が鉛直方向に一致するように配置される。
(もっと読む)
画像処理装置、及びプログラム
【課題】撮影中における主要被写体の動きを表現する複数の主要被写体像を合成した画像において、各々の主要被写体像により表現されている主要被写体の撮影順を鑑賞者に把握させる。
【解決手段】異なる時間に撮影された複数の静止画像からそれぞれ抽出された主要被写体像を合成した合成画像として、指標付き合成画像102,G103を生成する。指標付き合成画像102,G103には、複数の主要被写体像G(61),G(65),G(69)の相互における大きさの時間的な変化等を示す指標Aを合成する。指標Aにより、複数の主要被写体像G(61),G(65),G(69)の撮影順が把握可能となる。
(もっと読む)
画像処理装置、画像処理方法及び画像処理用プログラム
【課題】高精度な移動物体検出を可能とする。
【解決手段】画像における1フレーム中のm×m(m:2以上の整数)画素を1ブロックとして、時間的に前後のフレームにおける対応する複数のブロックについてそれぞれの輝度データによる行列を前後のフレーム分作成する行列作成手段21と、前記対応する行列を用いて共分散行列を生成する生成手段22と、前記共分散行列から固有値及び固有ベクトルを求め、固有値及び固有ベクトルに基づき前後のフレームの対応する各ブロック間のユークリッド距離を求める演算手段23と、ユークリッド距離と閾値とを用いて画像処理を行う処理手段24とを具備する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より簡単かつ迅速に、安定して被写体をトラッキングできるようにする。
【解決手段】平坦判定部51は、入力画像の各領域の画素の画素値の分散に基づいて、入力画像が平坦な画像であるか否かを判定する。トラッキング部52は、入力画像が平坦でない場合、入力画像のフレーム間の動きを検出することにより、入力画像から追尾対象の被写体を検出する。トラッキング部53は、入力画像が平坦である場合、入力画像から特徴の特徴量を抽出し、特徴量から入力画像の各領域における被写体らしさを示す被写体マップを生成し、被写体マップを用いて入力画像から追尾対象の被写体を検出する。このように、入力画像が平坦か否かに応じて異なるトラッキング方法で追尾対象の被写体を検出することで、より安定して被写体を追尾することができる。本発明は、撮像装置に適用することができる。
(もっと読む)
運動算出装置及び運動算出方法
【課題】自装置の運動を安定に算出することができる運動算出装置及び運動算出方法を提供する。
【解決手段】運動算出装置10が、平面を含む範囲を撮像し、撮像した画像を出力する撮像部11と、平面が撮像されている領域を、画像から抽出する抽出部13と、撮像部11が所定の時間間隔で撮像した複数の画像から、特徴点と当該特徴点の移動ベクトルとを検出する追尾部12と、特徴点についてのエピポーラ拘束と、第1領域についてのホモグラフィと、の両方に基づいて、自装置の運動を算出する算出部14と、を備える。
(もっと読む)
検出装置およびその方法
【課題】頭部内のエッジを頭部の境界として誤検出することを防ぎ、頭部領域を精度よく検出する画像処理装置を提供する。
【解決手段】画像処理装置は、画像から人物の顔領域を検出する顔検出手段と、検出された人物の顔領域に基づいて頭部検出領域を設定する頭部検出領域設定手段と、設定された頭部検出領域のエッジを検出してエッジ画像を生成するエッジ検出手段と、顔領域の色に基づいて頭部検出領域の画像において、肌色領域を検出する肌色領域検出手段と、エッジ画像において、前記肌色領域を膨張させ、膨張した肌色領域に存在するエッジを削除するエッジ削除手段と、エッジ削除手段によりエッジが削除された画像から頭部領域に対応した候補楕円を検出する楕円検出手段とを備える。
(もっと読む)
161 - 180 / 769
[ Back to top ]