
Fターム[5L096HA05]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 追尾 (769)
Fターム[5L096HA05]に分類される特許
41 - 60 / 769
画像追跡装置及び画像追跡方法
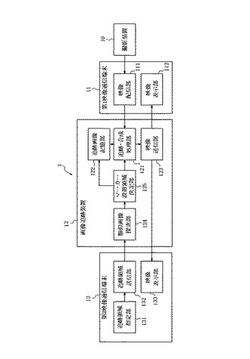
【課題】ライブ映像中の特定の物体を画像特徴により追跡する際に、似た特徴を持った別の物体等の誤検出を防止する。
【解決手段】画像追跡装置12は、第1映像通信端末11から配信された映像を受信し、該映像を第2映像通信端末13に送信する映像送信部123と、前記第2映像通信端末13から追跡画像の情報を取得し、該追跡画像の類似画像を前記映像中から探索する類似画像探索部124と、類似画像が存在する場合にはマーカー設置領域を決定するマーカー設置領域決定部125と、前記映像から追跡画像を探索するとともに、類似画像が存在しない場合には、前記探索した追跡画像に目印画像を合成した第1の合成映像を第1映像通信端末11及び第2映像通信端末13に送信し、類似画像が存在する場合には、前記探索した追跡画像に前記マーカー設置領域を重畳した第2の合成画像を第1映像通信端末11に送信する追跡・合成処理部121と、を備える。
(もっと読む)
監視装置、監視方法及び監視プログラム

【課題】誤検出を低減し、高精度に不審対象を監視することができる監視装置を提供する。
【解決手段】対象検出部21は、撮像部1により撮像された動画像から監視する対象を検出する。動線情報作成部22は、対象検出部21により検出された対象の移動ベクトルから動線情報を作成する。不審行動判定部24と、動線情報から、予め設定された不審行動パターン31に基づいて、対象検出部21により検出された対象が不審対象候補か否かを判定する。複合行動判定部26は、不審対象候補の動線情報と、不審対象候補の周辺に存在する周辺対象の動線情報とから、予め設定された条件である複合行動パターン32に基づいて、不審対象候補が不審対象か否かを判定する。
(もっと読む)
物体認識装置、物体認識装置の制御方法、およびプログラム
【課題】画像中から物体を追跡する処理において、一旦追跡を中止して背景の異なるシーンで追跡を再開する場合においても適切な認識モデルを使用した高精度の物体検出を行う。
【解決手段】画像を逐次取得する取得部と、画像から部分領域を抽出して当該部分領域から特徴量を抽出する抽出部と、抽出された特徴量と、対象物体を示す正事例の特徴量および対象物体の背景を示す負事例の特徴量を含む第1の認識モデルまたは正事例の特徴量を含む第2の認識モデルとに基づいて、部分領域が対象物体か否か認識する認識部と、認識の結果に基づいて、抽出された特徴量を第1の認識モデルへ追加して更新する更新部と、対象物体と認識された物体領域を出力する出力部と、を備え、認識部は、取得部により取得された前の画像について物体領域が出力されている場合、第1の認識モデルに基づいて認識し、前の画像について物体領域が出力されていない場合、第2の認識モデルに基づいて認識する。
(もっと読む)
顔画像認識装置及び顔画像認識プログラム
【課題】顔画像認識の処理の高速化及び登録作業の簡単化が可能な顔画像認識装置及び顔画像認識プログラムを提供することを課題とする。
【解決手段】映像中の人物の顔を認識する顔画像認識装置20であって、認識対象となる人物の正面の向きの顔画像の人物特定テンプレート及び多数の人物の目標とする正面以外の向きの平均的な顔画像の人物不特定テンプレートが登録されたテンプレート格納手段24と、映像から人物の顔が写っている顔領域を抽出する顔領域抽出手段22と、抽出された顔領域の特徴を抽出し、顔領域の特徴とテンプレート格納手段24に登録された人物特定テンプレートとを照合して、顔領域に写っている人物の顔を認識すると共に、顔領域の特徴とテンプレート格納手段24に登録された人物不特定テンプレートとを照合して、顔領域に写っている認識した人物の顔の向きを追跡する顔認識手段23とを有することにより上記課題を解決する。
(もっと読む)
体動五線譜並びにその画像処理モジュール、運動複製モジュール及び生成モジュール
【課題】本発明は、人体運動を厳密に記録、保存し、肢体運動を細かく丁寧に編集、修正して、より完璧な動作を創作し、且つ、直接ロボットまたはその他のマルチメンバー・ボディーにより同様の動作を再現させることが可能な体動五線譜並びにその画像処理モジュール、運動複製モジュール及び生成モジュールを提供することを課題とする。
【解決手段】本発明の体動五線譜Iは、三次元運動読み取り装置によって、複数のリンク(link)または関節(joint) を含むマルチメンバー・ボディーの運動の読み取りを行うことで、前記マルチメンバー・ボディーの複数身体構成部位運動情報を取得し、さらにこの身体構成部位運動情報を符号化して成る運動符号化画像である。本発明の運動符号化画像は、音楽における五線譜と同様、マルチメンバー・ボディーの運動を記録、保存、再現することが可能な新たな方式に基づく記録形態であることから、体動五線譜と称した。
(もっと読む)
状態追跡装置、方法、及びプログラム
【課題】局所最適解に陥ることを防止して、追跡対象の状態を追跡する。
【解決手段】類似性データ記憶部34に、観測空間におけるパーティクルの類似性を定めた類似性データを記憶しておく。事後確率分布推定部26で、前時刻に事前確率分布予測部28で予測された事前確率分布と、観測取得部24で実際に取得された観測とに基づいて、追跡対象の状態の事後確率分布を推定し、事前確率分布予測部28で、事後確率分布推定部26で推定された事後確率分布に従ってサンプリングされた現在のパーティクル、及び類似性データに基づいて、現在のパーティクルと観測空間において類似するパーティクルを用いて、次時刻の追跡対象の状態の事前確率分布を予測する。
(もっと読む)
画像処理装置及びその制御方法
【課題】 レンズの周辺光量落ちの影響が被写体の追尾結果に与える影響を低減し、精度のよい被写体追尾を実現する画像処理装置及びその制御方法を提供する。
【解決手段】 基準画像と、比較先画像における探索領域を構成する複数の部分画像との相関度に基づいて、比較先画像での被写体領域を探索して被写体追尾を行う。基準画像と部分画像との相関度を算出する前に、基準画像と部分画像における、画素の最大輝度値が予め定められた同一の輝度値となるように、各画素の輝度値を補正する。
(もっと読む)
電子装置、データ生成方法およびデータ生成プログラム
【課題】異なる種類のセンサで検出された信号を比較する。
【解決手段】入力された情報を抽象化する抽象化部24と、抽象化された情報を正規化する正規化部25と、正規化された情報を2つ以上比較し、該比較結果に基づいて該2つ以上の正規化された情報が同種の情報であるか否か判定する比較判定部27と、を備える。
(もっと読む)
挙動認識システム
【課題】ビデオフレームの取得されたストリームに基づいて挙動を解析及び学習する方法及びシステムを提供する。
【解決手段】ストリーム中に示される物体が、ビデオフレームの解析に基づいて決定される。各物体は、物体の運動をフレームごとに追跡するのに使用される、対応する探索モデルを有することができる。物体のクラスが求められ、物体の意味表現が生成される。意味表現は、物体の挙動を求め、取得されたビデオストリームによって示される環境内で生じている挙動について学習するのに使用される。環境内のそうした物体の移動又は活動或いは不在を解析することにより、任意の環境についての正常な挙動及び異常な挙動を、迅速に、リアルタイムで学習し、学習したものに基づいて、異常な挙動又は疑わしい挙動を識別及び予測する。
(もっと読む)
画像領域追跡装置、画像領域追跡方法、および、コンピュータ・プログラム
【課題】画像特徴の類似する追跡対象領域と非追跡対象領域とが近接する画像を含む動画像において、追跡対象領域の追跡をより精度よく行う画像領域追跡装置を提供すること。
【解決手段】時系列的に連続する入力画像が入力される画像入力部101と、任意の入力画像において追跡対象モデルを取得する追跡対象モデル取得部102と、各入力画像において、該入力画像および他の入力画像間のフローベクトルに基づいて、該他の入力画像における追跡対象領域からの移動ベクトルを推定することにより該入力画像における追跡対象領域の概略位置を表す第1追跡位置を求める第1追跡部103と、各入力画像において追跡対象モデルの画像特徴に基づく追跡処理を用いて第1追跡位置を補正することにより第2追跡位置を求めるとともに、該入力画像における統合的な追跡位置である統合追跡位置を第2追跡位置に基づいて決定する第2追跡部104と、を備える。
(もっと読む)
移動量測定装置および移動量測定方法
【課題】移動と停止を繰り返すような動きをする移動体の移動量を測定する場合であっても、高精度に測定する。
【解決手段】測定物の画像を入力する手段と、測定物のテンプレートを取得する手段と、前記取得されたテンプレートを保存する手段と、前記測定物の画像と前記保存されたテンプレートから前記測定物の移動量を算出する手段と、測定物が停止しているかを判定する手段と、を備え、前記保存されたテンプレートは、前記測定物が停止しているかを判定する手段により停止していると判定された場合に保存されたテンプレートを更新することを特徴とする。
(もっと読む)
遠隔操作装置、遠隔操作方法及びプログラム
【課題】操作対象に対する複数の遠隔操作を適正に行う。
【解決手段】表示装置100であって、撮像部3により逐次生成される複数の画像フレームのうち、一の画像フレームに係る画像領域内で操作対象を操作するための操作指示を入力可能な操作指示範囲を設定する第1設定部6aと、操作対象の所定の操作内容と対応付けられ、当該操作を指示する操作指示部の状態を少なくとも二つ設定する第2設定部6bと、逐次生成される複数の画像フレームに基づいて、各画像フレームの操作指示範囲内から、少なくとも二つの操作指示部の状態の各々を検出する指示部検出部6cと、検出された各状態の操作指示部と対応付けられている所定の操作内容に応じて操作対象を動作させる動作制御部6eとを備えている。
(もっと読む)
画像追尾装置
【課題】テンプレート内の追尾対象が小さい場合であっても、背景の誤検出に伴うテンプレートの更新精度を維持する。
【解決手段】画像追尾装置は、被写界画像を生成する撮像手段と、追尾対象の特徴を示す基準情報を生成する生成手段と、被写界画像内の画像情報が類似する類似領域を抽出する抽出手段と、基準情報に基づいて新たな被写界画像から第1追尾対象候補の位置を検出する第1検出手段と、類似領域に基づいて新たな被写界画像から第2追尾対象候補の位置を検出する第2検出手段と、第1および第2追尾対象候補の位置に基づいて、第1および第2追尾対象候補が同一の追尾対象か否かを判定する判定手段と、判定結果に基づいて、第1および第2追尾対象候補の位置の一方を追尾対象の位置として選択する選択手段と、第1および第2追尾対象候補が異なる場合には、第2追尾対象候補の位置を基準として新たな基準情報を生成する更新手段とを有する。
(もっと読む)
入力された発話の関連性を判定するための装置および方法
【課題】オーディオまたはビジュアルの向きを用いて入力された発話の関連性を判定する。
【解決手段】ある時間間隔における発話中のユーザの顔の存在を特定する。時間間隔の間のユーザの顔に関連づけられた顔の向きの特徴を取得する。ある場合には、入力された音に対する向きの特徴を判定する。顔の向きの特徴にもとづいて時間間隔の間のユーザの発話の関連性を特徴付ける。
(もっと読む)
物体認識装置および物体認識方法
【課題】識別対象が画像上で変形する場合であっても、その識別対象の認識率を向上させることができる、物体認識装置および物体認識方法を提供する。
【解決手段】物体認識装置1は、記憶部20内に、認識対象の情報を示す監視物体情報210と、カメラ装置のパラメータを示すカメラ情報220を記憶している。そして、物体認識装置1は、監視物体情報210を用いて、監視空間上に検知領域を作成し、その作成した検知領域を、カメラ情報220を用いて、監視画像上の変形検知領域に変換する。物体認識装置1は、変形検知領域の画像情報100について特徴量を抽出し、認識対象の物体か否かを判定する。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
物体検出装置
【課題】ユーザーによるモーション操作の検出精度を向上する。
【解決手段】所定のフレームレートで逐次撮影し、撮影画像を取得する撮影部と、前記撮影部で撮影する際の照明光を発光する照明部と、前記照明部が第1光強度と前記第1光強度よりも小さい第2光強度とを選択的に発光するように切換制御する制御部とを備える。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
視線計測システム、方法およびプログラム
【構成】 サーバ12は、ステップS105で、顔の特徴点の位置データを取得し、ステップS107で顔の姿勢および位置のデータを取得する。ステップS111において、特徴点の位置データおよび顔の位置および姿勢データに基づいてフレーム画像毎に個人パラメータおよびフレームパラメータを設定し、ステップS115で、個人パラメータおよびフレームパラメータの各フレーム顔画像に対する適合度を示すスコア値を計算し、全フレーム画像についてそのスコア値を積算する。積算スコア値が所定の閾値を下回るまで、ステップS121で各パラメータを修正する。修正された個人パラメータおよびフレームパラメータに基づいて、眼球中心と虹彩中心を結ぶ3次元直線として視線方向を計測する(S123)。
【効果】 全フレームの顔画像と照合して個人的パラメータおよびフレームパラメータを修正するので、視線の推定または計測の精度を向上させることができる。
(もっと読む)
41 - 60 / 769
[ Back to top ]