
Fターム[5L096LA14]の内容
Fターム[5L096LA14]の下位に属するFターム
アレイ構造 (5)
Fターム[5L096LA14]に分類される特許
1 - 20 / 22
画像認識装置
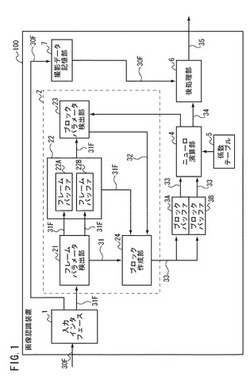
【課題】本発明は、ハードウェアの規模を小さくでき、ニューロ演算を用いた画像認識処理をリアルタイムで実行することができる技術を提供することを課題とする。
【解決手段】画像認識装置100は、車載カメラが撮影した動画像データのフレーム30Fに歩行者が撮影されているか否かを判定する。前処理部2は、フレームの中から検出ブロックを決定し、フレームから検出ブロックに対応するブロック画像データを切り出す。ブロック画像データから、検出ブロックのサイズよりも小さい所定サイズのブロックデータ33が作成される。ニューロ演算部4は、ブロックデータ33をニューロ演算して出力シナプス34を算出する。後処理部6は、出力シナプス34に基づいて、検出ブロック内に歩行者がいるか否かを判定する。後処理部6は、歩行者が検出された場合、歩行者が検出された検出ブロックをフレーム30Fの上に重ねた結果データ35を作成する。
(もっと読む)
検出装置、負荷低減方法およびプログラム

【課題】大きさがおおよそ同じである複数の物体がほぼ同一平面上に配置されている場合に、それら複数の物体を撮影した画像中の複数の物体像のそれぞれを検出する際の処理負荷が著しく増大してしまうのを回避する。
【解決手段】画像から相互に異なる複数の大きさの物体像のそれぞれを検出可能な複数の検出部を有する検出装置であって、画像の入力を受け付け、受け付けた画像を構成する画素データを当該画像の行毎に複数の検出部へ出力する画像分配部と、画像分配部にて受け付けられる画像中の複数の物体像のそれぞれの大きさと、当該複数の物体像のそれぞれの当該画像中の列方向の位置との関係を算出する算出部とを有し、画像分配部は、算出された関係に基づいて複数の検出部のうち当該行の画素データを出力する検出部を選択し、複数の検出部のそれぞれは、画素データを受け付けると、受け付けた画素データが示す画像から物体像を検出する。
(もっと読む)
形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置
【課題】形状ベースマッチング処理における精度や処理時間、ロバスト性等の特性に関して最適化されたテンプレートデータを作成するための形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置を提供する。
【解決手段】形状ベースマッチング処理を用いて電子部品2の搭載位置決めをする部品実装装置において、サーチ評価画像を取得し、このサーチ評価画像をもとに上記パラメータを調整する。このとき、先ず、位置決め処理の精度が、ユーザが指定した要求精度を満たすようにパラメータを設定する。次に、位置決め処理のタクトタイムが短縮する方向に上記パラメータを徐変しながら精度を評価し、当該精度が要求精度を保てる限界値を最適なパラメータとして取得する。この最適パラメータ取得処理を、部品ロットの切り替わりに際し必要に応じて行う。
(もっと読む)
画像照合装置と画像形成装置および画像照合方法
【課題】 半導体メモリを用いることなく多数の画像パターンを登録でき、しかも登録した各画像パターンを速やかに取り出して入力画像と照合できる画像照合装置と画像形成装置および画像照合方法を提供する。
【解決手段】 入力画像データを単位ごとに抽出する。一方、エンドレスに直列接続した複数のシフトレジスタからなる画像パターン格納部53を設け、その各シフトレジスタに複数の画像パターンデータをそれぞれ格納し、これら画像パターンデータをクロック信号CLKに応じて順にシフトしながら1つずつ出力する。そして、上記抽出される1つの入力画像データと上記出力される各画像パターンデータとを照合部54で照合する。
(もっと読む)
検出窓走査により画像内の物体を認識および位置特定するためのデータストリームパイプラインアーキテクチャを有する装置
本発明は、検出窓を走査することにより、画像内の物体を認識および位置特定する装置に関する。
本発明によれば、装置(1)は、同時ハードウェアタスク用のパイプライン形式で設計されたデータストリームアーキテクチャを含み、このアーキテクチャは、
各検出窓に対して記述子(D)を生成する手段(4、5、6、9)と、
各記述子に対して方位勾配のヒストグラムを決定するヒストグラム決定部(7)と、
N個の並列の処理ユニット(UT)であって、各処理ユニットは、各記述子に関連付けられたパラメータに応じてヒストグラムを解析することにより、関係する記述子が認識対象物体の少なくとも一部分を含む確率を表すパーシャルスコアを与えることが可能であり、各検出窓のパーシャルスコアの合計は、検出窓(F1、F2、…、FN)が認識対象物体を含む確率を表すグローバルスコア(S1、S2、…、SN)を与える、処理ユニット(UT)と、を含む。  (もっと読む)
(もっと読む)
相関処理装置及びその相関処理装置で読みとり可能な媒体
【課題】
テクスチャサイズの設定又はウインドウの位置に自由度が求められた場合において、テクスチャとウインドウの相関関係を求める計算に対して、効率的な並列処理が可能な構成を有する画像処理装置を提供することを目的とする。
【解決手段】
探索したい画像の第1画像ピクセル値と、部分画像の第2画像ピクセル値とを演算する機能を有するN個(Nは正の整数)の演算回路と、M個(MはNより小さい正の整数)の構成要素を有する矩形パタンであって、探索したい画像を矩形パタンによって分割したときの分割数が最小となるような矩形パタンを選択する矩形パタン選択回路と、N個の演算回路の内、M個の演算回路を活性化するとともに、M個の演算回路によって演算が行われるM個の第1画像ピクセル値及びM個の第2ピクセル値を特定する制御回路と、M個分の演算回路によって得られた演算結果を積算する積算器と、を備える相関処理装置を提供する。
(もっと読む)
顔検出装置及び顔検出プログラム
【課題】入力画像の中から顔を精度よく検出することができるようにする。
【解決手段】フィルタ選択部3により選択されたフィルタを用いて、タイル領域選択部1により選択されたタイル領域を構成している画素の画素値に対するフィルタ演算を実施するフィルタ演算部4と、フィルタ演算部4の演算結果からタイル領域内に顔が含まれているか否かを判定する顔判定部5とを設け、顔判定部5により顔が含まれているか否かを最終的に判定することができていない場合、上記フィルタの変更を指示し、顔判定部5により顔が含まれているか否かを最終的に判定することができている場合、上記タイル領域の変更を指示する。
(もっと読む)
データ処理装置およびその制御方法
【課題】ツリー構造を備えた画像処理を再構成可能なデバイスにより実行する。
【解決手段】回路を再構成可能なPEマトリクス10と、PEの接続情報を含むコンフィグレーションデータ18を出力する制御ユニット2aとを有するデータ処理装置50を提供する。この装置50の接続情報ライブラリ55には、データの入出力を伴う複数の処理のそれぞれについて、第1のRAMエレメントを入力対象とし、第2のRAMエレメントを出力対象とする第1の処理回路を構成するための第1の接続情報と、第2のRAMエレメントを入力対象とし、第1のRAMエレメントを出力対象とする第2の処理回路を構成するための第2の接続情報とが格納され、制御ユニット2aは、複数の処理を順番に実行するために、先の処理において出力対象となったRAMエレメントを入力対象とする接続情報を選択しコンフィグレーションデータ18を出力する。
(もっと読む)
画像処理装置
【課題】例えば動きベクトルの検出のように、所定単位で画像データを処理する場合に、その画像データを1回のアクセスで取得でき、その処理の高速化を図ること。
【解決手段】この発明は、画像上の画像データを16×16画素のマクロブロック単位に分割し、さらにマクロブロックを4×4画素のサブブロック単位に分割し、サブブロック単位で動画像の動きベクトルを検出する画像処理装置に適用できる。ローカルメモリ42は、8個のバンク(0)〜(7)を有し、その各バンクは4画素の画像データが一度に読み書きできるようになっている。アクセス制御部43は、所定のアクセスモードに従って、8個のバンク(0)〜(7)にサブブロック単位でアクセスする場合に、8個のバンクまたはそのうちの4個のバンクに一度にアクセスする。これにより任意の位置の4×4画素のアクセスが1 回のアクセスで読み書きが可能となる。
(もっと読む)
パターン画像認識システム
【課題】変位計算を汎用グラフィックプロセッサ上で効率的に行え、且つ、主プロセッサのメモリと汎用グラフィックプロセッサのメモリとの間のデータ転送によるオーバーヘッドを減少させることができるパターン画像認識システムを提供する。
【解決手段】パターン認識手段は、入力画像のコピーを複数個連結した連結入力画像を生成する連結入力画像生成手段と、標準画像のうち異なる複数個を連結した連結標準画像を生成する連結標準画像生成手段と、前記連結入力画像と前記連結標準画像との間で変形計算を行い、複数の変位関数からなる連結変位情報を求める変形計算手段と、前記連結変位情報に基づいて、前記入力画像と各標準画像との類似度を計算し、これに基づいて認識結果を出力する認識結果出力手段と、からなる。
(もっと読む)
移動体追跡装置
【課題】複数の画像入力部で検出された移動体の特徴量の照合精度を向上できる移動体追跡装置を提供する。
【解決手段】本発明による移動体追跡装置は、移動体の画像を取得する複数の画像入力部と、取得された画像から移動体の向きと特徴量を検出し、向きと特徴量を統合したデータを作成する画像処理部と、データを格納するデータ格納部と、格納されたデータの内、向きが同一あるいは対称のデータの特徴量から、同一移動体であるか否かを照合する照合部と、照合部による照合結果に基づいて同一移動体を追跡する追跡部とを備える。
【効果】移動体の向きと特徴量を統合することにより、向き別に特徴量を比較することができるので、移動体の照合精度が向上する。
(もっと読む)
ラベリング処理方法、ラベリング処理装置、画像処理装置、画像形成装置、及びコンピュータプログラム
【課題】ラスタスキャン型画像データの閉領域のラベル付けに適用されるパイプライン処理方式のラベリング処理方法、ラベリング処理装置、画像処理装置、画像形成装置、及びコンピュータプログラムの提供。
【解決手段】ラベリング処理装置は、周辺画素に対して設定してある優先順位に従って判断処理を行うことにより、注目画素に対して仮ラベルを付与する仮ラベル付与処理部111、周辺画素が予め決められたパターンの場合にのみ注目画素の仮ラベルと周辺画素の仮ラベルが示すラベルテーブル値との比較を行うことによって両者の関連性を判定し、当該ラベルテーブル値をアドレスとしたラベルテーブル値を注目画素の仮ラベルによって更新する仮ラベル連結処理部113を備える。
(もっと読む)
画像処理装置
【課題】画像フィルタに制限されずに希望する画像処理回路を構築することを可能とする画像処理手順を学習することができ、画像処理の処理速度を向上させることが可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、プロセッサ2と、シフトレジスタ3と、学習ユニット4と、マルチプレクサ5と、学習手段6とを備えている。さらに、各学習ユニット4xは、関数処理回路が並列に配置された演算ユニットと各関数処理回路に入力するデータを選択する選択器で構成されている。複数個が直列に連結されている学習ユニット4の各選択器は、画像処理の手順を示す選択信号SSに従って各関数処理回路に入力するデータを選択し、学習手段6は各学習ユニット4の選択器に割り当てる選択信号SSを学習により最適化する。
(もっと読む)
画像識別回路
【課題】テキスト画と自然画の境界部分において不自然な輪郭補正が行われないように、テキスト画と自然画の識別に加えて境界部分の識別も可能な画像識別回路を提供すること。
【解決手段】入力ディジタル映像信号の着目画素についてその着目画素がテキスト画であるか自然画であるかを識別する画像識別回路において、着目画素を中心とした複数画素を単位として前記識別結果の分布を、テキスト画と自然画の境界部分を検出するために予め設定した複数の境界パターンと照合して、着目画素が境界部分であるか否かを検出する境界検出部を設けた。
(もっと読む)
動き検出回路と動き検出処理エレメント
【課題】高効率の動き検出オペレーションを達成する動き検出回路、及び、要求されるデータに対する並行処理を実行できるように複数の演算回路を使用する動き検出処理エレメントを提供する。
【解決手段】動き検出回路内のラッチモジュールは、n個のm段シフトレジスタを有する。各シフトレジスタはカレントブロックデータを受信し、上記受信されたカレントブロックデータをタイミングに従って次の段へ送信する。処理モジュールは複数の処理エレメント(PE)を有し、これらは(m+1)個のグループに分割される。i番目のグループのPEは左側探索ウィンドウデータ及び右側探索ウィンドウデータを受信し、i番目のラッチ段の入力端及び出力端に結合される。但し、0<i≦mである。各PEは各々、探索ウィンドウ内の対応するブロック候補とカレントブロックとの類似度を比較し、処理結果を出力する。比較ユニットは、上記処理結果を受信して比較し、第1の比較結果を出力する。
(もっと読む)
ラベリング処理装置、ラベリング処理方法、ラベリング処理プログラム、および記録媒体
【課題】並列演算処理によりラベリング処理が高速化され、分割領域をまたがる連結領域の異なるラベル値を統一する特別処理を不要とするラベリング処理装置を実現する。
【解決手段】2次元の2値画像データ領域内で、連結領域に対してラベル付けを行うラベリング処理装置において、画素縦2行横m列または縦m行横2列(mは2以上の整数)で構成される、第1走査マスクから第(M−1)走査マスク(Mは2以上の整数)までの互いに異なる走査マスクの何れとも異なる、第M走査マスクを参照してラベル付けを行う第Mラベル演算処理手段までの、M個のラベル演算処理手段を備え、M個のラベル演算処理手段が、前記2値画像データ領域内の第(M×N)ライン(Nは0以上の整数)から第(M×N+M−1)ラインまでの各ラインに順に対応付けられ、かつM個のラベル演算処理手段のそれぞれが、各ライン上の画素のラベル付けを行う、M個のラベル付け処理を同時に行う。
(もっと読む)
画像処理アルゴリズムの導出方法および導出システム
【課題】 画像処理を規定するアルゴリズムの導出時間が短くなる導出方法を提供する。
【解決手段】 導出方法を実現するシステム1100は、データを格納する記憶部1112と、評価の対象となる複数の個体を生成する個体群生成部1116と、評価処理を実行する装置の数に応じて個体を分ける分割部1118と、分けられた個体のグループを各装置に対して転送する評価対象転送部1120と、転送された個体を予め準備された基準に従って評価する評価部1124と、評価結果を転送するタイミングを検知するタイミング検知部1126と、そのタイミングに応じて評価が完了した個体についての結果を転送する結果転送部1128と、その結果に基づいて評価されていた個体が属する世代の次の世代に属する個体を生成する次世代個体群生成部1132とを含む。
(もっと読む)
データアクセス装置、データアクセス方法、プログラムおよび記録媒体
【課題】アクセスパターンの各設定位置で、そのパターンに対応した複数の画素データの同時取得を容易とする。
【解決手段】データ格納制御部120は、第K(K=1〜3)の位相処理時に、画面の各画素列を、K番目の画素列を最初の画素列として第1〜第3の画素列の繰り返しであるとし、この第1〜第3の画素列の画素データを夫々上位メモリバンクBK0〜BK2に格納する。データアクセス制御部140は、第Kの位相処理時に、アクセスパターンACPの各設定位置で、パターンACPで特定される12個の画素の画素データを夫々12個の下位メモリバンクBK00〜BK03,BK10〜BK13,BK20〜BK23から同時に読み出し、またパターンACPの設定位置を移動した際に、それで特定される12個の画素の画素データが夫々異なる下位メモリバンクに格納されているように、画素データの移動処理をする。
(もっと読む)
領域ベース複数パス動き推定及び時間的動きベクトル候補の更新を用いたビデオ処理
本発明は、画像シーケンスの処理対象画像の処理中画像領域を形成する第1画素ブロックの動きベクトルを突き止めるビデオ処理方法及び装置に関する。ビデオ処理装置の処理ユニットはそれぞれの画像領域を、次の画像領域に進む前に2度以上処理して第1画素ブロックの動きベクトルを突き止める。これは、画像シーケンスの先行画像内の第2画素ブロックに関して突き止められた少なくとも1つの時間的候補ベクトルを含む候補ベクトルの組の評価により行われる。当該装置は、処理対象画像の画像領域の2度目の処理を行う前に、先行画像内で処理中画像領域の外側に位置する第3画素ブロックに関して突き止められた時間的候補ベクトルを、処理対象画像内で突き止めた第3画素ブロックの動きベクトルで置き換えて更新する。第1の動き予測パスにて割り当てられた時間的動きベクトル候補を更新することにより、2度目以降の動き予測パス後の動き予測品質が向上される。  (もっと読む)
(もっと読む)
車両周辺認識システム及び画像処理装置
【課題】 車両の外界を撮像して障害物、歩行者などの車両周辺を認識する車両周辺認識システム及び該車両周辺認識システムを構成する画像処理装置を提供する。
【解決手段】 ECU2は、ビデオカメラ1aで撮像した1フレーム分の撮像画像に対して二次元フーリエ変換を行い、二次元フーリエ変換した撮像画像をECU3、4、5へ送信する。ECU2は、標準パターンH1、H2、…Hxを各ECU2、3、4、5に割当て、各ECU2、3、4、5において、二次元フーリエ変換後の撮像画像と標準パターンのフーリエ変換の共役複素数との積和演算(コンボリューション演算)、及び逆二次元フーリエ変換の演算を並列に行うことにより、各ECU2、3、4、5における演算処理量を分散する。
(もっと読む)
1 - 20 / 22
[ Back to top ]