
国際特許分類[A01B63/10]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 農業機械または器具を昇降する,あるいは位置を調整する装置またはそのための配置 (864) | トラクタに装着された作業機のためのもの (696) | 水圧あるいは気圧によって操作されるもの (611)
国際特許分類[A01B63/10]の下位に属する分類
トラクタへの装着位置,例.後部,によって特徴づけられるもの (32)
作業機とトラクタ車輪との間の重量移動を制御するためのもの
作業機の作業深さの調整 (93)
動力つり上げリンクへの作業機の装着 (1)
国際特許分類[A01B63/10]に分類される特許
101 - 110 / 485
農作業機のリモコンシステム
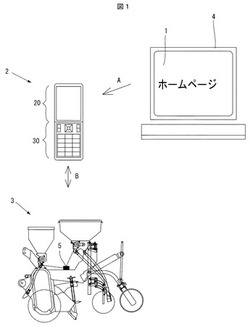
【課題】トラクタに装着して農作業を行う作業機のための設定等が携帯電話を利用することで、より簡単に行える農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、携帯電話2は、携帯電話2のボタンを利用して作業機3のための設定を行う設定機能と、設定機能による設定情報を送信する送信機能とを有し、作業機3は、作業機3に設けられた出力機器と、携帯電話2から設定情報を受信する受信部と、出力機器の操作を行う操作表示部70と、受信部が受信した設定情報と操作表示部70からの操作信号に基づき出力機器を制御する制御部5とを有する。
(もっと読む)
作業車両

【課題】作業車両において、作業機を昇降させることのできるフィンガーレバーを利用した左右操舵装置、及びウインカ点滅を可能にする。
【解決手段】ステアリングハンドルの近傍に一回の操作で作業機を昇降させることのできるフィンガーレバー、該フィンガーレバーの昇降操作検出用のフィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチ、及び、チエックヒューズを設け、旋回切れ角センサの故障時には前記チエックヒューズを取り外すと緊急操舵モードに移行し、前記フィンガーレバーの昇降操作に基づく前記フィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチの検出信号により、前記旋回切れ角センサの検出値を無視して前記旋回駆動手段、前記操舵装置を作動させて左右操舵するコントローラを設けたことを特徴とする作業車両とする。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
作業車
【課題】操作性を維持しながら作業車の製作コストを下げ易くする。
【解決手段】手動モード入力スイッチ26が、機体フレームの左右のいずれかが上昇又は下降するように、左右のトラックフレームのうちのいずれかを上昇又は下降させるローリング用手動モードで作動させる制御指令を入力可能なローリング用手動モード入力スイッチ26aと、左右のトラックフレームを同時昇降させる昇降用手動モードで作動させる制御指令を入力可能な昇降用手動モード入力スイッチ26bとを各別に備え、ローリング用手動モード入力スイッチ26aが、横長でかつ機体前後方向の軸芯Ya周りに揺動操作自在なシーソースイッチで構成され、昇降用手動モード入力スイッチ26bが、縦長でかつ機体左右方向の軸芯Yb周りに揺動操作自在なシーソースイッチで構成されている。
(もっと読む)
作業車
【課題】作業用アタッチメントをアームに固定してなる作業ユニットを作業車両から分離可能とすること。
【解決手段】作業車は、通常の作業時には、ホルダ2と、アーム11と、シリンダ3とを備え、シリンダ3の伸縮動作で、アーム11を揺動させる。ホルダ2は、走行可能の作業車両1のフレームに固定されている。アーム11の一端には、作業用アタッチメント12が取り付けられ、アーム11の他端は、作業車両1のフレームに回転可能にかつ着脱可能に取り付けられる。シリンダ3のシリンダケース3aがホルダ2に回転可能にピン結合されると共に、ピストンロッド3bがアーム11に連結されている。アーム11を作業車両1から分離する際には、アーム11の他端を作業車両1から離脱させると共に、シリンダ3のピストンロッド3bをアーム11から取り外し、ホルダ2にピン結合させる。
(もっと読む)
作業車両
【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
走行作業機の油圧ローリング制御装置
【課題】本発明では、ローリング油圧シリンダが作動しない状態が長く続いてもオイル漏れなどの支障が生じないようにすることを課題とする。
【解決手段】走行車体に作業機をローリング可能に装着し、ローリング油圧シリンダで作業機をローリング制御する走行作業機の油圧ローリング制御装置において、ローリング油圧シリンダへの圧油供給時間をカウントする油圧作動タイマとローリング油圧シリンダの作動を検出するローリングセンサを設け、該ローリングセンサが所定時間を超えてローリング油圧シリンダが作動しないことを検出するか制御装置からローリング信号が出力されない場合には、ローリング油圧シリンダに僅かのローリング指令を出力すべくして走行作業機の油圧ローリング制御装置を構成した。
(もっと読む)
田植機
【課題】植付部を所定の高さで保持した状態で、植付部から油圧シリンダへ衝撃として急激な力が加えられた場合であっても、当該力を、瞬時に、効率良く吸収することができる田植機を提供する。
【解決手段】走行部10の後部に昇降リンク機構53を介して昇降可能に設けられる植付部40と、昇降リンク機構53に連結して植付部40を昇降する昇降シリンダ54と、植付部40からの衝撃によって昇降シリンダ54に加えられる力を吸収するアキュムレータ65と、を具備する田植機1において、アキュムレータ65は、昇降シリンダ54の上昇側の油室に連通して、昇降シリンダ54に取り付けられるものである。
(もっと読む)
トラクタ
【課題】機械式のポジション制御機構を備えるトラクタにおいて、昇降スイッチによる作業機上昇位置の調整機能を実現するにあたり、センサの追加を不要とし、大幅なコストダウンを図る。
【解決手段】昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段を設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体24の位置を特定すると共に、昇降スイッチレバー23の上昇操作に応じてモータ作動体24を上昇側に作動させる際には、電動モータ25の出力パルスに基づいて特定される上昇側の所定位置までモータ作動体24を作動させ、さらに、上昇側の所定位置を決めるパルス数を上限設定ボリューム29で任意に設定可能とした。
(もっと読む)
トラクタ
【課題】要求精度を満たしつつ、電動モータのロック回数を減らす。
【解決手段】昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段を設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体24の位置を特定すると共に、昇降スイッチレバー23の上昇操作に応じてモータ作動体24を上昇側に作動させる際には、モータ作動体24を上昇側の機械的なロック位置まで作動させ、昇降スイッチレバー23の下降操作に応じてモータ作動体24を下降側に作動させる際には、電動モータ25の出力パルスに基づいて特定される下降側の所定位置までモータ作動体24を作動させる。
(もっと読む)
101 - 110 / 485
[ Back to top ]