
国際特許分類[A01B63/10]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 農業機械または器具を昇降する,あるいは位置を調整する装置またはそのための配置 (864) | トラクタに装着された作業機のためのもの (696) | 水圧あるいは気圧によって操作されるもの (611)
国際特許分類[A01B63/10]の下位に属する分類
トラクタへの装着位置,例.後部,によって特徴づけられるもの (32)
作業機とトラクタ車輪との間の重量移動を制御するためのもの
作業機の作業深さの調整 (93)
動力つり上げリンクへの作業機の装着 (1)
国際特許分類[A01B63/10]に分類される特許
71 - 80 / 485
作業車両
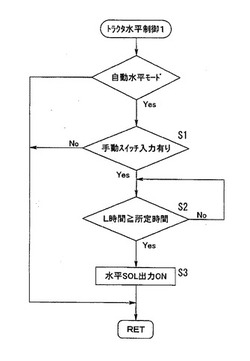
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
作業車両

【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
(もっと読む)
乗用型作業機
【課題】昇降シリンダのような油圧機器を有する乗用型農作業機において、バルブユニットを他の部材に邪魔されずに安全な状態に配置する。
【手段】農作業機は走行機体1と苗植装置とを有する。走行機体1走行ミッションケース13を有しており、走行ミッションケース13にエンジンの動力が入力される。走行ミッションケース13にはHST33と油圧ポンプ41とが左右に振り分けて取り付けられており、また、パワーステアリングユニット32とバルブユニット42とが前後に振り分けた状態で取り付けられている。バルブユニット42を経由して昇降シリンダ6と苗植装置とに圧油が送られる。バルブユニット42は走行ミッションケース13の段部に配置されているため、安全である。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
苗移植機
【課題】
機体の走行により圃場の面積を算出し、算出した面積から苗の植付作業の進捗具合、苗や施肥肥料の使用量、作業に要する時間等を算出可能な苗移植機を提供する。
【解決手段】
後輪2,2の駆動回転を検出する回転検出部材1を設け、回転検出部材1が検出する後輪2,2の回転数から走行距離を算出する走行車体3に苗植装置4を設けた苗移植機において、回転検出部材1の検出結果と、走行車体3の前側に設ける前輪5,5の操向旋回を検出する操向検出部材6の検出結果によって、各植付走行条の走行距離Bと、植付走行条の端部での折返旋回距離Cを算出し、走行距離Bと折返旋回距離Cから苗植付条面積Eを算出する構成とする。
(もっと読む)
作業車両
【課題】対地作業機を牽引する作業車両において、傾き一定制御の実行中に走行機体を旋回させると、遠心力のせいで対地作業機が誤制御されるという問題を解消する。
【解決手段】本願発明の作業車両1は、走行機体2の後部にリンク機構を介して装着された対地作業機24と、該対地作業機24を前記走行機体2に対して左右に傾動させる傾斜制御アクチュエータ32と、前記走行機体2に設けられた傾斜検出手段81及び角速度検出手段82とを備える。前記両検出手段81,82の検出結果に基づく前記傾斜制御アクチュエータ32の駆動によって前記対地作業機24の傾き一定制御を実行するように構成する。前記傾き一定制御の実行中に前記走行機体2を旋回させた場合は、前記両検出手段81,82の検出結果に拘らず、前記対地作業機24が前記走行機体2に対して予め規定された設定角度となるように前記傾斜制御アクチュエータ32を駆動させる。
(もっと読む)
フロントモーア
【課題】モーアデッキが地面から持ち上げられた状態で確実に保持されるようにすること。
【解決手段】機体フレーム1と、車体の前部に配置されるモーアデッキと、モーアデッキを昇降する昇降シリンダ3と、昇降シリンダ3を作動制御する昇降バルブ13と、ミッションケース9とを備え、昇降バルブ13と昇降シリンダ3とを結ぶ油路に、絞り弁と逆止弁とを組み合わせた弁16を設け、弁16を機体フレーム1又はミッションケース9に固定した支持部材26を介して、運転座席の前側の床部の下側に配置し、弁16を操作する操作レバー21を床部から運転座席の側に突出させてある。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
農作業機のリモコン装置
【課題】無線化されたリモコン装置の電源の消費電力を抑える。
【解決手段】リモコン装置100は、電源113と、これをオンオフする電源スイッチ101bと、このオンオフ状態を表示する電源ランプ101cと、農作業機の各種作動を制御する指令信号を送るための指令スイッチ101e等と、農作業機が所定作業可能状態にあるときに点灯する自動可ランプ101fと、各種作動を制御する指令信号データを記憶する記憶部111と、指令スイッチ101e等・電源スイッチ101bのいずれかがオンされると、指令信号データを記憶部から読み込んで通信部に送る制御部110を備え、制御部110は電源ランプ101cと自動可ランプ101fが点灯している時に、電源ランプ101cと自動可ランプ101fの電力消費を抑える省エネモード及び電源ランプ101cを消灯するオートパワーオフモードのいずれかに切り替えるランプモード切替部110bを備える。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
71 - 80 / 485
[ Back to top ]