
国際特許分類[A61F2/70]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 操作または制御手段 (206) | 電気的なもの (118)
国際特許分類[A61F2/70]の下位に属する分類
生体電気的制御,例.筋電によるもの (45)
国際特許分類[A61F2/70]に分類される特許
31 - 40 / 73
歩行能力についての評価方法および評価装置
【課題】少ない歩数においても歩行能力を客観的に評価することができる技術の提供。
【解決手段】マイクロコンピュータによって歩行周期を多段階に分割し、グループ化することを前提とする。義足装着者が歩行訓練をするとき、訓練が進むにつれて、時系列的に取得する歩行周期がグループを超えて変化する傾向が大である。そこで、そのような歩行周期の変化、すなわち、グループあるいはブロックの移動回数や頻度の大きさを歩行能力のための評価指標とすることができる。マイクロコンピュータ機能をもつインテリジェント義足などでは、義足自体が備えるマイコン回路およびセンサ手段などを活用して評価を行うことができる。
(もっと読む)
運動補助装置

【課題】演算処理負荷の軽減を図りながら、当該エージェントの運動を補助することができる装置を提供する。
【解決手段】アクチュエータ15の動作の制御基礎としての基礎振動子ξを生成するための演算処理に一のモデルのみが用いられるので、当該一のモデルに加えて他のモデルが用いられる場合と比較して当該演算処理の負荷が軽減されうる。さらに、モデルからの出力振動信号である基礎振動子ξの角速度または位相の時間変化率に反映される固有角速度ωが、このモデルへの入力振動信号である運動振動子φにより定義されるエージェントPの運動周期Tに基づき、連続的または断続的な減少関数にしたがって流動的に設定される。そして、最新の固有角速度ωにより定義されるモデルにしたがって基礎振動子ξが生成され、この基礎振動子ξに基づいてアクチュエータ15からエージェントPに伝達されるトルクτの振幅および位相が制御される。
(もっと読む)
ノイズ除去装置、ノイズ除去方法および動作補正装置
【課題】時間変化するノイズ信号を除去し得る動作補正装置を提供する。
【解決手段】食事支援装置は、マニピュレータに対する動作に応じた主信号および振戦信号を含む入力信号INを出力する力覚センサと、力覚センサから出力された入力信号INが入力される入力手段15とを備える。また、振戦除去システム18として、全域通過フィルタAPFを適用したノッチフィルタに入力した入力信号INの出力を最小とするタップ係数を更新することで、時間変化する振戦信号の各時刻での周波数に対応する推定周波数ft(i)を決定する振戦周波数推定手段42を備える。そして、振戦周波数推定手段42で決定された推定周波数ft(i)に基づき決定される遮断フィルタにより、振戦除去手段44が入力信号INから振戦信号を除去して出力信号OUTを生成する。
(もっと読む)
歩行補助装置
【課題】駆動機構及びボールネジの短軸化を図ることが可能な歩行補助装置を提供する。
【解決手段】歩行補助装置Aの駆動機構9は、上側リンク部材5に揺動自在に連結される筐体17に支持され、中空電動モータ16により回転駆動されるナット部材20と、ナット部材20に保持されるボール21を介してナット部材20に螺合するネジ溝14aaが外周面に形成され、中空電動モータ16の中空インナーロータ20に形成された貫通穴を挿通する直動出力軸14aとを備える直動アクチュエータ14、及び、下側リンク部材7に第3関節8の関節軸と同軸心に固定され、直動出力軸14aの一端に枢着されたクランクアーム29を有し、直動アクチュエータ14の直動出力軸14aから出力される並進力をクランクアーム29を介して第3関節8の回転駆動力に変換するように構成される。
(もっと読む)
歩行補助装置
【課題】耐久性、回動精度、追従性に優れた歩行補助装置を提供する。
【解決手段】歩行補助装置Aの駆動機構9は、上側リンク部材5に搭載された電動モータ16によりナット部材20,22が回転駆動され、これによりナット部材20,22の軸心方向に直動する直動出力軸14aを備える直動アクチュエータ14、及び、第3関節8の関節軸と同軸心に下側リンク部材7に固定され、直動出力軸14aの一端に枢着されたクランクアーム30を有し、直動アクチュエータ14の直動出力軸14aから出力される並進力をクランクアーム30を介して第3関節8の回転駆動力に変換するように構成される。
(もっと読む)
筋力補助装置の設定装置
【課題】容易に制御式を設定できる筋力補助装置の設定装置を提供する。
【解決手段】筋力補助装置の設定装置1は、使用者の筋力を補助するための筋力補助装置10を設定するための設定装置である。筋力補助装置の設定装置1は、使用者51の動作Mhを計測する3次元動作計測装置2と、3次元動作計測装置2によって計測された動作Mhから補助対象の筋肉の発揮力Fmを算出する筋骨格シミュレータ3と、発揮力Fmに基づいて、筋力補助装置10が使用者51に作用させる補助力Fsを制御するための制御式のパラメータを算出する制御部4とを備えている。
(もっと読む)
アシスト装置
【課題】エージェントに違和感を覚えさせないようにその運動を補助することができるアシスト装置を提供する。
【解決手段】アシスト装置1によれば、バッテリ残量(電源によるアクチュエータ12への供給可能電力)SOCが第1閾値SOC1以下であることを要件として、バッテリ残量SOCが第1閾値SOC1を超えている場合と比較して低く、かつ、バッテリ残量SOCが低くなるほど低くなるようにアクチュエータ12の出力が調節される(図3/STEP006,STEP018,図4参照)。アクチュエータ12の出力はバッテリ残量SOCに基づいて制御されるので、アクチュエータ12の出力変化によりバッテリ残量SOCの変化をエージェントに認識させ、その結果としてその後に続くアシスト装置1の動作停止に対する違和感をエージェントに覚えさせる事態が回避されうる。
(もっと読む)
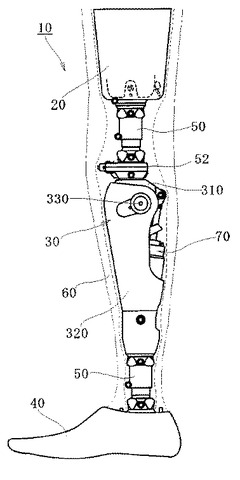
膝上部肢切断患者用の駆動源付き義足
【課題】膝上部肢切断患者のための、駆動源を有する義足の開発。
【解決手段】駆動源付き義足10は、膝部材12、膝部材12の上方に設けられたソケット接続具22、その下に人工の足20が連結される底端部を有する細長い下腿部材14およびリニア・アクチュエータ16を備える。第1の枢動アセンブリによって、下腿部材14を膝部材12に動作的に連結することができる。第2の枢動アセンブリによって、アクチュエータ16の上端部を膝部材12に動作的に連結することができる。第3の枢動アセンブリによって、アクチュエータ16の底端部を下腿部材14の底端部に動作的に連結することができる。義足10は、前部アクチュエータ構造または後部アクチュエータ構造のどちらの構造でも可能である。
(もっと読む)
アシスト装置
【課題】エージェントに違和感を覚えさせないようにその運動を補助することができるアシスト装置を提供する。
【解決手段】アシスト装置1によれば、バッテリ残量SOCが第1閾値SOC1以下であることを要件として、アシスト装置1による運動補助率が、バッテリ残量SOCが第1閾値SOC1を超えている場合よりも低くなり、かつ、運動補助可能時間Tassが短いほど低くなるようにアクチュエータ12の出力が調節される。アクチュエータ12の出力はアシスト装置1の運動補助可能時間Tassに基づいて制御されるので、アクチュエータ12の出力変化によりアシスト装置による運動補助可能時間Tassの変化をエージェントに認識させ、その結果としてその後に続くアシスト装置1の動作停止に対する違和感をエージェントに覚えさせる事態が回避されうる。
(もっと読む)
指用動作補助装置
【課題】体格差などの寸法合わせをあまり必要とせず、また正確な位置合わせを行わなくても装着が可能な指用動作補助装置を提供すること。
【解決手段】本発明の指用動作補助装置は、ワイヤーガイド群30として、指骨10の掌側に位置する第1ワイヤーガイド群31と、指骨10の背側に位置する第2ワイヤーガイド群32とを設け、ワイヤー40を、末節骨11に位置する指保持部材20に固定し、ワイヤー40として、第1ワイヤーガイド群31に挿通した第1ワイヤー41と、第2ワイヤーガイド群32に挿通した第2ワイヤー42とを設け、駆動部53、54では、第1ワイヤー41を引っ張るときには第2ワイヤー42を緩め、第2ワイヤー42を引っ張るときには第1ワイヤー41を緩めることを特徴とする。
(もっと読む)
31 - 40 / 73
[ Back to top ]