
国際特許分類[A63H11/20]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 自動式形象玩具 (332) | 実際的な歩行運動をする形象玩具 (125) | 数対の足を有するもの,例.馬 (18)
国際特許分類[A63H11/20]に分類される特許
1 - 10 / 18
移動玩具
【課題】安価で且つ変化に富む遊びができる移動玩具を提供すること。
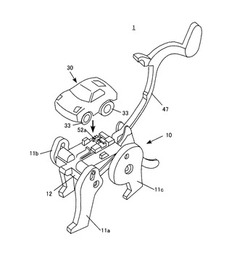
【解決手段】動力源を有しない第1の移動体10に、動力源31、及び、この動力源31の動力によって駆動される駆動輪33を有する第2の移動体30を搭載して固定することによって、第2の移動体30の動力源31を利用して、第1の移動体10を移動させるようにすることで、安価で且つ変化に富む遊びができる移動玩具を実現した。
(もっと読む)
動力伝達機構及びこの動力伝達機構を使用したロボット

【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを水中での推進力を得るロボットとしとして提供する。
【解決手段】回転軸5a,5b,5cには、第1の揺動板8が等間隔で配され、この第1の揺動板8が回転軸5a,5b,5cに対する傾斜角度は同じで、回転軸5a,5b,5cに対する取り付け方向(「位相」)が順に規則的にずれて配されている。
(もっと読む)
前方偏心ウェイトを有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。振動駆動部は、モータ210と、偏心ウェイト202と、を有し、偏心ウェイトは、前脚部104aの前方に配置されている。 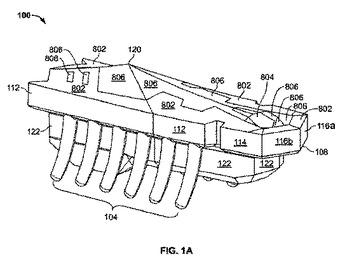 (もっと読む)
(もっと読む)
振動モータ及び2列の脚部を有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物の本体部122と乗物の脚部との間には、空間、特にV字状の凹所があり、脚部は、正立回転中に内方に曲がる及び/または、脚部の列は、振動駆動部の回転軸の側部に位置する。 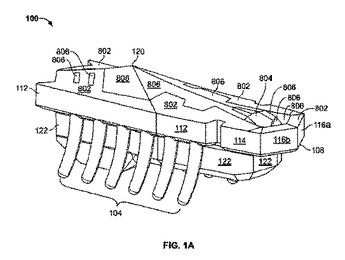 (もっと読む)
(もっと読む)
振動モータを有する乗物、特に自己正立する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物は、振動モータの回転トルク205の効果によって回転して自身で正立するように構成されている。これは、例えば、本体部のまたは乗物の重心502を振動モータ202、210の回転軸に近接してまたは回転軸上に位置付けるように構成することによって達成される。 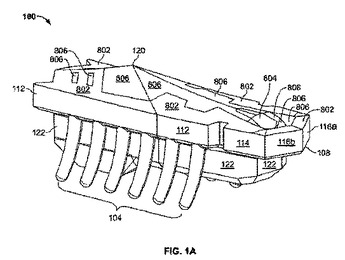 (もっと読む)
(もっと読む)
動力伝達機構およびこの動力伝達機構を使用したロボット
【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを多足歩行の玩具等に適用した駆動力推進構造体として提供する。
【解決手段】回転軸5には、第1の揺動板8が等間隔で複数配され、この複数の第1の揺動板8が回転軸5に対する傾斜角度θ1は同じで、回転軸5に対する取り付け方向(「位相」)が順に規則的にずれて配されている。図1は、ムカデのような多足歩行玩具として、上記動力伝達機構D1を有する駆動力推進構造体(多足歩行の玩具)1に適用した例である。
(もっと読む)
歩行玩具
【課題】単に前足と後足とを動かして前進するだけではなく頭部を動かしながら歩行させることができるとともに、頭部を交換することにより頭部の動きが異なり、飽きのこない歩行玩具を提供すること。
【解決手段】頭部4を揺動させながら前足2と後足3とを前後に回動させて歩行する、以下の要件を備えることを特徴とする歩行玩具。
(イ)前記頭部4は玩具本体1に着脱可能であること
(ロ)玩具本体1には前足2と後足3とに設けた支軸12、16を回動可能に支持する軸受13、17を設けたこと
(ハ)上記前足2の支軸12は上記頭部を揺動駆動する駆動部材22が着脱可能に形成されていること
(ニ)上記前足2が回動すると上記支軸12に装着した駆動部材22は前足2と連動して回動すること
(ホ)上記駆動部材22は上記頭部4に係合し、前足2の回動に連動して頭部4を揺動させること
(もっと読む)
歩行玩具
【課題】構造が簡素で、かつ躍動感が得られる歩行玩具を提供すること。
【解決手段】玩具本体に少なくとも1組の左右の脚が設けられ、前記少なくとも1組の左右の脚が互いに連結部材で連結されるとともに、該連結部材の左右方向の中央部に上下方向に延びる軸が立設され、該軸が前記玩具本体の固定部に支持されており、該軸の軸心を中心にして前記連結部材を回動させて前記少なくとも1組の左右の脚を交互に前後に動作させる脚動作手段を備える歩行玩具であって、前記脚動作手段は、前記連結部材の前記軸とは離れた位置で回り対偶をなしモータ動力又はゼンマイ動力によって揺動して該連結部材を前記軸の軸心を中心に回動させる揺動リンクを含んで構成され、前記少なくとも1組の左右の脚において、前記軸は、前記揺動リンクの揺動によって上下方向に対して傾き角が変化するように前記玩具本体に支持され、該左右の脚の足裏が交互に接地するように構成されている。
(もっと読む)
ペット型ロボット
【課題】散歩するペット型ロボットが共に散歩する人間から遠く離れてしまい交通の妨げとなったり、通行人の通行の障害にならないようにして、散歩する人間の足元近くに位置して共に散歩行動することのできるペット型ロボットを提供する。
【解決手段】通信部を介したユーザの指示に基づいた指示信号によるペットロボット本体の方向性、スピード調整および停止、並びにペットロボット本体が犬締結ヒモ程度の長さの範囲を越えることを示す信号を入力してペットロボット本体を一時停止させる制御を行う行動制御信号を生成させ、行動制御信号によって行動駆動部を駆動制御してペットロボット本体をユーザから犬締結ヒモ程度の範囲で散歩行動させる人工知能部を有する。
(もっと読む)
縫いぐるみ
【課題】手触りの良い柔軟性のある縫いぐるみであって、使用者が、引紐を把持して歩行すると、縫いぐるみが、恰も歩行しているかのような動作を行わせる趣向の高い縫いぐるみを提供する。
【解決手段】4つ脚を有する動物を模した形に形成され、その内部に中綿を詰めた柔軟性を有する縫いぐるみであって、縫いぐるみは、頭部24と、胴体部22と、左右の前脚部12と、左右の後脚部16とを有し、胴体部の内部に背骨部材32を有し、背骨部材の前端に前脚部材取付部40を備え、背骨部材の後端に後脚部材取付部46を備え、前脚部先端に設けた前脚先端部材52と前脚部材取付部とを接続する前脚部材34として弦巻バネを内蔵し、後脚部先端に備えた後脚先端部材58と後脚部材取付部とを接続する後脚部材36を内蔵し、首部分に引紐30を備えた。
(もっと読む)
1 - 10 / 18
[ Back to top ]