
国際特許分類[A63H17/39]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 乗物玩具,例.自動式のもの;その付属品 (356) | 細部;付属品 (252) | 乗物玩具のための方向変換装置 (114) | リモートコントロールされるもの (75) | 無線でコントロールされるもの (67)
国際特許分類[A63H17/39]に分類される特許
51 - 60 / 67
ラジオコントロールカー
【課題】 従来のラジオコントロールカーにおけるブレーキ機構にあっては、ブレーキ機構を作動させた場合には、前後輪に対して同時に同じブレーキ力が作用されるために、直進状態にある車体は路面に対して横滑りすることなく停止可能であるが、ステアリングを操作してカーブを曲がるような走行を行なっている状態でブレーキを掛けた場合に、前後輪に同じブレーキ力が作用すると慣性力によって横滑り状態となってコースから外れてしまうといった問題があった。
【解決手段】 送信機からのブレーキ信号によってサーボが動作して前後輪にブレーキを掛けるようにした4輪駆動型ラジオコントロールカーであって、前記ブレーキは前輪側を操舵するステアリングサーボ14によってステアリング角度が生じている状態において、前輪側のブレーキによる制動力を後輪側の制動力よりも弱くするようにしたラジオコントロールカーである。
(もっと読む)
自動車玩具用シャーシとそれを備えた無線操縦自動車玩具

【課題】コーナーリング時の旋廻性を向上させ、走行中に生じた変形の回復を容易にして走行特性を安定させることが可能なシャーシとそれを備えた無線操縦自動車玩具を提供することを目的とする。
【解決手段】シャーシ1は略左右対称の平板形状のメインシャーシ2と、前輪3を取り付け可能な前構造体4と、後輪5を取り付け可能な後構造体6と、メインシャーシ2の平板面に直交するとともにその対称軸上に配置された略平板状のフレーム7とを備え、メインシャーシ2は略水平に配されるとともに、その上面にはサーボモータ8と、受信装置9と、モータ10と、スピードコントローラ11と、バッテリ12が搭載され、その前端及び後端には前構造体4と後構造体6がそれぞれ配設され、フレーム7は前端が連結部13aを介して前構造体4に連結され、後端が連結部13bを介して後構造体6に連結されている。
(もっと読む)
遠隔操作玩具システム、及びその駆動機器
送信機(1)によって遠隔操作される駆動機器(2)は、第1のパラメータ(D)及び第2のパラメータ(L)を保持し、第1のパラメータ(D)に基づく攻撃信号を送信し、受信した特定信号に含まれる情報に応じて第2のパラメータ(L)を変化させる。送信機(1)及び駆動機器(2)は、他の一対の駆動機器(2)及び送信機(1)を対戦相手とし、駆動機器(2)は他の駆動機器(2)から送信される攻撃信号を特定信号として受信し、該特定信号に含まれる前記情報に応じて第2のパラメータ(L)を変化させる対戦遊戯が実現できる遠隔操作玩具システムにおいて、送信機(1)はユーザによる特定の操作に応じた特定情報を制御信号に含ませ、駆動機器(2)は、制御信号に含まれる特定情報に基づいて自己の第1のパラメータ(D)を変化させる。 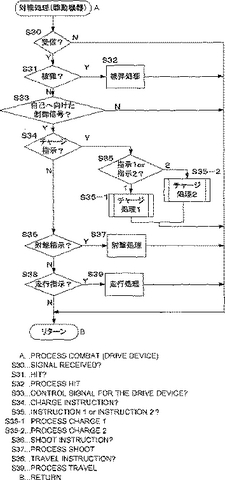 (もっと読む)
(もっと読む)
模型用走行装置、並びにその走行装置を備えた模型及び遠隔操作玩具
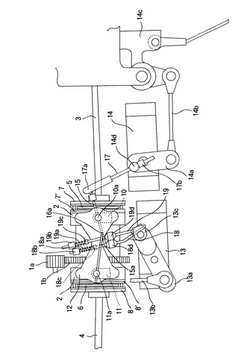
一対のモータ(7)と、一対のモータ(7)により個別に駆動される左右一対の車輪(8)と、速度及び方向に関して与えられる指示に基づいて一対のモータ7のそれぞれの動作を制御する制御装置(20)とを備える模型用走行装置(6)において、制御装置(20)は、指示された速度(Vm)が低速域(L、M)にある間は一対のモータ(7)が指示された方向へ交互に回転し、指示された速度が低速域よりも高い高速域(H)にある間は一対のモータ(7)が指示された方向へ同時に回転するように一対のモータ(7)を制御する。 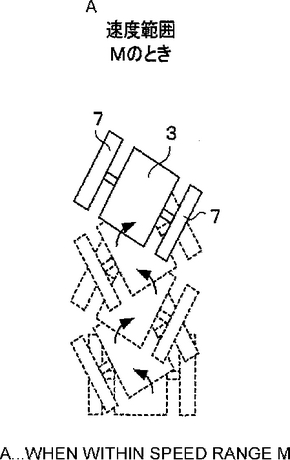 (もっと読む)
(もっと読む)
移動装置検知システム
【課題】移動装置の通過時の情報を計測する移動状態測定システム及び移動装置並びに移動状態測定方法に関し、簡易に、かつ、正確に移動装置の通過時間を測定できる移動状態測定システム及び移動装置並びに移動状態測定方法を提供することを目的とする。
【解決手段】本発明は、コース(121)上に設定された所定のトラック(122−1〜122−n)上を移動する移動装置(112−1〜112−n)と、所定のコース(121)上に設けられ、移動装置(112−1〜112−n)が通過したことを検出する通過検出装置(111)とを有する移動装置検知システムにおいて、移動装置(112−1〜112−n)を個別に識別する識別情報に応じた識別手段(311)を有し、通過検出装置(111)は、識別手段(311)を検知することにより、移動装置(112−1〜112−n)の通過及び識別情報を検知することを特徴とする。
(もっと読む)
無線操縦式二輪車玩具
前輪支持体を操舵角自在となるよう様に車体に装着され、人形部を車体上部に揺動可能に取り付け、この人形部を無線操縦により進行方向に対して垂直且つ車体に対して水平方向に平行移動させて、前記人形の並行移動による重心の移動で前輪支持体を傾倒させて操舵し、この人形の移動制御部と二輪車の走行制御が無線操縦による無線操縦式二輪車玩具において、人形の移動制御部は二輪車中央に搭載されて、人形を駆動する駆動部が人形胴体部に刻設された穴部に遊嵌する無線操縦式二輪車玩具を提供する。 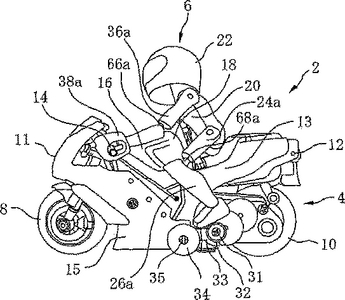 (もっと読む)
(もっと読む)
移動状態測定システム及び移動装置並びに移動状態測定計時方法
【課題】移動装置の通過時の情報を計測する移動状態測定システム及び移動装置並びに移動状態測定方法に関し、簡易に、かつ、正確に移動装置の通過時間を測定できる移動状態測定システム及び移動装置並びに移動状態測定方法を提供することを目的とする。
【解決手段】本発明は、所定の経路(121)上を移動する移動装置(112−1〜112−n)と、所定の経路(121)上に設けられた通過位置(P)を通過したことを移動装置(112−1〜112−n)に通知する通過通知手段(111)とを有し、移動装置(112−1〜112−n)は通過通知手段(111)により通過位置(P)を通過したことを検出したときに通過時の情報を保存することを特徴とする。
(もっと読む)
遠隔操作型走行玩具
【課題】 進路を照明し続けうる遠隔操作の照明手段と点滅しうる遠隔操作の照明手段とを含むヘッドライト装置を備えた新規の遠隔操作型走行玩具を提供するを提供するものである。
【解決手段】 遠隔操作器を用いて離れた位置から操作しうるヘッドライト装置を備えた遠隔操作型走行玩具に関し、連続照明発光体として機能するヘッドライト2と点滅照明発光体として機能するフラッシュライト3を並べて設けられた左右一対のヘッドライト装置4、5を車体6の正面左右両側個所に装備し、舵取制御用操作部、速度制御用操作部、ヘッドライトの点灯・消灯制御用操作部及びフラッシュライトの点灯・消灯制御用操作部を備えた遠隔操作器により前記照明手段を遠隔操作しうるようにされたことを特徴とする。
(もっと読む)
走行玩具
【課題】 動力伝達ロスが少なく安定的に動力を伝達することができる遠心クラッチを備える走行玩具を提供すること。
【解決手段】 遠隔制御によって正逆回転可能に構成された操舵用直流モータと、前記操舵用直流モータの動力によって車体の左右に動作して車輪の向きを変えるための操舵アームとを備えた走行玩具において、前記操舵アームにはラック歯が形成され、前記操舵用直流モータの軸には前記ラック歯に噛合するピニオン歯車が遠心クラッチを介して付設されていることを特徴とする。
(もっと読む)
無線操縦式二輪車玩具
前輪支持体を操舵角自在となるよう様に車体に取り付け、人形部を車体上部に揺動可能に取り付け、この人形部を無線操縦により進行方向に対して垂直且つ車体に対して水平方向に平行移動させて、前記人形の並行移動による重心の移動で前輪支持体を傾倒させて操舵する無線操縦式二輪車玩具において、前記前輪支持体は、車体に接続される接続部と前記接続部と特定の角度を持ってその端部同士が接合されて水平方向が長軸となる長円の貫通孔を上部に備える長円筒状体とを備えるフロントフォーク接合部と、前記貫通孔に挿入されて回動及び揺動可能に固定される結合ピンと前記結合ピンが上部から突出されるブラケットと前記ブラケット下部に設けられてその間にタイヤが備えられる2本の軸部とを備えるフロントフォークと、からなる無線操縦式二輪車玩具を提供する。 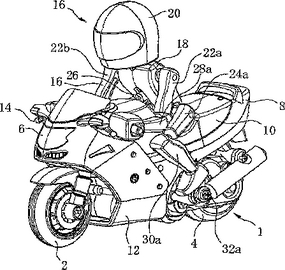 (もっと読む)
(もっと読む)
51 - 60 / 67
[ Back to top ]