
国際特許分類[A63H30/00]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 玩具,例.乗物玩具に特に適したリモートコントロール装置 (189)
国際特許分類[A63H30/00]の下位に属する分類
電気的装置 (161)
水力圧利用または空気圧利用装置 (7)
国際特許分類[A63H30/00]に分類される特許
1 - 10 / 21
リモートコントロール装置
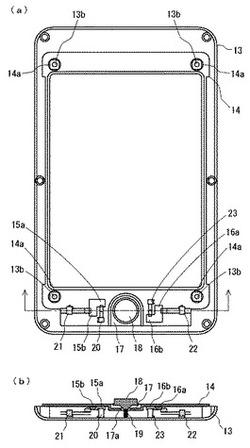
【課題】従来のリモートコントロール装置にはない新しい操作感を得られ、しかも直感的に操作できるリモートコントロール装置を提供する。
【解決手段】透明な板部材14を枠体11で保持して構成されるリモートコントロール装置10であって、前記板部材14が前記枠体11に対してスライド可能に保持されるとともに、前記枠体11の内部にはスイッチ20〜23が設けられており、前記板部材14には前記板部材14がスライドしたときに前記スイッチ20〜23を押下するスイッチ押下部15a、15b、16a、16bが設けられている。
(もっと読む)
玩具セット

【課題】 タッチパネルを有した電子装置と連携して作動する玩具セットを提供する。
【解決手段】 ディスプレイ55上を自走する玩具11を、例えば、犬形状玩具を繋留する引き紐を模して形成した導電部材を含む紐部材14を介して電子装置に電気的に結合することで閉回路を形成し、自走玩具位置に対向するタッチパネル53の導電膜部分の静電容量変化の検出を可能にする。電子装置には自走する玩具11に関連する遊戯シーンをディスプレイに表示するプログラムや玩具11の走行を誘導する信号を表示するプログラムが搭載されており、玩具の走行とディスプレイに表示される遊戯シーンが相互に連携して遊戯の流れが進行する。紐部材14の電子装置への電気的結合はプラグ形状の導電部材を、差込口(音声ジャック)に装着するか遊戯者が散歩中の犬の引き紐を持つように保持することで実現される。
(もっと読む)
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置が提供される。上記リンケージ装置は、サーボステアリングエンジン動作システム、テールモーター動作システム、及び受信機制御装置(4)を備えている。上記サーボステアリングエンジン動作システムは、前後動サーボステアリングエンジン動作ユニット、及び左右動サーボステアリングエンジン動作ユニットを備えている。上記受信機制御装置(4)は、上記サーボステアリングエンジン動作システム及び上記テールモーター動作システムに同時接続され、上記前後動サーボステアリングエンジン動作ユニット及び上記テールモーター動作システムが同時に協働して作動するように制御可能になっている。従来の3チャンネルまたは4チャンネル模型ヘリコプターと比較して、本発明を適用した、同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターは、風抵抗の性能が優れており、屋外の風に対し速く飛行可能という要件を満たす。 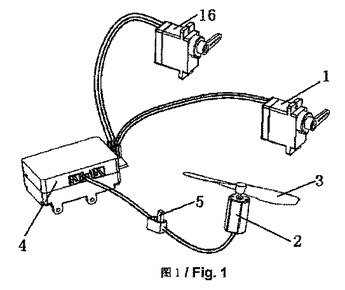 (もっと読む)
(もっと読む)
尾輪式ラジコン飛行機の直進滑走装置
【課題】尾輪式ラジコン飛行機の直進滑走性を向上さすための装置を提供する。
【解決手段】ラダーサーボ(25)に取り付けたサーボホーン(26)の右端と左端にロッドアジャスター(13)を連結する。前記ロッドアジャスターに一体型の作動ロッド(21)と連結作動管(20)を連結し、下部ギア断続ロッド(15)等の各構成部品を介して同軸ギア(9)までを連動(連結)させ、前記同軸ギアと主輪ギア(8)を断続させるものである。前記同軸ギア(9)と主輪ギア(8)が、送信機のラダーステックをコントロールしないか、コントロールをすることによって断続し、左右の主輪(2)が同一回転するか、独自に回転する装置である。同軸ギア(9)と主輪ギア(8)とが連結(圧着)すれば、本機が直進滑走し、前記両ギアを離せば、地上走行時に本機の左右方向転換が容易に出来る。
(もっと読む)
ラジコンシステム
【課題】ラジコン自動車の操縦をやさしくまた楽しくするために、前進走行の操縦と後進走行の操縦を同じ感覚で操縦できるようにすることで、狭い場所での機首方向変更をやさしくする。
【解決手段】操縦器または自動車は、操縦器からの走り信号が後進であることを検出したとき、操縦器からの操舵信号の左操舵と右操舵を反転して自動車に送るので、前進でも後進でも同じ感覚で操縦できるようになり、狭い場所での方向転換も操舵は一定のままで、走行レバーを前進と後進を繰り返させるだけで方向転換するようになる。
(もっと読む)
頭部運動による入力装置及び方法
【課題】ロボットや無線操縦機器などの産業・娯楽機器や、電動車椅子や電子文字盤などの福祉機器を直観的なインターフェースで操作することが望まれているが、習得が難しい問題や、利用制約が大である問題があった。
【解決手段】操作者のジョイスティック的な頭部運動を検出する傾斜センサ等を、頭部に装着し、ヘッドマウントディスプレイ等で表示することにより、直観的なインターフェースで、外部機器や仮想空間の物体を操作できる。
(もっと読む)
コースパーツ、及び移動玩具システム。
【課題】移動玩具が移動の際にコースに設定されたデータを適切に読み取れるようにする。
【解決手段】移動玩具10が移動する走行面CPB1〜CPB16を有するコース60を構成するコースパーツCP1〜CP16であって、コースの走行面又は壁面63L、63R、64L、64Rの第1の領域CPBR1には、移動玩具がデータを読み取るための複数のデータマーカDM1〜DMnが設けられ、走行面又は壁面の第2の領域CPBL1には、データをサンプリングするためのクロックを移動玩具が読み取るための複数のクロックマーカCM1〜CM16が設けられる。このとき、複数のデータマーカは、第1の領域において、第1の方向D1に沿って設けられ、第1の方向に対して垂直方向を第2の方向D2とした場合に、複数のクロックマーカは、第1の領域の第2の方向に設けられた第2の領域において、第1の方向に沿って設けられる。
(もっと読む)
搭載型無人飛行機回収装置及び搭載型無人飛行機回収装置を備えた無人飛行機
【課題】十分な滑走着陸場所の得られない場合の無人機の回収において、無人機の損傷を回避、低減化し、また同時に周囲の器物を損傷させない衝撃吸収用バルーンを用いた無人機回収装置を提供する。
【解決手段】無人機1に搭載される無人機回収装置15は、気体を流入されて膨らむバルーン7と、バルーン7を膨らませる気体を流出するガスボンベ10と、ガスボンベ10からバルーン7へ気体が流入する流路となるエアーチューブ9と、流路の途中に設けられ、閉状態を維持することによりガスボンベ10らバルーン7への気体の流入を阻止するとともに、開状態を指示する電磁弁開放信号を入力すると、閉状態から開状態となってガスボンベ10からバルーン7へ気体を流入させる電磁弁8と、電磁弁開放信号を生成して電磁弁8に出力することにより閉状態の電磁弁8を開状態にさせるコントローラ11とを備えた。
(もっと読む)
ラジオコントロールカーの操舵制御装置
【課題】 ポテンションメータを回転させる減速ギアを介してサーボモータのポテンションメータ軸を回転させると、減速ギアでの各ギアどうしの隙間等による噛合度合いの関係でタイロッドの変位量とポテンションメータ軸の回転量に誤差が生じ、送信機より指令した前輪の操舵角と実際の前輪の操舵角とにずれが生じるといった問題があった。
【解決手段】 受信機よりの制御信号で制御されるモータ91の回転量を減速ギア94を介してタイロッド4を変位して前輪の操舵角を変化させ、該タイロッドの移動量をポテンションメータ92に直接伝達して出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御するラジオコントロールカーの操舵制御装置である。
(もっと読む)
走行玩具用操舵制御装置及び走行玩具
【課題】自律的に前方の障害物との衝突を回避することのできる走行玩具用を提供する。
【解決手段】操舵装置20によって前輪2c,2cの向きを変える走行玩具1の操舵制御装置18であって、異なる波長の赤外線λ1,λ2を発する発光部11,12と、前記走行玩具1の前方斜め左右方向の障害物によって反射した赤外線λ1,λ2の反射光を受光する受光部13と、受光部13が受光した赤外線の波長に応じて前輪2c,2cの向きを所定の時間だけ前記障害物との衝突を回避する方向に変えるよう操舵装置20を制御するコイル通電制御部19とを備える。
(もっと読む)
1 - 10 / 21
[ Back to top ]