
国際特許分類[B21D43/05]の内容
処理操作;運輸 (1,245,546) | 本質的には材料の除去が行なわれない機械的金属加工;金属の打抜き (27,619) | 本質的には材料の除去が行われない金属板,金属管,金属棒または金属プロフィルの加工または処理;押抜き (11,126) | 金属板,金属管または金属プロフィルを加工または処理するための装置内に組み込まれあるいはその中に配置され,あるいは関連して使用するために特に適応された給送,位置決め,または貯蔵装置;切断装置との組合せ (728) | ダイスまたは工具のストロークと関連した被加工物の送り (393) | 被加工物に対して機械的に係合する手段によるもの (277) | 多行程のプレスのために特に適応させたもの (146)
国際特許分類[B21D43/05]に分類される特許
1 - 10 / 146
サーボトランスファプレスシステム
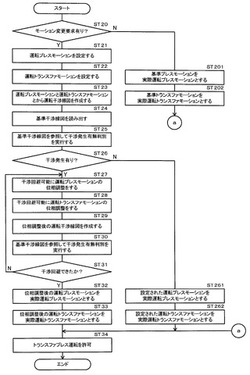
【課題】干渉回避ができかつ操作性の優れたサーボトランスファプレスシステムを提供する。
【解決手段】マスター位相信号に同期させたプレス用個別位相信号およびトランスファ用個別位相信号を生成可能で、プレス用個別位相信号に基づく基準プレスモーションでプレス運転可能かつトランスファ用個別位相信号に基づく基準トランスファモーションでトランスファ運転可能に形成され、基準干渉線図作成手段と基準干渉線図記憶手段と運転干渉線図作成手段と干渉発生有無比較判別手段と個別位相信号相対関係調整手段とを設け、モーション変更に対して自動的なモーション間位相調整を行うことで干渉がないトランスファプレス運転ができる。
(もっと読む)
把持検出センサ

【課題】試料の把持ミスや把持位置姿勢を、少数の電極間の電気導通の有無を用いるだけの簡単な原理と構成で把持ミス・把持位置姿勢のずれを確実に検出することができる把持検出センサを提供する。
【解決手段】導電性のある試料5をマニピュレータで搬送する際、マニピュレータフィンガに取り付けた印加電極3と複数のモニタリング電極41a〜41f間での試料5を介した電気導通の有無をモニタリングすることにより試料5の把持ミス及び把持位置姿勢のずれを検出する把持検出センサ。
(もっと読む)
多段式鍛造プレス機のトランスファー装置
【課題】ワークの搬送トラブルを小さい段階で確実に検出することができ、そのトラブルの原因を追求し分析することが容易にできるようにする。
【解決手段】開閉動作するフィンガー10を有した複数のチャック機構CH(CH0〜CH3)と、チャック機構を往復動させてワークを前工程から後工程へと順次移動させるトランスファー駆動ロッド3及びトランスファービーム4とを備えた多段式鍛造プレス機のトランスファー装置1において、チャック機構のフィンガーが動作する際の可動部分の変位を検出するチャック機構変位センサ50と、チャック機構を移動させるための移動機構の可動部分の変位を検出する移動機構変位センサ60と、チャック機構変位センサの検出データと移動機構変位センサの検出データとを一緒に時系列の波形データとして表示部110に表示させる制御部100とを備える。
(もっと読む)
ワーク搬送装置
【課題】ラックを含むフィードバーの重量を軽減することで、フィードバーをスピーディに水平走行動作できるワーク搬送装置を提供。
【解決手段】スライドガイド14に水平に保持されてその長手方向所定位置にワーク保持部50が設けられたフィードバー20を、少なくとも軸方向前後に走行動作させることで、所定位置のワークを他の所定位置まで順次搬送するワーク搬送装置10で、軸方向前後水平送り機構Bを、フィードバー20の一側面に形成した軽量素材製のラック22と、スライドガイド14に設けたスライドベース30に配設した駆動側の複数のプーリ34と、複数のプーリ34に巻装されてラック22と噛み合う駆動側の歯付無端ベルト36で構成した。少なくともラック22を軽量素材で構成したので、ラック22を含むフィードバー20の重量が従来より軽減されて、フィードバー20の軸方向への走行がスピーディとなる。
(もっと読む)
ワーク保持装置の着脱支持機構及びワーク保持装置交換支持装置
【課題】 簡単かつ低コストで、軽量コンパクトな構成でありながら、ワークを保持するワーク保持装置をクロスバーに対して着脱可能に支持させることができるワーク保持装置の着脱支持機構を提供する。
【解決手段】 本発明は、クロスバー10に着脱可能に支持されてワークを保持・解放するワーク保持装置20の着脱支持機構であって、ワーク保持装置20側のガイドピン32と、クロスバー10側のガイドピン穴51と、を係合させることにより、ワーク保持装置20とクロスバー10との間で位置決めを行う一方、ワーク保持装置20とクロスバー10との相対移動を利用して前記位置決め位置にてこれらを係止させるラッチ機構54を備え、ラッチ機構54により係止させることでワーク保持装置20をクロスバー10に支持させ、ラッチ機構54による係止を解除することでワーク保持装置20をクロスバー10から解放可能したことを特徴とする。
(もっと読む)
部品製造ラインの設計支援方法及び設計支援システム
【課題】部品製造装置と、該部品製造装置に対してワークを搬入及び/又は搬出するロボットとが備えられた部品製造ラインにおいて、前記部品製造装置の周辺設備等との干渉を回避しながら、前記ロボットの搬送能力を有効に活用して、生産性を向上させる。
【解決手段】ロボットのアーム先端部に設定された基準点の移動経路を規定するための必要最小限の制御点を設定する制御点設定工程と、前記部品製造装置に対してワークを搬入及び/又は搬出する際に、該部品製造装置の周辺設備との干渉を生じない該装置内でのワークの配置領域を規定するSPM曲線を作成するSPM曲線作成工程と、前記制御点設定工程で設定した制御点と、前記SPM曲線作成工程で作成したSPM曲線と、成形対象のワーク形状とに基づき、該ワークを搬送する際のロボットの搬送モーションを決定する搬送モーション決定工程とを実行する。
(もっと読む)
ワーク搬送装置
【課題】プレス装置間の幅を短くし、その上で高速搬送することができるワーク搬送装置を提供する。
【解決手段】フレーム2と、フレームに基端が昇降可能にガイドされると共に、フレームに対し基端が揺動可能に連結されている第1アーム3と、第1アームを昇降させる昇降駆動機構4と、第1アームを揺動させる第1揺動駆動機構5と、第1アームに基端が長手方向に移動可能にガイドされると共に、第1アームに対し基端を揺動可能に連結されている第2アーム6と、第2アームを移動させる移動駆動機構7と、第2アームを揺動させる第2揺動駆動機構8と、第2アームの先端付近に、第2アームに対して揺動可能に連結されたワークの保持手段9と、昇降駆動機構、第1揺動駆動機構、移動駆動機構および第2揺動駆動機構を制御する制御装置29とを備えたワーク搬送装置1。
(もっと読む)
部品ハンドリング装置、システム及び方法
【課題】部品をハンドリングするため、例えば、プレス・ラインに部品をローディング及びアンローディングするために使用される部品ハンドラ装置を改善する。
【解決手段】部品ハンドラは、二つの産業用ハンドラまたはロボットの内の第一に、取り付けられて設けられ、且つ前記産業用ハンドラのベースと、前記産業用ハンドラのグリッパG手段を有するエンド・エレメントとの間の、動力学的なチェインを形成する。この部品ハンドラは、前記産業用ハンドラのアームのエンド・エレメントに接続されるようにデザインされたリジッドなアーム、及び、前記産業用ハンドラのエンド・エレメントに対する、前記リジッドなアームの径方向の動きのための、少なくとも一つのスイベル手段2を、更に有している。
(もっと読む)
プレス成形システムおよびプレス成形システムの制御方法
【課題】成形を行う複数のプレス装置と成形品の搬入・搬出を行う移載装置の制御方法に関し、移載装置に関する信号線の設置工事の必要が無いか簡略化できるプレス成形システムおよびプレス成形システムの制御方法を提供する。
【解決手段】成形を行うプレス装置13が複数配設され、成形品Pの搬入・搬出を行う移載装置14が前記複数配設されたプレス装置13に対応する位置に移動可能に設けられたプレス成形システム11において、移載装置14に搭載され移載装置14の制御を行う制御装置21と、前記制御装置21に接続される無線送受信器30と、プレス成形システムの制御を行う制御装置22と、前記制御装置22に接続される無線送受信器25とが設けられ、前記制御装置21と前記制御装置22との間で、双方向の無線通信を行う。
(もっと読む)
トランスファ装置
【課題】1本のフィードバーで3次元動作を行うとともにコンパクトに構成して、プレス機を高速に稼働できるトランスファ装置を提供すること。
【解決手段】トランスファ装置10は、下板13と上板14とを有する固定ユニット11と移動板25を有する可動ユニット20とを備えて構成する。固定ユニット11には、移動板25を昇降するクランク機構15と、フィードバー21をアドバンス・リターン方向Xに移動する移動駆動機構18の駆動部19と、を備えている。可動ユニット20には、1本のフィードバー21とフィードバー21の長手方向に並列する複数のフィンガアーム22とを備えている。フィードバー21は、フィンガアーム22の金型方向への下傾を防止するために、フィードバー21を下方に押圧するフィードバーロック装置27を構成している。
(もっと読む)
1 - 10 / 146
[ Back to top ]