
国際特許分類[B21D43/18]の内容
処理操作;運輸 (1,245,546) | 本質的には材料の除去が行なわれない機械的金属加工;金属の打抜き (27,619) | 本質的には材料の除去が行われない金属板,金属管,金属棒または金属プロフィルの加工または処理;押抜き (11,126) | 金属板,金属管または金属プロフィルを加工または処理するための装置内に組み込まれあるいはその中に配置され,あるいは関連して使用するために特に適応された給送,位置決め,または貯蔵装置;切断装置との組合せ (728) | ダイスまたは工具のストロークと関連した被加工物の送り (393) | 被加工物と空気的または磁気的係合手段によるもの (57)
国際特許分類[B21D43/18]に分類される特許
11 - 20 / 57
操作装置を製造する方法ならびに操作装置
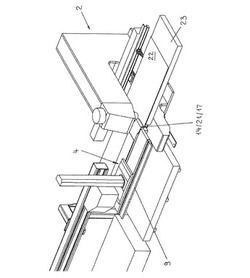
【課題】簡単な手段で、板状の工作物から分離加工された製品を操作するために用いられる操作装置の、その都度の利用目的に適合された構造を実現する。
【解決手段】操作装置4の支持構造9に、アダプタプレート17を備えておらず不完全な適応型の吸着装置14のベースユニット21を備え付け、板状の工作物を、吸着装置13,14によって、操作装置4の支持構造9に取り付け、支持構造9によって、板状の工作物を分離加工するための分離装置2に向かって搬送し、分離装置2において、板状の工作物を分離加工することにより、開口幾何学形状を有する少なくとも1つの開口19を備えた、未だ不完全な適応型の吸着装置14に適合されたアダプタプレート17を製作し、アダプタプレート17を、負圧室20の工作物側で、アダプタプレート17に対応する未だ不完全な適応型の吸着装置14のベースユニット21に取り付ける。
(もっと読む)
ワーク分離装置

【課題】比較的単純な構成のワーク分離装置を提供することである。
【解決手段】ワーク分離装置は、ワーク載置面11を有する昇降台12にして、搬送装置2の搬送面7とワーク載置面11とが同一高さにある第1位置と該第1位置より高位の第2位置との間を往復移動可能に構成された昇降台12と、昇降台12を上方に付勢する第1付勢手段13と、昇降台12が第1位置にあるとき、ワーク載置面11上のワークWを搬送方向Aで位置決めをするワーク位置決め手段14と、プレス加工装置3の上下に移動する上型5に固定的に取付けられている押圧手段15にして、上型5が下降したとき昇降台12を第1位置に押さえつけ、上型5が上昇したとき昇降台12を解放して第2位置までの移動を許容する押圧手段15とを具備する。
(もっと読む)
ワーク搬送装置及び当該ワーク搬送装置を使用した製品搬送システム
【課題】板材加工機の加工テーブル上からスケルトン及び製品を垂直上方に持上げて搬出することのできるワーク搬送装置を提供する。
【解決手段】板材加工機5における加工テーブル7上の加工された製品及びスケルトンを、搬出するためのワーク搬送装置1であって、素材パレット3上からワークWの一枚取りを行うための複数のワーク保持手段17を備えたワーク吊上げフレーム19を、素材パレット3の上方位置と加工テーブル7の上方位置との間をX軸方向に往復動自在かつ上下動自在に備え、加工テーブル7上のスケルトン全体を垂直上方に吊上げるために、スケルトンの互いに反対側の側縁をクランプ自在なスケルトンクランプ25を、ワーク吊上げフレーム19に備えており、複数のワーク保持手段17の配置領域内に、加工テーブル7上の製品を保持自在な製品保持手段21を、X軸に対して直交するY軸方向へ移動自在に備えている。
(もっと読む)
板材搬送システム
【課題】 2台のローダの交互運転等による効率的な搬出を可能としながら、片方のローダの持つ突出した作業具がワークホルダに干渉なく搬出が行えるようにする。
【解決手段】 板材搬送装置2は、独立して走行可能な前後のローダ13,14を有し、前側のローダ13は前方へ突出した作業具58,59を有する。搬送制御装置70は、板材加工機1から板材Wを搬出する基本搬送パターンとして、2台のローダ13,14を交互に用いる。板材Wのうち、ワークホルダ57の近傍でかつ設定寸法以下のものは、基本搬送パターンを解除し、作業具58,59を有しない後ろ側のローダ14で搬送するように制御する。
(もっと読む)
吸着装置及びワーク搬送装置
【課題】吸着パッドを所定の真空度にする時間を短縮することができる吸着装置及びワーク搬送装置を提供する。
【解決手段】本発明のワーク搬送装置1は、搬送対象物であるワークwの表面に配置される吸着パッド21を真空ポンプ22により真空引きしてワークwを把持する吸着装置2と、吸着パッド21を支持するクロスバー31とクロスバー31を移動させる駆動アーム32と駆動アーム32を移動可能に支持する支持部材33とを有する構造部材3と、を備えており、前記吸着装置2は、支持部材33に形成された真空タンク4と、真空タンク4と吸着パッド21との間に配置された第一吸気流路5と、第一吸気流路5に配置された電磁弁6と、真空タンク4と真空ポンプ22との間に配置された第二吸気流路7と、を有する。
(もっと読む)
ワーク搬送装置
【課題】油飛散なく、高速に平行に直線的にワークを搬送することができるワーク搬送装置を提供する。
【解決手段】ワーク搬送装置10は、ロボット11と、ロボット11のアーム13の先端部に取り付けられ、ベルト21によって直線駆動されるキャリア29を有する直動機構20と、キャリア29に取り付けられたワーク把持機構23とを備える。
(もっと読む)
供出装置及びその供出方法
【課題】作業性に優れ、生産性を向上させることができる供出装置を提供すること。
【解決手段】本発明は、複数のブランク材15からなるスタックが載置される第1取出位置11aを備える第1供出部1と、複数のブランク材15からなるスタックが載置される第2取出位置12aを備える第2供出部2と、第1取出位置11a又は第2取出位置12aに載置されるブランク材15の位置を測定するための測定手段3と、第1取出位置11a又は第2取出位置12aからブランク材15をプレスラインに搬入するためのロボットアーム20と、を備える供出装置100である。
(もっと読む)
ツール支持装置及びこれを用いたワーク処理装置
【課題】良好な作動環境を得ることができ、構成が簡略で軽量のツール支持装置及びこれを用いたワーク処理装置を提供することを目的としている。
【解決手段】第一基部11と該第一基部11に対して位置決め可能に直動する直動部12と該直動部12を任意の位置で固定可能な第一固定部13とを有する直動機構10と、直動部12に連結された第二基部と該第二基部に対して位置決め可能に回動する回動部と該回動部を固定可能な第二固定部とを有する回動機構30と、回動部に連結された第三基部と該第三基部に対して位置決め可能に伸縮する伸縮部と該伸縮部を固定可能な第三固定部と前記伸縮部の先端に設けられたツール支持部54とを有する伸縮機構50と、を備えることを特徴とする。
(もっと読む)
ツール支持装置及び及びこれを用いたワーク処理装置
【課題】良好な作動環境を得ることができ、構成が簡略で軽量のツール支持装置及びこれを用いたワーク処理装置を提供する。
【解決手段】シャフト3(3A〜3E)と、該シャフト3(3A〜3E)に対して相対的に回動可能又は回動かつ直動可能に外嵌される可動筒5(5A〜5D)と、シャフト3(3A〜3E)と可動筒5(5A〜5D)との相対移動を固定するブッシュ部材10(10A〜10E)と、を有する可動固定ユニット2(2A〜2E)を複数備え、前記複数の可動固定ユニット2(2A〜2E)は、直列に連結されて、このうちの一方の先端側にツール支持部e1が設けられていることを特徴とする。
(もっと読む)
板材搬送装置
【課題】 走行体をコンパクトにして、板材搬送速度の向上およびその加減速時間の短縮が可能で、小さい板材の搬送効率を向上させることができ、かつ吸着式の板材保持具とグリッパとで使い分けて板材を搬送可能な板材搬送装置を提供する。
【解決手段】 軌道11,12に走行自在に走行体13,14が設けられる。各走行体13,14は、吸着式の板材保持具23A,23B,23Cを支持する板材保持具支持フレーム21,22を有する。板材保持具支持フレーム21,22は、フレーム本体21a,22aと、フレーム本体21a,22aに対して略水平に旋回自在で支持する板材が隣の軌道と平面的に重なる位置まで旋回自在な旋回フレーム21b,22bとを有する。各旋回フレーム21b,22bは板材の端部を把持するグリッパ60を有する。グリッパ60の開口は、板材中央側を向くことが可能である。
(もっと読む)
11 - 20 / 57
[ Back to top ]