
国際特許分類[B22D35/00]の内容
処理操作;運輸 (1,245,546) | 鋳造;粉末冶金 (29,309) | 金属の鋳造;同じ方法または装置による他の物質の鋳造 (13,454) | 溶融金属をベッドまたは鋳型へ運搬する装置 (120)
国際特許分類[B22D35/00]の下位に属する分類
ベッドへのもの (2)
鋳型,例.定盤,湯道,へのもの (13)
加熱または冷却装置 (13)
国際特許分類[B22D35/00]に分類される特許
91 - 92 / 92
小型金属インゴットの鋳造方法および鋳造装置
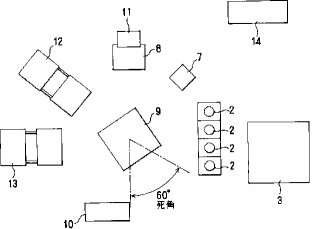
【目的】 ロボットによって溶解・鋳造の工程を自動化できる簡単な構成小型金属インゴットの鋳造方法および装置を提供する。
【構成】 複数の高周波コイル2と、該高周波コイルの中心線の上方に設けられた温度計と、ルツボを高周波コイルの内部に装入・排出するための手段とから成る溶解炉と、鋳型を予熱する第1加熱装置と、鋳込む状態に鋳型を載置するための鋳込台7と、鋳込台の近傍に配置され鋳型内の金属地金を緩やかに冷却するための第2加熱装置と、ルツボを溶解炉に装入するために載置しておくルツボ供給装置12と、離型材付着装置10と、鋳込まれた小型金属インゴットを反転して離型し、載置するための反転台8と、インゴットを収容するストック台13と、ルツボ、鋳型およびインゴットを各装置の間で移送するための多関節ロボット9と、ロボットをシーケンス制御する制御装置を設ける。
(もっと読む)
金インゴット鋳造用ロボットハンドおよび該ロボットハンドで把持するのに適した鋳型

【目的】 複数のロボットハンドを交換する必要がなく、1つのロボットアームに装着して金インゴットの鋳造工程の多数の作業、例えば、ルツボ供給、鋳型供給、鋳込み、離型、インゴットストック等の作業を自動化できる金インゴット鋳造用ロボットハンドを提供する。また、前述の形式の金インゴット鋳造用ロボットハンドで把持するのに適した構造を持つ鋳型を提供する。
【構成】 垂直面内で回転可能なロボット手首に取付けられた金インゴット鋳造用ロボットハンドに、鋳型把手を挟持する鋳型把手挟持手段とルツボを挟持するルツボ挟持手段を有する開閉可能に取付けられた一対の棒状部材から構成された鋳型・ルツボ用ハンドと、インゴットを挟持するインゴット挟持手段を有するインゴット用ハンドとを設ける。また、鋳型を、溶融した金が注入されて鋳込まれる鋳型本体と、鋳型本体の外壁面から垂直に外方に突出するように設けられた断面形状が四辺形である棒状の鋳型把手から構成し、鋳型把手にはロボットハンドの鋳型把手挟持手段の形状に適した形状を設ける。
(もっと読む)
91 - 92 / 92
[ Back to top ]