
国際特許分類[B25B23/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | 締め具,連結具,外し具,保持具のような他に分類されない工具,または卓上器具 (2,830) | スパナ,レンチ,ドライバの細部またはそれらの付属具 (798) | ねじまたはナット取扱い装置 (163)
国際特許分類[B25B23/02]の下位に属する分類
ねじまたはナットの供給装置 (45)
回転前または回転中にねじまたはナットを保持する装置 (100)
国際特許分類[B25B23/02]に分類される特許
1 - 10 / 18
ネジの取付ガイド装置
【課題】操作性がよく、ネジの仮留め、および、仮留め状態のネジからの取り外しを容易にすることができるネジの取付ガイド装置を提供する。
【解決手段】挿通したネジ1を軸方向に直交する方向から支持する溝状孔41と、この溝状孔41の開放側に連なり、ネジ1を溝状孔41から開放側を通過させて受け入れる幅広孔50とで構成した保持部30を、本体20に貫通させることでネジの取付ガイド装置10を構成し、溝状孔41に支持させて壁7に仮留めをしたネジ1を、本体20を軸方向に直交する方向にずらすことで溝状孔41から外して幅広孔50で受け入れさせ、軸方向に通過させると共に本体20をネジ1から取り外す。
(もっと読む)
ナット落下防止装置

【課題】大型ボルトに螺着した大型ナットの着脱作業において、簡易かつ低コストな手段で、大型ナットの落下を防止でき、かつ作業員の安全を確保する。
【解決手段】大型植込みボルト104の下端面104aに設けられたネジ穴104cにセンターガイド棒12の外ネジ16を螺着させる。下側ナット108の取外し時、回転用ハンドル24を操作してナット受け台14を下側ナット108の近くまで上昇させる。次に、回動具装着部110の外周面に工具を装着し、下側ナット108を回動させ下降させる。この移動速度に合わせて、回転用ハンドル24を回し、ナット受け台14を下降させる。下側ナット108が植込みボルト104から外れたら、受け台20まで落下させる。下側ナット108の取付け時には、取外し時と逆の操作を行なう。
(もっと読む)
電動工具
【課題】 先端工具の留め金具からのカムアウトを防止することが可能な電動工具を提供する。
【解決手段】 電子パルスドライバ1は、正転及び逆転可能なモータ3と、前記モータ3から駆動力を供給されて正転方向又は逆転方向に回転するハンマ42と、前記ハンマ42と別体に設けられ前記ハンマ42の前記正転方向への回転により回転力が供給されて回転するアンビル52と、先端工具を保持可能であり前記先端工具に前記アンビル52の回転を伝達する先端工具保持部51と、前記モータ3に回転用正転電力、又は、勘合用逆転電力を供給する電力供給部24と、前記回転用正転電力を供給する前に、前記ハンマ24が前記逆転方向に回転して前記アンビル52を打撃するように前記勘合用尺店電力を前記モータ3に供給するよう前記電力供給部を制御する制御部72とを備えている。
(もっと読む)
ねじ回し工具
【課題】保護カバーを工具シャフトの周りに、相対回動自在に予め取付けることにより、所要の作業を速かに開始することができ、また、ビス、ねじ、バルブコア等の雄ねじ部を有する雄ねじ部材の、所定位置への締付固定、および所定位置からの取り出しに当って、保護カバーによる作業の妨げを十分に防止して、作業能率を大きく向上させることができるねじ回し工具を提供する。
【解決手段】バルブコア3に嵌合されて、バルブコアの、バルブステム4に対する締め込みおよび取り外しを司るものであって、工具シャフト1の周りに、工具シャフトより大きい内径を有する保護カバー9を、工具シャフトに対して相対回動自在に取付け、該保護カバーを、工具シャフトへの取付位置に近接して位置する収縮姿勢と、工具シャフト1先端もしくはその近傍までを覆って位置する伸長姿勢との間で伸縮変形自在とするとともに、常時は前記収縮姿勢に維持可能としてなる。
(もっと読む)
結合部材挿入具
【課題】重ね合わせた第1貫通孔及び第2貫通孔に棒状結合具を挿入して第1部材と第2部材とを結合させる場合に、第1貫通孔及び第2貫通孔への棒状結合部材の挿入を容易且つ安全に行う結合具挿入補助具を提供する。
【解決手段】第1部材11の第1貫通孔12と、第2部材13の第2貫通孔14とを重ね合わせ、重ね合わせた第1貫通孔12及び第2貫通孔14に棒状結合部材10を挿入して第1部材11と第2部材13とを結合させる場合に、第1貫通孔12及び第2貫通孔14に棒状結合部材10を挿入させる結合部材挿入具1であって、第1貫通孔12及び第2貫通孔14を貫通可能な棒状に形成され、棒状結合部材10を挿入可能な中空部22を端部に有する挿入具本体2と、中空部22に差し込み可能に形成される基端部31と、第1貫通孔12及び第2貫通孔14を貫通可能な先細り形状に形成される先端部32と、を有する先細り部材3と、を備える。
(もっと読む)
ナット把持治具
【課題】ロボットの移動動作によってナットの把持を確実に行うことができるナット把持治具を提供すること。
【解決手段】ナット9を載置するための下治具2と、ロボット8のアーム81に接続される上治具3とよりなる。下治具2は、載置台部と、ナット9の外周面の周方向位置を規制するための外周規制部とを有し、外周規制部は、載置台部に対して軸方向に相対移動可能に配設され、規制位置に向けて付勢されている。上治具3は、アームに接続される基部30と、基部30に対して相対移動可能であると共に付勢力に抗して上記縮小位置に向けて移動した場合にナットのねじ込み方向に回転するよう構成された回転部31と、回転部31に固定され、ナット9を収容可能な把持凹部と、把持凹部に収容されたナット9を保持する保持部とを備えた把持ヘッド部35とを有する。
(もっと読む)
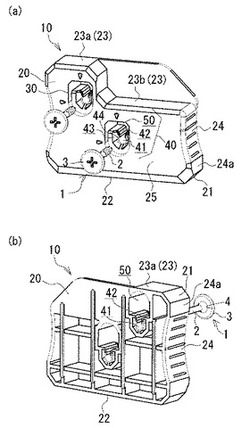
電動締付工具及びねじ分配用ホルダー
【課題】多種・多様のねじを仕分けた状態で本体部の側面に吸着させることができる電動締付工具を提供する。
【解決手段】ビット11を回転させるモーターを内蔵した本体部10と、この本体部10の底部から下方へ突出したグリップ部20と、を備えた電動締付工具1であって、本体部10の側面に取り外し可能なアタッチメント30を備え、このアタッチメント30の表面に、複数の磁石31を互いに離間して設け、磁石31のそれぞれに各種のねじを種類毎に区分して吸着する。
(もっと読む)
自動ネジ締め装置用治具
【課題】共回りを防止するためにワーク1に設けられているトルク伝達部分3(例えば六角柱形状)を、これと嵌合するソケット12に回転方向の位相を合わせてロボットで容易に嵌合することができ、これにより、ワークのネジ部2に螺合したナット4を締め付ける際に、トルク伝達部分3の共回りを容易かつ確実に防止することができる自動ネジ締め装置用治具を提供する。
【解決手段】ワーク1のトルク伝達部分3と嵌合してトルク伝達部分の回転を停止させる嵌合穴13を有するソケット12と、ソケットを嵌合穴の軸心まわりの回転を阻止しながら軸心に沿って移動可能に案内するリニアガイド14と、ソケットをトルク伝達部分に向けて付勢する付勢装置16とを備える。ワークは、ロボットによりトルク伝達部分3をソケットの嵌合穴13に向けて同心に移動され、かつトルク伝達部分3がソケット12と当接した状態で、ロボットにより雄ネジ部分に螺合したナット4を所定のトルクで回転駆動される。
(もっと読む)
ボルト締め付け装置
【課題】ネジ面の摩擦係数そのものを変更することなく、ボルトを締め付ける際にもたらされるボルト軸力の高軸力化を図ることが可能なボルト締め付け装置を提供すること。
【解決手段】本発明のボルト締め付け装置は、回転トルクをボルト頭部に伝達すると共に、ボルト頭部に伝達された回転トルクにより雄ネジ部が回転される際にボルト座面に平行な横荷重をボルト頭部に付与する横荷重付与手段を具備し、該横荷重付与手段は、円形状の貫通穴部であって該貫通穴部の壁部に内歯を有する貫通穴部を備える本体部と、該貫通穴部内に配設され且つ外歯を有する第1歯車であって自身が回転すると貫通穴部の内歯に沿って移動するように貫通穴部内に構成配置された円形状の第1歯車と、該第1歯車が貫通穴部から脱落しないようにする脱落防止手段と、本体部のボルト座面に対する相対的な動きを阻止する反力受け手段とを有する。
(もっと読む)
ボルト挿入治具
【課題】簡単な構造のボルト挿入治具によって、ボルト締付対象物の複数のボルト締付穴に対し、ボルトを確実に一括挿入することを可能とする。
【解決手段】ボルト保持手段26のボルトガイド30が、複数の弾性棒状部材34を環状に並べられて構成されている。複数の弾性棒状部材34によって囲まれた空間に、その基端部からボルト18を受け入れ、弾性棒状部材34がボルト18の周囲に接触することにより、ボルト18を所定の姿勢に維持し、ボルト18が不用意に脱落することを防ぐことができる。又、ボルト押出手段28のピン44をボルトガイド30に挿入し、ピン44によりボルト18に押圧を加えることで、複数の弾性棒状部材34の弾性変形を促し、ボルトガイド30の先端部から、ボルト18を繰出すことが可能となる。
(もっと読む)
1 - 10 / 18
[ Back to top ]