
国際特許分類[B25J18/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 腕 (66) | 伸縮できるもの (21)
国際特許分類[B25J18/02]の下位に属する分類
伸縮とともに回転できるもの (1)
国際特許分類[B25J18/02]に分類される特許
1 - 10 / 20
多段伸縮装置
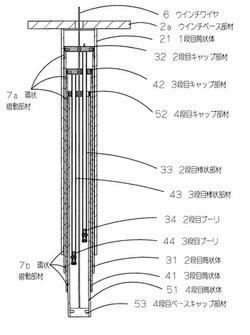
【課題】多段伸縮装置において、各段の外形寸法差を小さくして装置の小型化・装置筒状体の意匠自由度の向上・装置の剛性を向上、さらには装置内部にある部品の組立保守性を改善した多段伸縮装置を提供すること。
【解決手段】最外段筒状体、中間段筒状体、最内段筒状体とからなり、最外段筒状体内から順次次段の筒状体が出没可能になされた多段伸縮装置において、中間段筒状体を牽引するワイヤが巻回され、前記中間段筒状体と一体として移動可能になされたプーリが、最内段筒状体内部に配設されるようにした。
(もっと読む)
基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法

【課題】位置決めの再現性、制御応答性及びサーボ剛性を向上できる基板搬送装置を実現する。
【解決手段】基板搬送装置は、基板を保持することが可能な基板保持器と、前記基板保持器を進退動作させるリンク部と、前記リンク部を動作させる駆動力を発生する駆動部と、前記基板保持器及び前記リンク部のいずれか一方に設けられたガイドバーと、前記基板保持器及び前記リンク部のいずれか他方に設けられ、前記リンク部の動作により前記基板保持器が移動する際に前記ガイドバーをスライド可能に支持する支持部と、を有する。
(もっと読む)
ロボット
【課題】電動モータの駆動力の増大を抑制した態様にて、ロボットの伸縮動作を確保すること。
【解決手段】フレーム間の相互変位に応じて伸縮可能に構成されたロボット100であって、ロボット100の基端側から先端側へ順に配置されるべきフレーム14、13、15と、電動モータ1から供給される駆動力に基づいてフレーム13を先端側へ駆動する駆動手段と、駆動手段と協調してフレーム13を先端側へ付勢する付勢手段と、駆動手段及び付勢手段によるフレーム13の先端側への搬送に同調して、前記フレーム13からみてフレーム14、15を互いに逆方向へ搬送する搬送機構と、を備える。例えば、付勢手段は、ガススプリングから構成される。
(もっと読む)
多段構造のアクチュエータ
【課題】長尺の案内レールを使用することなく被駆動体をロングストロークにわたって搬送可能とする。
【解決手段】この多段構造のアクチュエータ1は、複数の駆動ユニット10A〜10Dそれぞれが、二つのボールねじ11A,11Bを有している。二つのボールねじ11A,11Bは、相互のナット5,5が逆方向に駆動され、また、隣り合う駆動ユニット10A〜10Dのナット5,5相互が連結されている。さらに、各駆動ユニット10A〜10Dには、案内レール2が取り付けられ、これを支持する複数の案内部材3は、各駆動ユニット10A〜10D毎に軸方向に離間してベースBに配置されている。そして、各案内レール2は、各駆動ユニット10A〜10Dの移動に伴って、複数の案内部材3に順次に受け渡されるようになっている。
(もっと読む)
基板搬送装置
【課題】装置の近傍に基板を搬送したときに、基板の下方にスライダベースが存在しないようにすることができる基板搬送装置を提供することを課題とする。
【解決手段】基板搬送装置1であって、本体部10に支持された第一スライダベース20と、第一スライダベース20の第一ガイドレール22に沿って移動自在な第二スライダベース30と、第二スライダベース30の第二ガイドレール32に沿って移動自在なハンド部材40と、第二スライダベース30に連動してハンド部材40を移動させる連動機構50とを備え、連動機構50は、第二スライダベース20に連動して回転する第一連動ギヤ51と、第一連動ギヤ51に対してギヤ比が小さい第二連動ギヤ53とを備え、第二スライダベース20に第一連動ギヤ51及び第二連動ギヤ53が取り付けられ、第一連動ギヤ51に連動する第二連動ギヤ53によってハンド部材40が送り出される。
(もっと読む)
伸縮アーム
【課題】 プーリとベルトとを用いることなく、安定した動作を行うことが可能な伸縮アームを提供する。
【解決手段】 第1腕要素(20)が、第1回転中心(10)を中心として回転可能であり、第2回転中心(11)を画定する。第2腕要素(60)が、第2回転中心を中心として回転可能であり、第3回転中心(12)を画定する。第1平行リンク機構(21)で画定される相互に平行な一対の辺の一方が第1回転中心を中心として回転可能であり、他方が第2回転中心を中心として回転可能である。第2平行リンク機構(61)が画定する相互に平行な一対の辺の一方が第2回転中心を中心として回転可能であり、他方が第3回転中心を中心として回転可能である。間接機構(40)が、第1平行リンク機構の、第1回転中心を通過するリンクの姿勢を固定した状態で、第1腕要素が第1角度だけ回転したとき、第2腕要素を第1腕要素に対して、第1腕要素とは反対向きに、第1角度の2倍の角度だけ回転させる。
(もっと読む)
マニピュレータ機構
【課題】十分な強度の付与と軽量化を両立させることが出来、然も過大な外力の作用によってアームが折れ曲がったときにも復旧が可能な伸縮式のマニピュレータ機構を提供する。
【解決手段】本発明に係るマニピュレータ機構は、先端部に先端機構3を具えたアーム1と、該アーム1の基端部が連結されて該アーム1の巻き取り及び繰り出しを行なうアーム繰り出し装置2とを具え、アーム1は、弾性を有する複数本のテープ41を束ねてなるテープ集合体4と、該テープ集合体4の長手方向に間隔をおいてテープ集合体4に装着された複数の拘束部材5とを具え、該拘束部材5には、前記複数本のテープ41が貫通して該複数本のテープ41の相対位置を一定に保つためのガイド溝51が開設されている。
(もっと読む)
出入装置
【課題】可動フレームの撓みを防止することができるようにした出入装置を提供すること。
【解決手段】上下に摺動可能にして重ねる3枚の可動フレーム2、3、4間に、それぞれレール51及びブロック52とよりなる直動ベアリング5を介在して、各段の可動フレームが出入りするようにするとともに、下方側の可動フレーム端部に可動フレーム支持ローラ8を配設する。
(もっと読む)
直線移動機構およびこれを用いた搬送ロボット
【課題】 正確な直線移動行程を実現しつつ、構造の簡略化を図ることができる直線移動機構、およびこれを用いた搬送ロボット、さらには真空環境下での使用に適した当該搬送ロボットを提供する。
【解決手段】 本発明に係る直線移動機構B1は、ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程GLに沿って移動可能な2つの移動部材と、駆動プーリ31b、およびこの駆動プーリ31bに掛け回されて移動行程GLの平行線に沿う所定の往復動区間3Aa,3Bbを往復動する出力ベルト33を含んで構成された駆動機構3A,3Bと、駆動プーリ31bを駆動するためのモータM3,M4とを備え、移動部材は、連結部材24a,24bによって駆動機構3A,3Bの出力ベルト33にそれぞれ連結されており、駆動機構3A,3BおよびモータM3,M4は、それぞれガイド部材1に支持されている。
(もっと読む)
基板搬送装置
【課題】 半導体や液晶パネルの製造工程における基板搬送を簡易な構造で、迅速かつ高精度で行えるようにする。
【解決手段】 第1スライダ20と第2スライダ30とが同期をとって伸長するリニアスライダ10が収容される際、第1スライダ10はベースハウジング11内に完全に収容され、第2スライダ30は収容状態の第1スライダ20上まで縮退する。一方、第1スライダ10は、ベースハウジング11内に設けられた1対のプーリ間に掛け渡されたベルトBの一部に固定された保持プレート22によって、ベルトBの走行方向に移動して伸縮するとともに、第2スライダ30は、両端部がベースハウジング11内の保持プレート22に軸支された1対の従動プーリ23,24ととの間に掛け渡されたワイヤ18の一部に固定された部位を介して第1スライダ20の伸縮と同期してスライドする。
(もっと読む)
1 - 10 / 20
[ Back to top ]