
国際特許分類[B60G17/016]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両懸架装置 (7,837) | 車両または走行路面の状態の変化,例.速度または荷重による,に合わせて,ばねまたは振動緩衝器の特性を調節したり,車両の支持面と振動部との間隔を調整したり,または使用中の懸架装置をロックしたりする手段をもつ弾性的懸架装置 (3,807) | 電気または電子要素からなる調整手段 (2,855) | 車両が走行している場合の,特定の動作,特定の状況,または運転者の入力に対する調整手段の反応に特徴のあるもの (608)
国際特許分類[B60G17/016]の下位に属する分類
外的条件に対するもの,例.未舗装の路面,横風 (105)
国際特許分類[B60G17/016]に分類される特許
1 - 10 / 503
減衰力調整式シリンダ装置
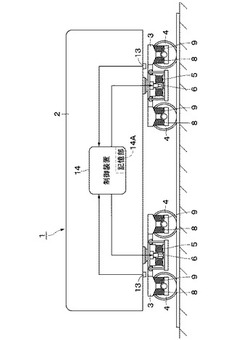
【課題】 異常を検出するときの誤検出を減らすことができる減衰力調整式シリンダ装置を提供する。
【解決手段】 減衰力可変ダンパ6は、台車3と車体2との間に連結される。減衰力可変ダンパ6には、減衰力特性を調整するアクチュエータ7が搭載されると共に、減衰力可変ダンパ6から車体2に作用する力を検出する力センサ12が内蔵されている。加速度センサ13は、車体2に設けられ、上,下方向の車体加速度を検出する。制御装置14は、正常状態と判定したときは、力センサ12と加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。一方、制御装置14は、センサ故障状態と判定したときは、力センサ12からの検出信号を用いずに、加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。
(もっと読む)
インホイールモータ車両用サスペンションシステム

【課題】 インホイールモータ車両に特有の振動を解消したインホイールモータ車両用サスペンションシステムを提供する。
【解決手段】 インホイールモータ装置1と車体2との間に介在したサスペンション3に、弾性支持機構10およびショックアブソーバ11を有する。弾性支持機構10は弾性係数の変更が可能であり、ショックアブソーバ11は減衰力の変更が可能である。モータ7の回転速度が、定められた共振周波数範囲に入るか否かを監視する共振監視手段21を設ける。共振周波数範囲にモータ7の回転数が入ると判定された場合に、弾性支持機構10に弾性係数を変更させる弾性係数制御手段22、およびショックアブソーバ11の減衰力を変更させる減衰力制御手段23を設ける。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
車両用制御装置
【課題】車両の安定性を確保しつつ操舵感を向上できる車両用制御装置を提供すること。
【解決手段】車両1の状態量が所定の第1条件を満たす場合に、後輪2RL,2RRのキャンバ角が調整されて後輪2FL,2FRにネガティブキャンバが付与される。また、車両1の状態量が第1条件と異なる第2条件を満たす場合には、後輪2FL,2FRにネガティブキャンバが付与され、車両1のステア特性がアンダーステア傾向にされる。さらに、第2条件を満たす場合には、第1条件を満たす場合より前輪2FL,2FRの等価コーナリングフォースが大きくされ、操安キャパシティが向上される。操安キャパシティが高いほど車両1の収束性が高いといえるので、第2条件を満たす場合には、車両1の安定性を確保しつつ操舵感を向上できる。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
サスペンション制御装置及びサスペンション制御方法
【課題】ストローク速度が微低速域であっても車両姿勢をより精度良く制御可能とする。
【解決手段】車両の上屋挙動の検出値に基づき第1目標制御量A1を算出すると共に、車両の制駆動力から推定した上屋挙動に基づき第2目標制御量A2を算出する。その算出した第1目標制御量A1及び第2目標制御量算出手段に基づき最終目標制御量Aを算出する際に、上屋挙動が小さい場合、該上屋挙動が大きい場合に比べて第2目標制御量A2を優先して最終目標制御量Aを算出する。そして、その最終目標制御量Aに基づいて、サスペンションのストロークを制御可能なアクチュエータ15を駆動制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
車両
【課題】乗員の動揺に関する乗り心地を向上させることができるようにする。
【解決手段】一対のサイドサポート部22によって、シート20に着座している乗員の左右方向の動きを抑制するように乗員の胴体部を拘束する。車両のサスペンションのサスペンション特性により、車室部のロール方向の共振周波数が、乗員の頭部の左右方向の共振周波数帯域の下限以下に設定されている。これによって、乗員の胴体部の左右方向の動きを抑制すると共に、頭部の左右方向の揺れを抑制するため、乗員の動揺に関する乗り心地を向上させる。
(もっと読む)
キャンバ制御装置
【課題】燃費を十分に良くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪にキャンバを付与するためのキャンバ可変機構と、車両に振動が発生しているかどうかを判断する振動発生判断処理手段と、車両に振動が発生していると判断された場合に、所定の車輪にキャンバを付与するキャンバ付与処理手段とを有する。車両に振動が発生していると判断された場合に、所定の車輪の各タイヤに、互いに対向する方向にキャンバスラストが発生させられるので、車両を十分に安定させて走行させることができる。燃費を十分に良くすることができる。
(もっと読む)
1 - 10 / 503
[ Back to top ]