
国際特許分類[B60G17/0165]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両懸架装置 (7,837) | 車両または走行路面の状態の変化,例.速度または荷重による,に合わせて,ばねまたは振動緩衝器の特性を調節したり,車両の支持面と振動部との間隔を調整したり,または使用中の懸架装置をロックしたりする手段をもつ弾性的懸架装置 (3,807) | 電気または電子要素からなる調整手段 (2,855) | 車両が走行している場合の,特定の動作,特定の状況,または運転者の入力に対する調整手段の反応に特徴のあるもの (608) | 外的条件に対するもの,例.未舗装の路面,横風 (105)
国際特許分類[B60G17/0165]に分類される特許
1 - 10 / 105
車両
【課題】 横風に強い車両を提供することを課題とする。
【解決手段】 第1発明の車両は、横風の発生を予知し、その予知された横風に基づいて、例えば、電子制御ユニットは、支持装置30を、あらかじめ作動させて横風に対処するように制御する。そのため、第1発明の車両は、横風に強い車両となる。また、第2発明の車両は、車体の左側を流れる気流と車体の右側を流れる気流との少なくとも一方を変化させることで、車体の左右を流れる気流の間に圧力差を発生させたり、車体の横風の風下側を流れる気流を車体に当てることで、横風に対抗する力を車体に作用させる。そのため、第2発明の車両は、横風に強い車両となる。
(もっと読む)
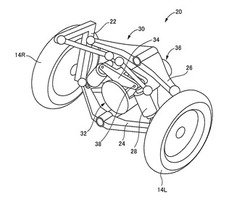
車両運動制御システム

【課題】車輪特殊配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】左右輪14の各々に対応して設けられた距離変更装置を制御してそれらの各々の動作量に差を設けることで車体を傾斜させる場合に、(i)実現させるべき車体の傾斜の程度に基づいて目標動作量差ΔLを決定し、(ii)増加させる方の距離変更装置の動作量ΔLUPと減少させる方の距離変更装置の動作量ΔLDWとへの目標動作量差ΔLの配分を決定し、(iii)その配分に基づいて2つの距離変更装置の各々の目標動作量を決定する。そのことにより、車体を傾斜させる際の車体の重心位置,左右輪と前後輪との荷重配分等を変更することが可能である。
(もっと読む)
車両用制御装置
【課題】車両が周期的な路面を走行中に、車輪が路面の凸部を一段飛ばしで走行しているかを判断し、ショックアブソーバの減衰力を適正値に変更し、車両が路面から受ける荷重を低減する車両用制御装置を提供すること。
【解決手段】路面が左右の車輪で同位相の周期的な凹部と凸部とを含む形状であるかを判断する左右輪路面形状判定装置と、左右の車輪が路面の凸部を一段飛ばしで走行しているかを判断する走行状態判定装置と、ショックアブソーバの減衰力の適正値を演算する演算装置とを有し、左右輪路面形状判定装置が路面の形状が左右の車輪で同位相の周期的な凹部と凸部とを含む形状であると判断し、走行状態判定装置が路面の凸部を一段飛ばしで走行していると判断するときに、演算装置が演算する適正値にショックアブソーバの減衰力を変更する。
(もっと読む)
キャンバ制御装置
【課題】スプリット路上で車両を走行させたり、発進させたりする際に、車輪に付与されたキャンバによって車両の状態が不安定になることがないようにする。
【解決手段】車両のボディと、ボディに対して回転自在に配設された複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両がスプリット路上にあるかどうかを判断するスプリット路判断処理手段と、スプリット路判断処理手段によって車両がスプリット路上にあると判断された場合に、キャンバ可変動作を変更するキャンバ可変動作変更処理手段とを有する。車両がスプリット路上にあると判断された場合に、車輪がキャンバが付与されている状態に保持されるか、キャンバが付与されていない状態に保持されるか、又はキャンバの付与動作若しくは解除動作が遅延させられるので、車両の状態が不安定になることがない。
(もっと読む)
車両用エアサスペンション制御装置
【課題】車両の前輪が接地する路面の高さが左右で異なっていても、車両の左右一方の前輪が浮き上がったりすることを防止しつつ、クラウチング制御を確実に行うことができ、且つ圧縮エアの消費を抑制し得る車両用エアサスペンション制御装置を提供する。
【解決手段】クラウチング制御並びに車高調整制御が行われていないステップS1の通常モード中に、ステップS2において車両がうねり路にいるか否かを判断し、該車両がうねり路にいる場合には、ステップS3において車両後部における左右それぞれのレベリング制御を強制的に休止させるようにする。
(もっと読む)
スタビライザ装置
【課題】 消費動力を低減することができ、アクチュエータの小型化が可能なスタビライザ装置を提供する。
【解決手段】 コントローラ20は、操舵角センサ21で検出した操舵角と車速センサ22で検出した車速とに基づいて、走行車両に働く横加速度を推定演算して予測する。予測された横加速度に基づきFF制御にてモータ目標位置Stを演算する。モータ位置センサ23により検出した電動モータ19の現在位置Siとモータ目標位置Stとの偏差ΔSが不感帯の閾値eの範囲内となるように、電動モータ19の回転位置を制御する。これにより、コントローラ20は、車体が次の挙動を開始する前に可変剛性部4を目標剛性にする制御を開始する目標剛性制御手段を実現するものである。
(もっと読む)
横転警報装置、車両、および横転警報方法、並びにプログラム
【課題】簡単な処理により、運転開始に先立って、運転者が車両の横転し易さを直接的に把握すること。
【解決手段】車両のロール角度を所定のサンプリング周期毎に記憶するロール角度記憶部23と、エアベローズ内の空気圧の変化に応じ、荷台への貨物の積載開始を判定し、荷台への貨物の積載開始を判定したときからの空気圧の変化に応じ、荷台への貨物の積載完了を判定し、積載完了と判定した時刻とその所定期間前の時刻との間にロール角度記憶部23に記憶されたロール角度のサンプリング値の平均値から積載開始と判定した時刻とその所定期間前の時刻との間にロール角度記憶部23に記憶されたロール角度のサンプリング値の平均値を減算してロール角度を取得するロール角度検出部21と、ロール角度を横転の危険性を示す指標として表示画面24に表示する表示制御部22と、を有する横転警報装置20を構成する。
(もっと読む)
サスペンション装置
【課題】インパクトショックのばね上部材への伝達を効果的に低減することができ、かつ、経済的なサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両におけるばね上部材とばね下部材との間に介装されてばね上部材とばね下部材との相対移動を抑制する減衰力を発揮する緩衝器2と、当該緩衝器2における減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、上記緩衝器2の収縮速度が所定の速度閾値α以上となるとともに、収縮速度の変化量が所定の速度変化量閾値β以上となると、当該緩衝器2の収縮側減衰力を最小とすることを特徴とする。
(もっと読む)
移動機構
【課題】路面凹凸からの外乱を吸収し、傾斜路面であっても車体フレームを水平に保ち安定に走行する移動機構を構成する。
【解決手段】車体フレームに車輪を接続し移動する移動機構において、それぞれの車輪をスイングアームで車体に取り付け、それぞれのスイングアームを支えるコイルバネを懸架するピッチ・ロール方向に回動可能なテーブルの傾きを適切に制御することによって、車体フレームを水平に保ち安定に走行する移動機構を構成する。
(もっと読む)
サスペンション制御装置
【課題】 ばね上の振幅の大きさに応じて利得を調整して、フワフワ感とヒョコヒョコ感の抑制を両立させる。
【解決手段】 ばね上加速度センサ7と積分器10によって、ばね上速度ynを検出する。スケジューリングパラメータ演算器13は、ばね上速度ynの大きさに基づいてスケジューリングパラメータpを算出する。ゲインスケジュールドH∞制御器16は、ばね上速度ynとスケジューリングパラメータpとに基づいて、目標減衰力urの利得を調整する。これにより、フワフワ感とヒョコヒョコ感の抑制を両立させることができる。
(もっと読む)
1 - 10 / 105
[ Back to top ]