
国際特許分類[B60T8/172]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用される制御パラメータを決定するもの,例.測定または検知されたパラメータに関する計算によるもの (401)
国際特許分類[B60T8/172]に分類される特許
101 - 110 / 401
車両制御装置
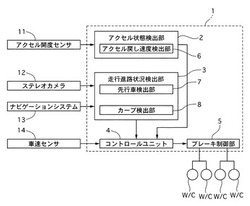
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少が検出され、かつ、カーブ検出部8により走行進路にカーブが検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
ブレーキ装置の制御方法および装置

【課題】電気操作式ブレーキ装置の適切な制御により運転の容易性および乗り心地を改善する。
【解決手段】車輪ブレーキの電気操作式設定要素がブレーキペダルの操作から測定されたドライバのブレーキ希望の関数として制御され、ブレーキ信号の少なくとも1つの操作量が測定され、この操作量からドライバのブレーキ希望が導かれるブレーキ装置の制御方法において、少なくとも1つの操作量からドライバのブレーキ希望を導くとき、操作量の変化方向が考慮され、ブレーキ希望が操作量およびヒステリシス部分値から形成され操作量の変化方向が反転したとき、ヒステリシス部分値が、操作量との間で単調関数となるように変化し、前記単調関数が所定の勾配を有する直線である。
(もっと読む)
車両停止判定装置
【課題】車両の停止を確実に判定することができる車両停止判定装置を提供する。
【解決手段】車両停止判定装置1では、ECU2において、制動する車両10の停止が判定されると共に、車両10の車速がABS制御装置5の作動する下限速度以下となった後でタイマ時間が経過するまでの間、かかる車両10の停止の判定が禁止される。これにより、車両停止判定装置1では、車輪のロックを車両10の停止と誤判定するのを抑制することが可能となる。
(もっと読む)
路面状態推定方法とその装置、及び、車両制御方法
【課題】タイヤにセンサーを取付けることなく、走行中の路面状態を精度よく推定することのできる方法とその装置を提供する。
【解決手段】ナックル31に設けられて車両バネ下部に伝播されるタイヤ20の振動を検出する加速度センサー11と、タイヤ20の回転速度を検出する車輪速センサー12と、この車輪速センサー12の出力から生成されたサンプリングパルスを用いて、タイヤ20の振動波形を回転次数分析して回転次数スペクトルを求める回転次数比分析手段15と、回転次数スペクトルから複数個の回転次数成分を抽出する回転次数成分抽出手段17と、回転次数成分の大きさと予め設定された閾値とを比較して走行中の路面Rが低μ路面か否かを推定する路面状態推定手段18とを備え、タイヤ周方向に沿って周期的なトレッドパターンを有するタイヤの振動から、走行中の路面Rの状態を推定する。
(もっと読む)
制動補助装置
【課題】 液圧式の制動装置におけるドライバの制動操作を加圧手段による加圧により補助する制動補助装置において、加圧時にもドライバによるペダル操作量を精度よく検出することを可能とした制動補助装置を提供する。
【解決手段】 加圧手段による加圧によって生じるストローク変化量ΔSを推定し、この推定値に基づいてドライバの制動操作で行われたあるべきストローク量Soutを算出する。好ましくは、ドライバのブレーキペダルの踏み増し操作の有無に応じてこの算出手法を異ならせることで、あるべきストローク量を精度よく算出することができ、この結果、ストローク量に基づいた制動力制御の精度も向上する。
(もっと読む)
車両用勾配推定装置および車両用走行制御装置
【課題】走行路の路面勾配の推定精度を向上させ、路面勾配の推定結果に応じて適切な走行制御を行なう。
【解決手段】車両用勾配推定装置10aは、車速を検出する車速センサ21と、車速センサ21により検出された車速に基づいて車両の車体加速度を算出する車体加速度算出部31と、エンジン負荷減速度およびクリープトルクによる加速度などからなる加速度補正量を算出する加速度補正量算出部32と、車体加速度を加速度補正量により補正する加速度補正部33と、ブレーキ液圧を検出するブレーキ液圧センサ23と、車速が車両のほぼ停止状態を示す所定値以下となった場合に、加速度補正部33により算出された加速度(つまり、ブレーキの作動に起因した減速度)とブレーキ液圧との比に基づいて走行路の勾配を推定する第1勾配推定部36とを備えて構成される。
(もっと読む)
路面勾配判定方法及び車載内燃機関の制御装置
【課題】運転者によるブレーキ踏み込み量を反映する値であるブレーキマスタ圧と車輪速度の減速度とを用いた路面勾配の判定精度を向上させることのできる路面勾配判定方法、及び該路面勾配判定方法を用いて内燃機関の運転を制御する車載内燃機関の制御装置を提供する。
【解決手段】
ブレーキフルードの加圧度合いとしてのブレーキマスタ圧と、ブレーキペダルの踏み込みにより減速される車両の車輪速度の変化度合いに基づき算出される減速度とを用いて走行路面の勾配を判定する。このブレーキマスタ圧として該ブレーキマスタ圧の変化が検出されてから「500ms」後に検出されるブレーキマスタ圧を用い、減速度としてこの「500ms」後にブレーキマスタ圧が検出されたときに検出される車輪速度とこの車輪速度の検出から更に「500ms」後に検出される車輪速度とから算出される減速度を用いて、走行路面が平坦路及び坂路のいずれであるかを判定する。
(もっと読む)
路面摩擦係数推定装置
【課題】車両の所定のヨー軸周りのモーメントの推定値を用いて路面の摩擦係数の推定を行う場合に、路面の摩擦係数の推定値の信頼性や安定性をさらに向上させる。
【解決手段】車両1のヨー軸周りの外力モーメントの第1推定値Mz_estm_kを求める手段(S102〜S116,S118−4)と、第2推定値Mz_sens_kを求める手段(S118−3)と、偏差(Mz_sens_k−Mz_estm_k)を“0”に収束させるように路面摩擦係数の推定値の増減操作量Δμ_kを決定する手段(S118−6)とから成る基本処理手段31_kを複数備え、Δμ_kに応じて路面摩擦係数の推定値を更新する。基本処理手段31_kのそれぞれに対応するヨー軸は互いに異なる位置に設定される。
(もっと読む)
摩擦円推定装置
【課題】 摩擦円の推定精度を高くすることができる摩擦円推定装置を提供すること。
【解決手段】 タイヤから車体に伝達する振動伝達特性が減衰特性となる周波数を有する同定トルクを車輪に付与するようにした。
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値Fsubx_i_estm,Fsuby_i_estmを求めると共に横滑り運動状態量モデル値Vgy_predictを求める手段と、路面反力モデル値の合力によって車両の所定の位置(重心点の位置)に発生する横加速度モデル値Accy_estmと実横加速度検出手段15,22fの出力が示す横加速度検出値Accy_sensとの偏差Accy_errを求める手段と、偏差Accy_errをハイカット特性のフィルタ24d1に通した値を横滑り運動状態量モデル値に加えてなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
101 - 110 / 401
[ Back to top ]