
国際特許分類[B60T8/172]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用される制御パラメータを決定するもの,例.測定または検知されたパラメータに関する計算によるもの (401)
国際特許分類[B60T8/172]に分類される特許
71 - 80 / 401
車両用路面勾配検出装置及びエンジンの制御装置
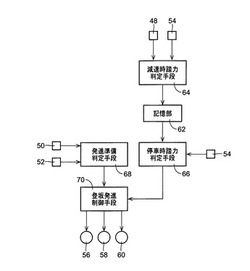
【課題】特別な構成を設けることなく路面勾配の検出を行う車両用路面勾配検出装置を提供する。
【解決手段】予め定められた関係から、車両停止中のブレーキ踏力FBに基づいて、そのブレーキ踏力FBが大きいほどその車両が走行する路面の勾配が大きいことを検出することを特徴とするものであることから、ブレーキ踏力FBに対応するブレーキ油圧を検出するブレーキ用油圧センサ54等の既存の構成を利用することで、特別な構成を設けることなく路面勾配の検出を行う車両用路面勾配検出装置を提供することができる。
(もっと読む)
路面状態判定装置及び車両の制御方法

【課題】路面状態を好適に判定可能にする。
【解決手段】路面状態判定装置33が、駆動輪3の空転の程度を表すスリップ値Sを測定するスリップ値測定手段41と、スリップ値測定手段41により測定されたスリップ値Sの変化率ΔSを演算する変化率演算手段42と、変化率演算手段42により演算されたスリップ値の変化率ΔSに応じて路面状態rを判定する判定手段43と、を備える。
(もっと読む)
車両運動制御装置
【課題】加速旋回を含んだ走行状態にある車両の加速性を維持しつつ、車両を安定して走行させることが可能な車両運動制御装置の提供。
【解決手段】車両Mの駆動輪Wfl,Wfrの空転量が所定の閾値よりも大きい場合、ブレーキ制御ECU26は通常の空転抑制制御を実行し、空転傾向にある駆動輪Wfl,Wfrに制動力を付与する。車両Mの加速旋回状態が検出され、かつ、アンダステア状態が検出された場合、旋回内側の駆動輪Wfl,Wfrの空転量の閾値を通常の空転抑制制御時の閾値よりも大きくし、旋回内側の駆動輪Wfl,Wfrへの制動力の付与を抑制し、その空転を許容する。また、車両Mの加速旋回状態が検出され、かつ、アンダステア状態が検出された場合、旋回外側の駆動輪Wfl,Wfrの空転量の閾値を通常の空転抑制制御時の閾値よりも小さくし、外側の駆動輪Wfl,Wfrへの制動力の付与を増大させる。
(もっと読む)
車両の軌道の決定方法
【課題】ブレーキ過程において制動距離を短縮するための方法および装置、または加速過程においてトラクションを改善するための方法および装置を提供する。
【解決手段】車両(1)の軌道(5、6、7)の決定方法において、操縦の際に、種々の走行路領域の摩擦係数情報が決定され、障害物に関して周辺検出が実行され、摩擦係数情報に基づき且つ周辺検出の結果を考慮して、少なくとも1つの軌道(5、6、7)が決定される。これにより、制動距離の短縮または改善されたトラクション(牽引)が達成可能である。
(もっと読む)
走行する車両における横揺れ角を評価する方法
本発明は、次の段階により走行する車両(7)の横揺れ角を評価する方法に関する。段階a)において、カメラ(8)により車両周辺特に前にある車道(1)の画像列を記録する。カメラ画像から、車道表面の少なくとも1つの記号(S1〜S6)を抽出従って求めて追跡する。1つ又は複数の後続のカメラ画像における少なくとも1つの記号(S1〜S6)の変化する位置から、段階c)において、どの横揺れ方向にカメラ(8)が回転されているかを確かめる。段階d)において横揺れ角の値を評価する。このため車両速度(v)及びカメラ(8)の写像モデルを考慮して、段階d1)において、横揺れ角の値を直接評価するか、又は評価される段階d2)において、横揺れ角がカメラ(8)の回転を十分補償するまで、反復して所定の修正角だけ横揺れ角を増大するか又は減少する。これから評価される横揺れ角が全修正値として生じる。 (もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
車両運動制御装置
【課題】横転抑制制御を行う必要がないときにまで横転抑制制御が行われてしまうことを防止する。
【解決手段】横転抑制制御の開始条件(Gy>Gs)が満たされることによって一旦横転抑制制御が開始されたとしても、横転抑制制御開始から待ち時間T1が経過した時点で横転抑制制御を継続するべきか中断すべきかを判定する。そして、横転抑制制御を中断すべきと判定されたときに、横転抑制制御の開始条件を満たしていてもそれを継続しないようにする。これにより、本来横転に至らない状況まで横転抑制制御が継続されてしまうことを抑制することができる。
(もっと読む)
推定加速度演算装置
【課題】路面状態や車両の旋回状態による誤差を抑制し、精度良く推定Gを演算することができる推定G演算装置を提供する。
【解決手段】悪路レベルや車両の旋回状態に応じて転がり抵抗係数fを補正し、運動方程式に用いられる転がり抵抗係数frとして補正後転がり抵抗係数fを用いて推定G演算を行う。これにより、悪路レベルや車両の旋回状態に応じて正確な補正後転がり抵抗係数frに基づいて推定G演算を行うことが可能となり、車両の旋回状態を加味して精度良く推定Gを演算することができる。
(もっと読む)
車両制御装置および車両制御方法
【課題】走行実績のある走行情報を使用して、安全な運転計画を生成することが可能な車両制御装置および車両制御方法を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車の走行実績のある走行情報(前後Gx、横Gy、および位置情報等を含む)を入力し、走行実績のある前後Gxおよび横Gyに基づいて、運転計画の対象となる道路の路面μを推定し、推定した路面μに基づいてタイヤ発生力を算出し、算出したタイヤ発生力を超えない条件で運転計画を生成する。
(もっと読む)
車両制動装置
【課題】 制動距離を抑制することができる車両制動装置を提供すること。
【解決手段】 前後加速度と推定した摩擦係数とに基づいて目標ホイルシリンダ液圧を算出する目標ホイルシリンダ液圧算出手段と、車輪がロックしそうなときにホイルシリンダ液圧を減圧し、ホイルシリンダ液圧の減圧後に、目標ホイルシリンダ液圧となるようにホイルシリンダ液圧を増圧し、ホイルシリンダ液圧の増圧後に、目標スリップ率となるようにホイルシリンダ液圧を増減圧するホイルシリンダ液圧制御手段とを設けた。
(もっと読む)
71 - 80 / 401
[ Back to top ]