
国際特許分類[B60T8/172]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用される制御パラメータを決定するもの,例.測定または検知されたパラメータに関する計算によるもの (401)
国際特許分類[B60T8/172]に分類される特許
41 - 50 / 401
車両の統合制御装置
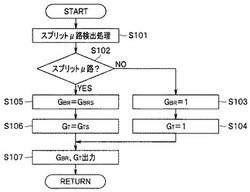
【課題】スプリットμ路を素早く検出し、適切なタイミングで車両の制御を実行する。
【解決手段】メイン制御部1で、左右のCCDカメラ1aにより得られた撮像画像を基に前方走行路がスプリットμ路であるいか否か判定し、前方走行路がスプリットμ路と判定された場合、衝突防止制御部2で設定するブレーキ介入距離を補正するブレーキ介入距離補正ゲインGBRを増加補正して、衝突防止制御部2は、このブレーキ介入距離補正ゲインGBRで補正したブレーキ介入距離を用いて通常より早いブレーキタイミングで衝突防止制御を行う。一方、前方走行路がスプリットμ路と判定された場合、エンジン制御部3で設定する目標トルクTtを補正する目標トルク補正ゲインGTを減少補正して発生する駆動力により、左右で異なった路面μによって車両にヨーモーメントが発生して車両が不安定になることを防止する。
(もっと読む)
電動車両の制御装置

【課題】回生協調ブレーキ制御時、旋回度合いに対応して車両挙動の安定性と回生量の確保との両立を図る。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段と、回生トルク制限手段S14→S15と、閾値決定手段S13と、を備える。回生トルク制限手段は、回生協調ブレーキ制御時、前後車輪速差が、決定された閾値より大きくなると回生トルクを制限する。閾値決定手段は、回生協調ブレーキ制御中における車両の旋回度合いを表す旋回状態量が、旋回度合いが高いことを表すほど前記閾値を下げた値に決定する。
(もっと読む)
車両用制御装置
【課題】実ヨーレートの急変の影響を受けることなく、実横加速度を適正に補正することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置(制御部20)は、実ヨーレートYsの変化率が所定値以上か否かを判断する急変判定手段209と、舵角センサ92で検出する舵角量に基づいて規範ヨーレートYcを算出する規範ヨーレート演算手段202と、急変判定手段209によって変化率が所定値未満であると判断された場合には、実横加速度Gysを実ヨーレートYsに基づいて補正し、急変判定手段209によって変化率が所定値以上であると判断された場合には、実ヨーレートYsを規範ヨーレートYcに切り替えて実横加速度Gysを補正する補正手段220と、を備えている。
(もっと読む)
車両の制動制御装置
【課題】ポンプの駆動態様の変更に起因した駆動音の大きさの変動によって車両の搭乗者に不快感を与えることを抑制できると共に、ポンプの駆動態様をホイールシリンダからリザーバ内に流入するブレーキ液の液量に応じた駆動様態に設定できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中において車両が走行している路面が高μ路から低μ路に変わっていない場合、偏差補正量Qreq_Aveと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように偏差ポンプ駆動制御を実行する。一方、ECUは、車両が走行している路面が高μ路から低μ路に変わった場合、緊急補正量Qreq_Skidと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように緊急ポンプ駆動制御を実行する。
(もっと読む)
コンピュータプログラム及び数値計算装置
【課題】分布定数系の微分方程式を少ない演算量で解けるようにする。
【解決手段】全ての計算時刻について値が与えられる第1の変数と、初期値のみが与えられる第2の変数とで定義される被積分関数に関する積分演算をコンピュータで実行し、各計算時刻で使用する前記第2の変数の値を算出するために、以下の処理を実行する。まず、被積分関数を第2の変数について偏微分して求めた偏導関数を記憶装置から読み出す。各計算時刻では、初期値又は直前回の計算時刻に算出された第2の変数の値と、現計算時刻に与えられる第1の変数の値を、被積分関数と偏導関数にそれぞれ代入して現計算時刻における被積分関数の値と偏導関数の値をそれぞれ算出する。この後、算出された被積分関数の値を初期値とし、かつ、当該被積分関数の値に偏導関数の値を乗算して算出された値を傾きとする指数関数を用い、次回計算時刻に使用する第2の変数の値を算出する。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
車両のドライバ操作量検出装置
【課題】同じコストで操作量検出精度を向上させること、あるいは、操作量検出精度を同等としながらコスト低減を図ること。
【解決手段】車両のドライバ操作量検出装置は、ドライバ操作量を検出するストロークセンサ1と、検出装置2と、入力回路32と、制御用ストローク生成部33と、を備えている。検出装置2は、ストロークセンサ1からの電圧値信号を、2系統のセンサ出力とする。入力回路32は、センサ出力1を、全ストローク域を検出範囲とする第1ストローク出力S1に変換し、残る一系統のセンサ出力2を、限定したストローク域を検出範囲とすることで分解能を高めた第2ストローク出力S2に変換する。制御用ストローク生成部33は、第1ストローク出力S1と第2ストローク出力S2を、ドライバ操作状態に基づいて切り替えることにより制御用ストロークStを生成する。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作量又はマスタシリンダ内の流体圧を検出するためのセンサを用いなくても、車両のエンジンを自動的に停止させるタイミングを設定することができる。
【解決手段】ブレーキ用ECUは、加速度センサからの検出信号に基づき車体加速度Gを演算し、該車体加速度Gに基づきマスタシリンダ内のMC圧Pmcに対応するMC圧加速度Amcを演算する。また、ブレーキ用ECUは、路面の勾配に対応する勾配加速度Agを演算する。そして、ブレーキ用ECUは、MC圧加速度Amcの絶対値が勾配加速度Agの絶対値以上となった場合に、エンジンの自動的な停止を許可する停止制御を行う(第3のタイミングt13)。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作に基づき車両のエンジンを自動的に停止させる機能を有する車両において、制動制御を阻害することなくエンジンを速やかに再始動させることができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に制動力が付与されない状態で走行する場合における車両の加速度の推定値として惰性加速度Dgを取得し(ステップS27)、該惰性加速度Dgに基づき第1車速推定値VS1を取得し(ステップS28)、取得した第1車速推定値VS1が制動制御許可基準値KVS未満である場合に(ステップS29:YES)、エンジンの再始動を許可する(ステップS30)。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
41 - 50 / 401
[ Back to top ]