
国際特許分類[B60T8/172]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用される制御パラメータを決定するもの,例.測定または検知されたパラメータに関する計算によるもの (401)
国際特許分類[B60T8/172]に分類される特許
11 - 20 / 401
車両操作支援装置
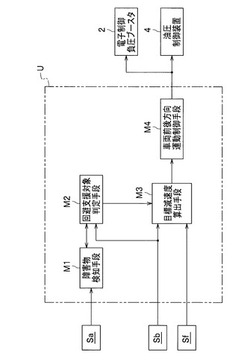
【課題】障害物の移動状態に応じた車両の操作支援を実行可能な車両操作支援装置を提供すること。
【解決手段】自車に対する障害物を検知し、その検知結果を用いて少なくとも障害物と自車との相対速度及び相対距離を検出する障害物検知手段M1を備え、検出の結果に基づいて障害物に対する回避支援を行う車両操作支援装置Uにおいて、自車速度と相対速度と相対距離とに基づいて、障害物が回避支援の対象となるか否かを判定する回避支援対象判定手段M2を備え、相対速度が自車速度と略等しい場合に、障害物を、少なくとも車両進行方向に移動していない停止障害物であると判定し、相対速度が自車速度と異なる場合にて、相対速度と相対距離とに基づいて算出した衝突余裕時間の単位時間当たりの減少量が所定の減少量以上の場合は、障害物を急接近障害物と判定し、所定の減少量未満の場合は、障害物をその他の障害物と判定する。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両

【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
電動パーキングブレーキ装置
【課題】路面の勾配に応じた荷重の目標値を短時間で決定可能な電動パーキングブレーキ装置を提供する。
【解決手段】電動パーキングブレーキ装置は、パーキングブレーキと、アクチュエータと、勾配センサと、荷重センサと、制御部と、を有している。制御部は、アクチュエータ目標荷重値を決定する荷重値決定と荷重センサの出力に基づいてアクチュエータによる荷重がアクチュエータ目標荷重値まで到達するようにアクチュエータを制御する駆動制御とを行う。制御部は、荷重値決定において、勾配センサからの勾配値の時系列における変曲点を判定し、変曲点以降の勾配値の時系列と予め定められたフィルタ係数とに基づいて、勾配値の収束値を推定することにより推定勾配を算出するフィルタ処理を行い、推定勾配に基づいてアクチュエータ目標荷重値を決定する。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
前後加速度推定装置
【課題】車両の前後加速度又は路面摩擦係数若しくは路面状態の推定精度を向上させることが可能な前後加速度推定装置を提供する。
【解決手段】前後加速度推定装置22は、加速操作又は減速操作の開始時点における前後加速度センサ42の検出値と、その後の前後加速度センサ42の検出値との差を、車両10の前後加速度の推定値として算出する加速度推定手段110を有する。
(もっと読む)
路面状態推定方法、及び路面状態推定装置
【課題】バネ下前後加速度と車輪速のデータとを用いて、走行中の路面の状態を精度よく推定する方法とその装置を提供する。
【解決手段】ナックル21に取付けられた加速度センサー11によりバネ下前後加速度を検出するとともに車輪速を検出して車輪速の変化量を算出した後、車輪速の変化量の変動幅とバネ下前後加速度の変動幅とを算出し、車輪速の変化量の変動幅とバネ下前後加速度の変動幅との関係から路面が凹凸のある路面であるか否かを判定し、凹凸のある路面である場合には、バネ下前後加速度を周波数分析して得られた周波数スペクトルの200Hz〜230Hz帯域内におけるピーク周波数を抽出し、このピーク周波数と、車輪速と、予め求めておいたピーク周波数と車輪速との関係を示す周波数判定式とを用いて凹凸のある路面が滑り易い路面であるか否かを推定するようにした。
(もっと読む)
車両の協調ブレーキ制御装置
【課題】コストアップや重量増加を招くことなく、運転者が要求する大きさの制動力を確保しつつブレーキ鳴きの発生を確実に防ぐことができる車両の協調ブレーキ制御装置を提供すること。
【解決手段】液圧制動力を発生する液圧ブレーキ5と回生制動力を発生する回生ブレーキ4を協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置18において、前記液圧ブレーキ5の最低液圧を設定し、前記液圧ブレーキ5を使用する場合には該液圧ブレーキ5を前記最低液圧以上の液圧で作動させる。具体的には、回生ブレーキ4の最高回生制動力を設定し、運転者が要求する制動力に対する最高回生制動力の不足分を液圧制動力で補い、該液圧制動力を発生させる液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ回生制動力を減少させる。
(もっと読む)
車両状態検出装置
【課題】車両に設置されたカメラ20で撮像された画像データに基づいて、自車両の状態を検出する車両状態検出装置であって、その検出精度を向上させることを目的とする。
【解決手段】制御装置10(CPU11)は、カメラ20で撮像された複数の画像データを取得して、この複数の画像データの夫々において特徴点を抽出し、時間的に連続する画像データにおいて、特徴点の位置を追跡処理することによって複数のオプティカルフローを導出する(S10〜S30)。そして、導出された複数のオプティカルフローにおいて、方向と大きさの両方が同じであるオプティカルフロー同士を一つのグループに分類するとともに、オプティカルフローが最も多く含まれるグループのオプティカルフローを、自車両に対応する自車オプティカルフローとして選択し、選択された自車オプティカルフローに基づいて自車両の状態を検出する(S50〜S70)。
(もっと読む)
駆動装置および駆動制御方法
【課題】制動装置の摩擦材の状態を精度高く推定し、推定された摩擦材の状態に基づいて車両の駆動力を適切に制御する。
【解決手段】ECUは、回生制動パワーPrgを算出するステップ(S100)と、発熱量Jを算出するステップ(S102)と、磨耗量ABを算出するステップ(S104)と、磨耗量ABがしきい値AB(0)よりも大きい場合に(S106にてYES)、駆動力制限制御を実行するステップ(S108)と、乗員に通知するステップ(S110)と、磨耗量ABがしきい値AB(0)以下である場合に(S106にてNO)、通常駆動力制御を実行するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
11 - 20 / 401
[ Back to top ]