
国際特許分類[B60T8/172]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用される制御パラメータを決定するもの,例.測定または検知されたパラメータに関する計算によるもの (401)
国際特許分類[B60T8/172]に分類される特許
31 - 40 / 401
車両制御装置
【課題】 横転傾向の判定精度を向上することができる車両制御装置を提供すること。
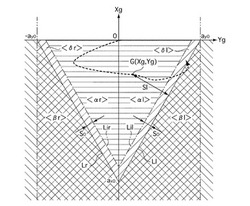
【解決手段】 車両に作用する複数方向の加速度(Xg,Yg)を合成した合成加速度Gを算出する合成加速度算出部と、複数方向の加速度の変化量dXg/dt ,dYg/dtを合成した合成加加速度dG/dtを算出する合成加加速度算出部と、算出された合成加加速度dG/dtを用いて車両の横転傾向を判定する横転傾向判定部と、を備えたコントロールユニット1を有する。
(もっと読む)
車両のABS制御装置

【課題】車両が凍結路等の低摩擦路面を走行中にABSが作動したときの車両の減速度不足感に伴う運転者の違和感を解消することができる車両のABS制御装置を提供すること。
【解決手段】Gセンサ4や車輪速センサ5の検出値に基づいて各車輪の最適回転速度を算出するABSコントローラ8と、該ABSコントローラ8からの制御信号によって電磁弁9を開閉制御してスリップ率が制御目標値となるようブレーキ圧を制御するABSアクチュエータ10を含んで構成される車両のABS制御装置において、外気温と車両速度が共に設定値以下である場合には制御目標スリップ率を常温・高速時の制御目標スリップ率に対してロック側に変更する。
(もっと読む)
車両用制動制御システム
【課題】走行路の路面摩擦係数μの変化に対する制動制御のロバスト性を向上できる車両用制動制御システムを提供すること。
【解決手段】この車両用制動制御システム1は、流体圧Pに応じた制動力を車輪11FRに付与するホイールシリンダ22FRと、車輪加速度DVWに基づいてホイールシリンダ22FRの流体圧Pを制御する制御装置4とを備えている。そして、制御装置4が、急制動の開始後かつABS制御の開始前に、所定の流体圧Pをホイールシリンダ22FRに付与して車輪加速度DVWの復帰レベルΔDVWを取得し、この車輪加速度DVWの挙動に基づいて流体圧Pの制御目標値を算出している。
(もっと読む)
路面勾配推定装置、車両用制御装置、及び車両用制御システム
【課題】車両の走行速度(実車速V)の微分値ACCw及び自身に加わる力に基づき加速度を感知する加速度センサの検出値ACCgに基づき、車両の走行する路面の勾配を高精度に推定することが困難なこと。
【解決手段】微分値ACCw及び検出値ACCgの差として、第1推定値ACCrgが算出され、これに所定の補正がなされることで第2推定値ACCrgpが算出される。第2推定値ACCrgpにローパスフィルタB48にてフィルタ処理を施すことで、勾配推定値ACCrgfが算出される。第1推定値ACCrgと、ローパスフィルタB50によりこれにフィルタ処理を施した遅延推定値ACCrgLとの差に基づき、勾配変化推定値Δを算出する。ローパスフィルタB48のカットオフ周波数fcは、上記勾配変化推定値Δに応じて可変設定される。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
アンチロックブレーキ制御装置
【課題】ABS制御を実行する車輪の回転速度のみに基づいて、実際の路面状態に沿ったABS制御を実行することができるアンチロックブレーキ制御装置を提供する。
【解決手段】アンチロックブレーキ制御手段65は、検知された回転速度Vに基づいて算出された前輪減速度Gが第1スリップ検出閾値G1を超えることで前輪WFのロック状態を判定すると共に、乗員の操作により生じているブレーキ圧を開放制御してロック状態を解消する。ブレーキ圧の開放制御に伴って前輪WFの回転が復帰する際に発生する復帰加速度Gfに基づいて、少なくとも路面摩擦の大きさに起因すると共に自動二輪車1の停止しやすさの指標となる推定減速度Gsを導出する路面摩擦推定手段66を具備する。アンチロックブレーキ制御手段65は、推定減速度Gsに応じて目標前輪回転車速Vmを算出し、ABS制御中は回転速度Vが目標前輪回転速度Vmに収束するようにブレーキ圧を制御する。
(もっと読む)
発進支援装置
【課題】電動車両における発進時の不安感を容易に解消することを可能にする。
【解決手段】電動車両の運転者の操作に応じてモータで発生させる要求駆動力を算出する要求駆動力算出部15と、電動車両を発進させるためにモータで発生させる必要がある発進可能駆動力を算出する発進可能駆動力算出部14とを備え、要求駆動力算出部15で算出した要求駆動力と発進可能駆動力算出部14で算出した発進可能駆動力とをもとに、当該要求駆動力と当該発進可能駆動力との乖離の度合いを提示する。
(もっと読む)
車両用情報処理装置および車両制御装置
【課題】車輪の滑りによる車両の挙動を精度よく判定することができる車両用情報処理装置および車両制御装置を提供すること。
【解決手段】車両100のヨーレートを検出するヨーレート検出部38によって検出されたヨーレートの向きに基づいて、車両の車輪の滑りによる車両の挙動を判定する車両用情報処理装置1、および車両用情報処理装置を備える車両制御装置1−1。車両用情報処理装置は、例えば、ヨーレートの向きが所定時間変化しない場合に上記挙動が生じていると判定する。
(もっと読む)
車両運動制御装置
【課題】車両の走行状態に適した運動制御を、より容易に行うことのできる車両運動制御装置を提供すること。
【解決手段】車両運動制御装置2に、車両1のタイヤ温度を取得するタイヤ温度取得部50と、車両1の運動を制御する運動制御部54と、を備え、運動制御部54は、車両1の走行状態に応じて、タイヤ温度取得部50で取得したタイヤ温度に基づく運動制御と、予め定められた所定値に基づく運動制御とを切替える。これにより、タイヤ温度に基づいて運動制御を行う場合には、走行時に変化するタイヤ温度に基づいて制御することにより適切な制御を行うことができ、所定値に基づいて運動制御を行う場合には、演算時間の短縮を図ったり、ECU40の負荷を低減したりすることができる。この結果、車両1の走行状態に適した運動制御を、より容易に行うことができる。
(もっと読む)
車両の制動力制御装置
【課題】 制動時における回生電力の回収効率の向上と車輪のロック状態の早期の回復とを両立させる車両の制動力制御装置を提供すること。
【解決手段】 電子制御ユニット26は、各輪11〜14がロックする傾向を有するとき、蓄電装置20を構成するバッテリのバッテリ容量Yが小さければ左右前輪11,12に設けられたインホイールモータ15,16を回生状態により作動させてモータ制動トルクを発生させるとともに左右後輪13,14に設けられたインホイールモータ17,18を力行状態により作動させてモータ駆動トルクを発生させる。一方、ユニット26は、容量Yが大きければ前輪11,12に設けられたモータ15,16を力行状態により作動させてモータ駆動トルクを発生させるとともに後輪13,14に設けられたモータ17,18を回生状態により作動させてモータ制動トルクを発生させる。
(もっと読む)
31 - 40 / 401
[ Back to top ]