
国際特許分類[B60T8/172]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用される制御パラメータを決定するもの,例.測定または検知されたパラメータに関する計算によるもの (401)
国際特許分類[B60T8/172]に分類される特許
21 - 30 / 401
制動力制御装置
【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
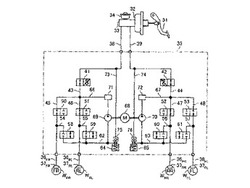
【解決手段】制動力制御装置はブレーキペダル31の操作により流体に圧力を発生させるマスタシリンダ33と、流体の圧力により制動力を発生させる制動装置37FL,37FR,37RL,37RRと、マスタシリンダと制動装置とを接続する配管と、配管内における流体の流れを遮断する第1の電磁弁(マスタカット弁41,42)と、制動装置に流れる流体の圧力を保持する第2の電磁弁(保持弁50,51,52,53)と、を備え、第1の電磁弁を制御する第1の差圧指示量と、第2の電磁弁を制御する第2の差圧指示量と、の差を所定値に制御することにより制動力を制御する。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置

【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う時定数可変の可変フィルタ処理部814と、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809と、建設車両の変速機の状態を判定する変速状態判定部808とを備え、時定数変更部809は、変速状態判定部808で変速機が変速中であると判定されると、可変フィルタ処理部814の時定数を現在よりも大きくする変速状態時定数変更部812を備える。
(もっと読む)
制動力制御装置
【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】マスタカット弁41は、磁性体(プランジャ)101と、コイル102と、スプリング103と、を備える。磁性体101は、第1液圧配管38と連結通路43との液圧差に応じた差圧作用力が開弁する方向に作用される。コイル102は、磁性体101が動くことにより、誘導起電力が発生する。誘導起電力は液圧が変化した際、特に運転者がブレーキペダル31を操作した際、コイル102に電磁誘導により電流が流れるようになっている。ブレーキペダル31を操作したことにより発生した電流をブレーキ液圧に換算して制動装置に導入する。これより、ブレーキペダル31によるブレーキ液圧を制動力制御装置に導入することができる。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】緊急制動操作されていない場合に、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御が不用意に開始されることを抑制することができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVに外乱に基づく振動成分が含まれるか否かを判定する(ステップS74,S76)。そして、ブレーキ用ECUは、含まれると判定した場合に(ステップS74又はステップS76がYES)、第1の減速判定値DV_stを、含まれないと判定した場合よりも大きな値に補正し(ステップS79)、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超える場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
車両制御装置
【課題】より多い頻度でホイールベースの値を取得して、より的確な車両制御が行えるようにする。
【解決手段】車両安定化制御において車両諸元としてホイールベースLを使用する場合に、ホイールベースLが変更されている場合にも対応できるようにホイールベースLの値を推定演算する。そして、少なくとも車両旋回中の車速もしくは車輪速度と、操舵角StrあるいはヨーレートYrのいずれかに基づいてホイールベースLの推定演算を行うようにすることで、より多い頻度でホイールベースLの値を取得する。また、このように推定演算したホイールベースLに基づいて、車両安定化制御を行う。これにより、ホイールベースLが変更されたとしても、的確なホイールベースLに基づいて的確な車両安定化制御を行うことが可能となる。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、設定されたジャークに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
【解決手段】所望の横移動距離Ye、速度の方向、現時刻の車体合成力の大きさF0、及び車体合成加速度の大きさの時間変化(ジャーク)KJを設定し、自車両の速度のx成分vx0、y成分vy0、Ye、F0/m、及びKJを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置へ到達する際の縦移動距離を最小化する車体合成力を求めるための第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、回避時間teの特定仮定下での値te’との関係を定めた3次元マップを用いて、KJに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
(もっと読む)
タイヤ接地状態推定装置
【課題】タイヤ接地状態の推定精度を向上させる。
【解決手段】転舵角、車速、及び前輪の路面摩擦係数に基づいて、前輪SAT推定値を推定し、車速に基づいて、後輪スリップ率推定値を推定し、転舵角、車速、及び後輪及び前輪の路面摩擦係数に基づいて、車両の横加速度推定値を推定する。一方、前輪のSAT検出値を検出し、後輪スリップ率検出値を検出し、車両の横加速度検出値を検出する。そして、前輪SATの推定値と検出値との差分で定義される前輪SAT推定誤差を演算し、後輪スリップ率の推定値と検出値との差分で定義される後輪スリップ率推定誤差を演算し、横加速度の推定値と検出値との差分で定義される横加速度推定誤差を演算する。そして、前輪SAT推定誤差、後輪スリップ率推定誤差、横加速度推定誤差のうち、少なくとも一つに応じて、後輪及び前輪の路面摩擦係数を補正する。
(もっと読む)
二輪車用車両制御装置及びその方法
【課題】本発明は、低速走行時においてより正確にウィリー走行の開始及び終了を検知することができる二輪車用車両制御装置の提供を目的とする。
【解決手段】自動二輪車のブレーキの制御を行う二輪車用車両制御装置において、ECUは、前後輪の速度比(vR/vF)を用いてウィリー状態を判定する(ステップS204、S212)。
(もっと読む)
21 - 30 / 401
[ Back to top ]