
国際特許分類[B60T8/1763]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | 車両の減速時の,過度の車輪のスリップの防止に特に適したブレーキ調整,例.ABS (492) | 車輪と地面との摩擦係数に応じるもの (55)
国際特許分類[B60T8/1763]に分類される特許
31 - 40 / 55
車輌用制動制御装置
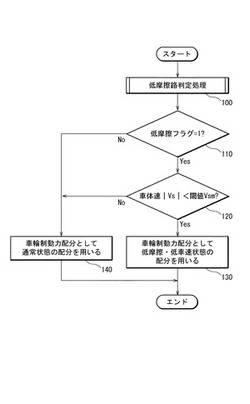
【課題】 低摩擦・低速状態の制動フィーリングを向上させることのできる車輌用制動制御装置を提供すること。
【解決手段】 本発明の車輌用制動制御装置は、車輪に車輪制動力を付与して車輌を制動させる車輪制動力付与手段と、この車輪制動力を制御する車輪制動力制御手段とを有しており、車輪制動力制御手段は、路面状態が所定状態よりも低摩擦側にあり、かつ、車速が所定値よりも低い状態にある低摩擦および低速状態であると判定した場合には、駆動輪に付与する車輪制動力を、低摩擦・低速状態ではなかった場合に駆動輪に付与される車輪制動力よりも増大させることを特徴としている。
(もっと読む)
自動二輪車用ブレーキ制御装置

【課題】後輪浮き上がりをより確実に抑制しつつ、操作フィーリングの向上を実現する。
【解決手段】自動二輪車用ブレーキ制御装置100は、自動二輪車の減速度に相関する減速度モニタ値を取得する減速度モニタ値取得手段21と、制動時の後輪浮き上がりが発生する限界減速度モニタ値に相関する制御目標値を設定する制御目標値設定手段23と、制御目標値に対する減速度モニタ値の不足分を監視し、その不足分の総和に相関する、不足分モニタ値を取得する不足分モニタ値取得手段24と、取得された不足分モニタ値が所与の第一条件を満たす場合に、ブレーキ装置の制動力の増加勾配を、制動力の増加制御開始時における増加勾配よりも大きく設定する制動力増加勾配設定手段25と、を備え、設定された増加勾配に基づいて車輪ブレーキの制動力を制動力制御手段26が制御する。
(もっと読む)
車両制御装置
【課題】カーブを走行する際、通過可能な車速となるように自車を減速させることができる車両制御装置を提供する。
【解決手段】カーブ道路を走行する際、そのカーブ道路に対して設定した目標速度Vs0_tまで自車を加減速するための目標加減速度dVs0/dtを算出し、自車の現在の速度Vs0と目標速度Vs0_tとを比較した結果に基づいて、自車に発生する加減速度が目標加減速度dVs0/dtとなるように加減速制御を行う。
(もっと読む)
編成列車のブレーキ制御方法
【課題】先頭車両に続く車両の車輪の摩耗を低減させる。
【解決手段】複数の車両1〜4を連結した編成列車5でブレーキ指令信号により指令されたブレーキ力を各車両1〜4の重量に対応した応荷重信号に基づいて車両1〜4毎に負担するブレーキ力を演算する編成列車のブレーキ制御方法において、雨天時を意味する雨天信号が入力された場合に先頭車両1の応荷重信号を0より大きく1より小さい所定の軽減係数を乗じた値として各車両1〜4毎に負担するブレーキ力を演算するようにしたものである。
(もっと読む)
自動二輪車用ブレーキ制御装置
【課題】後輪浮き上がりを抑制しつつ、運転者に与える空走感及びブレーキ操作の壁感を抑制することが可能な自動二輪車用ブレーキ制御装置を提供する。
【解決手段】自動二輪車用ブレーキ制御装置は、減速度モニタ値が第一の閾値以下であると判定された場合の増加勾配R1、減速度モニタ値が第一の閾値よりも大きいと判定され、かつ、車体速度モニタ値が第二の閾値よりも大きいと判定された場合の増加勾配R2、及び、減速度モニタ値が第一の閾値よりも大きいと判定され、かつ、車体速度モニタ値が第二の閾値以下であると判定された場合の増加勾配R3が、R1≧R2>R3≧0を満たすように増加勾配を設定する制動力増加勾配設定手段27Aと、増加勾配に基づいて前輪ブレーキFBの制動力を制御する制動力制御手段28と、を備えている。
(もっと読む)
自動二輪車用ブレーキ制御装置
【課題】後輪浮き上がりをより確実に抑制しつつ、より高い制動性を実現することが可能な自動二輪車用ブレーキ制御装置を提供する。
【解決手段】自動二輪車用ブレーキ制御装置100は、自動二輪車の減速度に相関する減速度モニタ値を取得する減速度モニタ値取得手段21と、制動時の後輪浮き上がりが発生する限界減速度モニタ値に相関する制御目標値を設定する制御目標値設定手段23と、制御目標値と減速度モニタ値との差が小さい場合の前輪ブレーキFBの制動力の増加勾配が、制御目標値と減速度モニタ値との差が大きい場合の前輪ブレーキFBの制動力の増加勾配よりも小さくなるように、前輪ブレーキ装置FBの制動力の増加勾配を繰り返し設定する制動力増加勾配設定手段24と、設定された増加勾配に基づいて前輪ブレーキFBの制動力を制御する制動力制御手段25と、を備えている。
(もっと読む)
制動制御装置、自動車及び制動制御方法
【課題】ABS制御で用いるブレーキアクチュエータの動作遅れに起因する制動力の振動の発生を抑制する。
【解決手段】ABS装置は、スリップ率の増加中に、制動摩擦係数が増加傾向から減少傾向に転じた時点の制動摩擦係数を検出する制動摩擦係数しきい値設定部32と、制動摩擦係数しきい値設定部32が傾向の変化を検出した際、その時点の制動摩擦係数に対応するスリップ率よりも小さいスリップ率の領域で、制動液圧制御時の制動摩擦係数が、制動摩擦係数しきい値設定部32が検出した制動摩擦係数に納まる範囲内となるよう制動液圧制御するABS制御部33と、を備える。
(もっと読む)
タイヤの摩擦状態判定装置、ABS装置、車両挙動制御装置及び自動車並びにタイヤの摩擦状態判定方法
【課題】タイヤの摩擦状態をより正確に判定する。
【解決手段】ABS装置では、stk=St_SUp_MUpではなく、かつstk=St_SDown_MDownでもない場合(ステップS11)、制御信号comk=−1をABSアクチュエータに出力する(ステップS13)。ABSアクチュエータ8では、入力される制御信号comk=−1により、キャリパ液圧を減圧する。ここで、状態変数stkが状態St_SUp_MUpの場合、又は状態変数stkがSt_SDown_MDownの場合とは、μ´<0かつω´<ωth´の場合であり、ωth´は(1−Spth)・v´/r、Spthは制動摩擦係数の極大値を与えるスリップ率のうち、最小値となるスリップ率、v´は車体前後加速度、rはタイヤの半径、ω´は車輪角加速度、μ´は制動摩擦係数の微分値である。
(もっと読む)
車両の状態推定及び制御装置
【課題】 路面摩擦係数の影響がヨーレイトなどの車両挙動として現れる前に、車両状態を推定可能とする車両の状態推定及び制御装置を提供する。
【解決手段】 第1のタイヤ横力和演算手段と、タイヤすべり角検出手段と、輪荷重推定手段と、制駆動反力推定手段と、推定輪荷重と推定制駆動反力とタイヤすべり角と路面摩擦係数に基づき、路面摩擦係数を演算する第2のタイヤ横力和演算手段と、路面摩擦係数の探索範囲を設定する探索範囲設定手段と、探索範囲中であって第2のタイヤ横力特性演算手段にもとづき演算される第2のタイヤ横力和の中から、第1のタイヤ和横力演算手段に基づき演算される第1のタイヤ横力和との差が小さくなる条件をみたす、第2のタイヤ横力和を探索する探索手段と、第2のタイヤ横力和から推定路面摩擦係数を推定する推定路面摩擦係数推定手段とを備えることとした。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】路面の摩擦係数に関わらず動的制動時における車両の操縦安定性を確保する電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10の制動力を変更する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40,60を、車両の走行状態に基づいて路面の推定摩擦係数を算出する摩擦係数推定部61と、パーキングブレーキ10が解除された状態において、推定摩擦係数に応じてパーキングブレーキ10の目標減速度を設定する目標減速度設定部41bと、パーキングブレーキ10の制動時に、目標減速度に応じて電動アクチュエータ20を制御する制御部41cとを備える構成とする。
(もっと読む)
31 - 40 / 55
[ Back to top ]