
国際特許分類[B60W10/06]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 推進装置の制御を含むもの (11,419) | 燃焼機関の制御を含むもの (4,007)
国際特許分類[B60W10/06]に分類される特許
31 - 40 / 4,007
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、電動発電機に異常が発生しても、車速に関わらず、蓄電手段を充電する。
【解決手段】ハイブリッド車両は、内燃機関と、入力軸及び出力軸を含む変速機構と、内燃機関又は駆動軸からのトルクを受けて逆起電圧により発電可能であると共に、駆動軸に駆動トルクを付与可能な電動発電機とを備える。ハイブリッド車両の制御装置は、電動発電機の回転軸を、入力軸に接続するイン接続と、変速機構を介することなく出力軸に接続するアウト接続との間で接続状態を切り替え可能な切替手段と、発電可能であり且つ駆動トルクが制御不能である所定種類の異常があるか否かを判定する異常判定手段と、接続状態がアウト接続である場合に蓄電手段が充電されるか否かを判定する充電判定手段と、所定種類の異常があると判定され且つアウト接続で充電されないと判定された場合に、イン接続に切り替える抑制手段とを備える。
(もっと読む)
ハイブリッド車両の制御装置および制御方法

【課題】ハイブリッド車両におけるエンジン始動に際してエンジンの振動が車体に伝達されるのを良好に抑制する。
【解決手段】ハイブリッド自動車の制御装置であるハイブリッドECUは、エンジンと車体との間に介設されるマウントの硬さの変動、すなわちマウント硬化フラグFhやマウント柔化フラグFsの設定状態に応じて運転者のアクセルペダルの踏み込み操作に関連したエンジン始動判定閾値であるエンジン始動トルクやエンジン始動パワーを補正により変化させる(ステップS450)。
(もっと読む)
動力出力装置の制御装置および制御方法
【課題】駆動軸に動力を出力可能なエンジンと、駆動軸に動力を出力可能な電動機と、駆動軸に動力を伝達するためのギヤ機構とを備えた動力出力装置において、エンジンの運転状態を負荷運転状態から無負荷運転状態へと移行させる際に振動や騒音の発生を良好に抑制する。
【解決手段】NV抑制フラグFnvが値1に設定されたのに伴ってエンジン22の運転状態を負荷運転状態から無負荷運転状態に移行させる際には、NV抑制動作ラインを用いて設定される目標回転数Netagまでエンジン22の回転数Neを上昇させてから要求パワーPe*や目標トルクTe*を値0に設定してエンジン22の出力トルクを低下させる(ステップS210〜S250)。
(もっと読む)
車両の制御装置
【課題】何れかのスロットルセンサに異常が有った場合でも、従来と比較して適切に車両を制御することができる車両の制御装置を提供する。
【解決手段】ECUは、第1および第2のスロットルセンサに異常が有るか否かを判定する(ステップS101)。そして、ECUは、スロットルセンサに異常が有る場合には、目標エンジントルクと実エンジントルクとの差が所定値より小さいか否かを判定する(ステップS103)。ECUは、当該差が所定値より大きい場合には、第1のスロットルセンサを異常と判定し(ステップS106)、第2のスロットルセンサを用いて目標スロットルバルブ開度となるようフィードバック制御を行う(ステップS107)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】内燃機関の始動時の燃料の供給量を適切に算出する。
【解決手段】制御装置(100)は、燃料の燃焼によって作動する内燃機関(200)及び充電池(500)に充電された電力を利用して作動する電動機(MG2)を備えるハイブリッド車両(10)であって、且つ内燃機関を始動することなく電動機の動力を用いたEV走行モードでの走行が可能なハイブリッド車両の制御装置であって、内燃機関の始動時に、内燃機関の始動までに行われていたEV走行モードでの走行距離に基づいて、前記内燃機関への燃料の実供給量を算出する算出手段(102)を備える。
(もっと読む)
車両および車両の制御方法
【課題】バッテリレス走行制御中にモータに印加される電圧が不安定となることを抑制する。
【解決手段】エンジン、モータ、ジェネレータ、モータおよびジェネレータに電気的に接続されたバッテリ、モータと駆動輪に連結された出力軸との間に設けられた変速機を備える車両において、ECUは、バッテリの故障時に、バッテリをモータおよびジェネレータから切離し、アクセルペダル操作量Aに応じたトルクをジェネレータから発生させることでジェネレータに発電させ、ジェネレータが発電した電力でモータを駆動させて車両を走行させる「バッテリレス走行制御」を行なう。ECUは、バッテリレス走行制御中(S20にてYES)、車速Vが制限車速Vshを越えると(S24にてYES)、アクセルペダル操作量Aのフィルタ処理を行なう(S25)ことで、ジェネレータとモータとの間の電力収支の崩れを抑制する。
(もっと読む)
ハイブリッド車両
【課題】段差を乗り越えるときに、ドライバに違和感を与えるのを抑制することが可能なハイブリッド車両を提供する。
【解決手段】ハイブリッド車両100は、駆動輪8を駆動するためのエンジン1およびモータMG2と、エンジン1およびモータMG2を制御するHVECU11とを備える。そして、HVECU11は、エンジン1の間欠運転時において段差を乗り越えるときにエンジン1の始動を禁止するように構成されている。
(もっと読む)
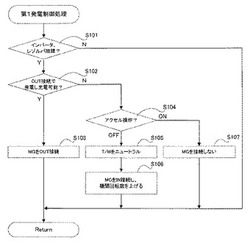
ハイブリッド車
【課題】走行中にモータのインバータの出力の1相が制御不能になった場合であっても長時間走行することのできるハイブリッド車を提供する。
【解決手段】ハイブリッド車100の第1モータ6aは、ギアセットを介してエンジン4と連動するとともに、セルモータと発電機を兼ねている。第2モータ6bは、ギアセットを介してエンジンと連動するとともに、車輪にトルクを伝達するギアセット出力軸に係合している。コントローラ8は、HVモードで走行中に、第1インバータの3相出力のうちの1相が制御不能の場合、第1インバータの3相出力を用いたモータ制御を停止するとともにエンジンを停止して第2モータだけで走行するEVモードへ移行する。次いでコントローラ8は、2相出力で第1モータを駆動するための駆動信号を第1インバータの制御可能な2相のスイッチング回路に与えて第1モータを駆動してエンジンを始動して再びHVモードに移行する。
(もっと読む)
車両の制御装置
【課題】燃費(電費)の悪化を回避しつつ、パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音を抑制する。
【解決手段】ECU200は、車速Vが予め設定された車速閾値V0以下であって、且つ、第1モータジェネレータMG1の動作状態がパルス幅過変調制御方式での制御が実行される動作状態となった場合に、エンジン1の回転数REを回転数RE1から回転数RE2へ増加させることによって、第1モータジェネレータMG1の回転数RMを回転数RM1から回転数RM2へ増加させて、第1モータジェネレータMG1の動作状態を矩形波電圧制御方式での制御が実行される動作状態に変更する。
(もっと読む)
ハイブリッド自動車
【課題】エンジン回転数のハンチングをより抑制しつつ急激な要求トルクの変化に対するエンジン回転数の追従性を確保する。
【解決手段】第1エンジン仮目標回転数Ne1*と、第2エンジン仮目標回転数Ne2*とが、エンジン目標回転数Ne*の変化方向が共に同じ方向になるような目標回転数である場合(S380又はS390でYES)には、前回Ne*と、第1上限値Ne1refを超えないように調整(S320〜S370)された目標回転数変化量ΔNe1*,ΔNe2*のうち絶対値の大きい方の値と、を加えた値をエンジン目標回転数Ne*に設定する(S400,S410)。それ以外の場合(S390でNO)には、前回Ne*と、第2上限値Ne2ref(<第1上限値Ne1ref)を超えないように調整(S350〜S370)された目標回転数変化量ΔNe2*と、を加えた値をエンジン目標回転数Ne*に設定する(S400,S410)。
(もっと読む)
31 - 40 / 4,007
[ Back to top ]