
国際特許分類[B60W10/20]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 操向装置の制御を含むもの (589)
国際特許分類[B60W10/20]に分類される特許
581 - 589 / 589
車両の挙動制御装置

【課題】操舵輪である前輪に作用する駆動力を利用して、効率良く、操縦安定性に優れ、回頭性の向上を図る。
【解決手段】トランスファクラッチ制御部30の前輪駆動力目標値演算部36では、前輪に現在作用する前後方向の力により生じる回頭モーメントが、前輪に作用する前後駆動力が前後駆動力が作用していないと云える予め設定しておいた範囲内において発生する横力により生じる回頭モーメントから、前輪に現在作用する横力により生じる回頭モーメントを減算した値以上となるように前輪の前後駆動力を演算し、この前輪の前後駆動力が得られるように前輪駆動力配分比演算部37は前後駆動力配分比を決定してトランスファクラッチ駆動部40に出力する。
(もっと読む)
動的な軸重移動を補償する方法
本発明は、車両の荷重の一部が少なくとも一方の前輪の上に偏るときの動的な軸重移動を少なくとも部分的に補償する、改善された方法を提案する。まず、軸重移動を補償するために、駆動トルク要求が与えられ、したがって、時間制限付きのほぼ最大の駆動トルクが要求される。さらに、本発明は、特許請求の範囲に記載の方法を実施するマイクロプロセッサ及び制御装置を初めて提案する。本発明は、このタイプの制御装置又はプロセッサが取り付けられる車両駆動装置にも関する。本方法を実施するソフトウェアも記載される。最後に、本発明は、特許請求の範囲に記載の方法を実施するソフトウェアを実行するために、このタイプの制御装置又はマイクロプロセッサを備える自動車に関する。 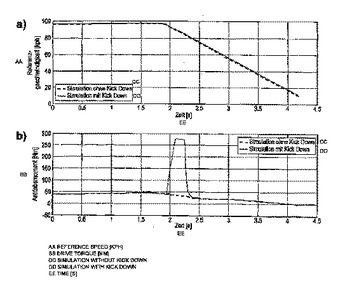 (もっと読む)
(もっと読む)
車両用支援システム
本発明は、車両用支援システム、特にエレクトロニックラリーコパイロットシステム、追い越し支援システムまたは右折優先通行支援システムに関する。本発明によれば、支援システムは少なくとも1つの制御ユニットを有し、この制御ユニットが認識したドライバー設定に基づいていわゆるグローバルデータ、ローカルデータおよび内部データの3つのグループから少なくとも1つのデータを選択し、これに依存して車両の走行ダイナミクスに関する出力信号が形成されるようにこれらを相互に結合する。本発明はさらに、3つ(ドライバー設定を入れれば4つ)のグループによって形成されたデータを有利には同時に処理する支援システムに関する。これにより、特に有利には、安全性に関するアプリケーションにとって特に重要なリダンダンシーが達成される。したがって本発明はこんにちの車両のラリーコパイロットシステム、追い越し支援システムおよび/または右折優先通行支援システムに適している。 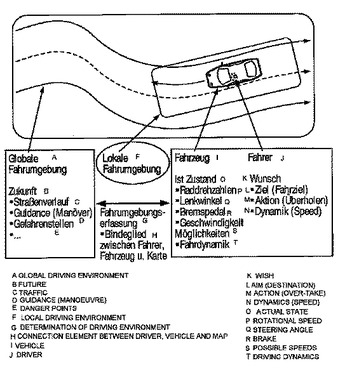 (もっと読む)
(もっと読む)
車両転覆軽減の方法および装置
車両の転覆事象を検出する方法を提供する。車両の横運動エネルギが、車両縦速度および車両横滑り角に応答して判定される。車両の横加速度が、測定される。タイヤ垂直力が、測定される。転覆潜在力インデックスが、横運動エネルギおよび横加速度に応答して判定される。転覆インデックスが、横加速度の要因およびタイヤ垂直力の要因によって転覆潜在力インデックスに重みを付けることによって判定される。比較を行って、転覆インデックスが所定の閾値を超えるかどうかを判定する。 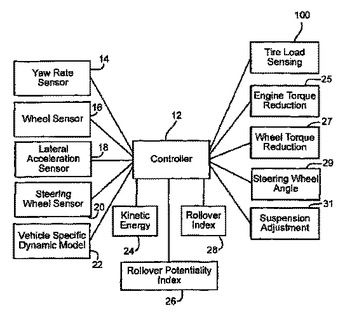 (もっと読む)
(もっと読む)
連結車両の制御システム

本発明は、牽引車両及びトレーラーから構成される連結車両の制御システム(7)に関する。このトレーラーは、台枠を積み込み輸送しかつ積み降ろすようになっており、この台枠は支持具の上に載せることができ、この台枠の上にペイロードが搭載される。この制御システムにおいて、径路を計算する径路コンピュータ(8)が設けられ、この径路コンピュータは、台枠(4)を積み込むためにトレーラーを後ろ向きに台枠の下に導く径路を計算する。
第1の入力装置(10)が設けられ、それによって、台枠の実際の位置及び実際の方位が径路コンピュータ(8)に入力されることが可能であれば、そしてまた、第2の入力装置(11)が設けられ、それによって、トレーラーの実際の位置及び実際の方位が径路コンピュータ(8)に入力されことが可能であれば、特に信頼性の高いシステムが得られる。この場合、径路コンピュータ(8)は、台枠の実際の位置及び実際の方位から、トレーラーに対する参照位置及び参照方位、すなわちトレーラーが台枠を積み込むために台枠の下に位置する位置及び方位を計算するように構成され、かつ、径路コンピュータ(8)は、トレーラーの位置及び方位の実際値と参照値とから、トレーラーを後ろ向きに台枠の下に導く径路を計算するように構成される。
(もっと読む)
事故による損傷を低減する方法及び装置
この発明は、車両の運転者が、事故を起こした車両を安全な場所に移動させることができない場合に、事故による損傷を低減するための方法及び装置に関する。その場合に、この発明では、システムが、好適な手法で車両の動き挙動に介入して、運転者の助け無しに(自律的に)、車両を安全な場所に移動させる形で、車両を制御するものである。 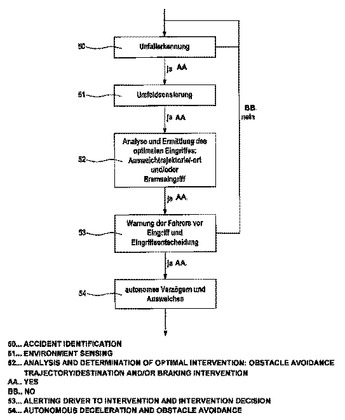 (もっと読む)
(もっと読む)
農業用または産業用の実用車のためのステアリングシステム、およびステアリングシステムを操作するための方法
本発明は、農業用または産業用の実用車のための、特にトラクタのためのステアリングシステムに関する。実用車(10)のアクスルの、好ましくは、フロントアクスル(20)の各半分に関して、電気的駆動装置(22、24)が備えられる。前記電気的駆動装置は、各アクスル半分に関連する少なくとも1つのホイール(26)を駆動することができる。電気的駆動装置(22、24)は、所定のトルクが、電気的駆動装置(22、24)から、駆動装置(22、24)が駆動するホイール(26)に伝達されることが可能であるような形で、制御されることが可能である。好ましくは、実用車(10)の機械的ドライブアクスルに関連する、特にリヤアクスル(12)に関連するホイール(26)が、実用車(10)の機械的駆動装置(16、18)によって駆動されることが可能である。また、本発明は、ステアリングシステムを操作するための方法にも関する。本発明の目的は、実用車(10)がカーブをうまく通り抜ける場合にも、牽引力が、電気的駆動装置(22、24)によって駆動されるホイール群(26)によって伝達されることを可能にし、それによって、特定のステアリング角において、前記ホイール群(26)の上で、特定の制動トルクが防止されるべきことである。実用車のステアリングをサポートするため、またはもたらすため、カーブの外側のホイールに伝達されるべきトルクは、カーブの内側のホイールに伝達されるべきトルクよりも大きい。 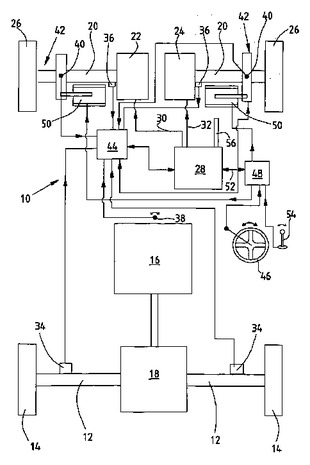 (もっと読む)
(もっと読む)
プロセスをコントロールするための、特に走行安定性をコントロールするための方法
調整パラメータが、コントロール変数の実測値と規定値の比較から決定されるコントロール偏差に依存して構成される、プロセスをコントロールするための方法において、コントロール変数の実測値が、第1のプロセスモデルによって決定され、コントロールの必要(10)が、コントロールの要求(20,30,40)が別のプロセスモデルによって決定されるコントロール変数の値に基づいて決定されかつ論理演算によって互いに結合されることによって、付加的にチェックされる。 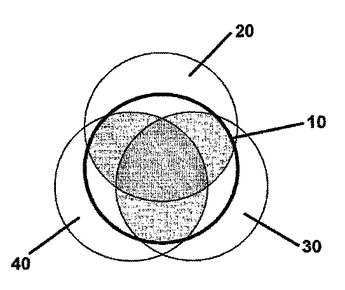 (もっと読む)
(もっと読む)
車両用走行動特性制御システム
この発明は、車両データと、周囲環境データと、運転者要求に関するデータとを入力データとして供給される少なくとも一つの信号分配部、並びに運転者に依存せずに調節可能な操縦部、運転者に依存せずに調節可能なシャーシ、運転者に依存せずに調節可能なブレーキ、運転者に依存せずに調節可能な駆動系統などの、車両の動特性を修正する複数の制御又は調節可能なサブシステムを有する、車両用の走行動特性制御システムに関する。この発明は、これらのデータが、中央演算ユニット(走行状態検出部、運転者要求検出部)の信号分配部に供給されることと、この中央演算ユニットが、この信号分配部のデータから、中心的な制御目標を計算して、この中心的な制御目標に関するデータが、中央制御パラメータ分配部又は中央走行状態制御部に供給されて、この中央制御パラメータ分配部又は中央走行状態制御部が、これらのサブシステムとの対話形式による通信により、これらのサブシステムを駆動して、これらのサブシステムが、この制御目標を、車両向けに変換することを特徴とする。  (もっと読む)
(もっと読む)
581 - 589 / 589
[ Back to top ]