
国際特許分類[B60W30/02]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | 車両の挙動安定化制御 (585)
国際特許分類[B60W30/02]の下位に属する分類
横転防止 (33)
国際特許分類[B60W30/02]に分類される特許
101 - 110 / 552
車両の自動操舵制御装置
【課題】車両を目標走行線に追従させるための操舵角修正が頻繁になることを防止すると共に乗り心地を快適に維持する車両の自動操舵制御装置を提供する。
【解決手段】道路に配置された指標から自車が走行するべき目標走行線を設定して自動操舵を行う車両の自動操舵制御装置であって、各タイヤにタイヤ圧力センサを備え、各サスペンションに該サスペンションを駆動するサスペンションアクチュエータを備え、上記各タイヤのタイヤ圧力の関数で定義される操舵安定状態量が所定値となるように上記各サスペンションアクチュエータを制御するコントローラを備える。
(もっと読む)
車両制御装置

【課題】車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行うこと。
【解決手段】設定した目標制御量又は/及び目標制御タイミングで車両10の挙動制御を行う車両制御装置において、車両総重量を推定又は検出する重量演算手段1eと、車両重心位置を推定又は検出する重心位置演算手段1dと、車両10の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段1cと、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両10が所望の旋回姿勢となる目標制御量又は/及び目標制御タイミングを設定する旋回制御手段1bと、を設けること。
(もっと読む)
走行制御装置
【課題】走行路面において車輪に対する摩擦抵抗が周囲に比べて小さい低摩擦領域がある走行路を走行する際に安定した状態に車両を維持することができるように車両の走行を制御する走行制御装置を提供する。
【解決手段】走行制御装置1は、路面において自車両100の車輪に対する摩擦抵抗が周囲に比べて小さい領域である低μ領域Aを取得し、取得した低μ領域Aの幅方向長さL2を取得する前方監視用センサ11と、自車両100に対する低μ領域Aの位置と、低μ領域Aの幅方向長さと、自車両100における左右の車輪間の長さL1とに基づいて、自車両100における左右の車輪のうち一方のみが低μ領域Aに進入することがないように自車両100の走行経路Rを制御する車両制御ECU19とを備えている。
(もっと読む)
車両の挙動制御装置
【課題】車輪に前後振動を与えることによる車輪の摩擦係数の増大効果を利用して、車両の制動停止距離を好適に短縮化する。
【解決手段】車輪の接地荷重を可変とし得るアクティブサスペンション機構400を備えた車両10において、ECU100は、アンチロック制御を実行する。当該制御においては、車両10が急制動状態にある場合に、アクティブサスペンション機構400により車両10に上下方向の振動が与えられる。一方、ECU100は、スリップ率SLが基準値を超えたタイミングと、車両振動が開始されたタイミングとに基づいて、タイヤμを最大とし得るピークスリップ率SLpkを推定するピークスリップ率SLpkが推定されると、ABS閾値がこのピークスリップ率SLpkに基づいて書き換えられる。
(もっと読む)
車両の駆動力制御装置
【課題】車両が低車速かつ大舵角旋回をおこなう場合に最大ヨーモーメントを発生させる駆動制御装置を提供すること。
【解決手段】車速が所定車速以下かつ操舵角が所定角以上で車両Veが旋回をおこなう場合に、キングピンオフセットを考慮して車両重心点P2の周りに発生させるヨーモーメントを算出し、その算出されたヨーモーメントが最大になるように車両Veの転舵角δL,δRが制御されるように構成されている。したがって、キングピンオフセットを考慮することにより、車両Veの旋回に適したヨーモーメントを算出することができるとともに、旋回動作中に車両Veに駆動力変化が生じず、車両Veの車両操作性を向上させることができる。
(もっと読む)
車両統合制御装置
【課題】車両安定性制御装置とサスペンション制御装置とを統合して、車両の走行安定性を高める。
【解決手段】オーバーステア時には、旋回外側の前輪3に制動力F1を加えて、車両1に旋回内向きのモーメントを発生させ、また、アンダーステア時には、車両1の旋回内側の後輪4に制動力F2を加えて、車両1に旋回外向きのモーメントを発生させると共に、旋回外側の前後輪3,5に適度な制動力F3,F4を加えて、車両1を減速させることによって車両1の安定性を確保する。このとき、制動力が加えられた車輪に対して、縮み側減衰力を大きくし、伸び側減衰力を小さくし、かつ、懸架ばねのばね力を小さくする。同時に、その他の車輪に対応する縮み側減衰力を小さく、伸び側減衰力を大きくする。これにより、制動力が加えられた車輪の接地荷重を大きくすることができ、車両安定性を向上させる。
(もっと読む)
車両の制御装置
【課題】実際のエンジントルクに応じた態様でオートマチックトランスミッションなどを制御する。
【解決手段】ピッチングおよびバウンシングなどの車両の上下方向の振動を低減するトルクを出力するようにエンジンを制御する制振制御が実行される。制振制御を中断した場合、制振制御を中断した後のエンジントルクの挙動が予測される。予測されたエンジントルクの挙動に応じて、オートマチックトランスミッションの変速が制御される。
(もっと読む)
車両制御装置、車両、及び車両制御プログラム
【課題】先行車の安全を確保しながらスムーズに追従させる。
【解決手段】追従車1は、先行車2の走行軌跡上の地点と当該地点における先行車2の車速を逐次対応づけて記憶する。追従車1は、記憶した地点のうち、自車よりも最小制御縦距離Dminより前方にある地点を制御直近点として選択し、自車が制御直近点に向かうように旋回指令を出力する。車速が大きいほど最小制御縦距離Dminが大きくなる。追従車1は、自車から制御直近点への方位角θrlが閾値α未満である場合には、目標点Pbcから自車までの目標点距離Ddが0となるように車速指令を出力し、α以上である場合には、制御直近点での先行車2の車速を車速指令として出力する。または、先行車2の地点、ヨーレート、及び車速を逐次対応づけて記憶し、追従車1の横加速度が先行車2の横加速度と等しくなるような車速指令も可能である。
(もっと読む)
車両挙動制御装置
【課題】 タイヤ摩擦円が小さくなる走行状況においても旋回能力の低下を抑制できる車両挙動制御装置を提供する。
【解決手段】 ヨーレイトFBベース値YRbaseが第2閾値YRt2より大きく、ステップS23の判定がYesとなった場合、ATTS−ECU16は、ステップS26でヨーレイトFBベース値YRbaseが第3閾値YRt3より大きいか否かを判定し、この判定がNoであれば、ステップS27でヨーレイトFBベース値−ヨーレイトFB値マップからヨーレイトFB値YRfbを検索/設定する。また、ヨーレイトFBベース値YRbaseが第3閾値YRt3より大きく、ステップS26の判定がYesとなった場合、ATTS−ECU16は、ステップS28でヨーレイトFB値YRfbを制限値YRrdとする。
(もっと読む)
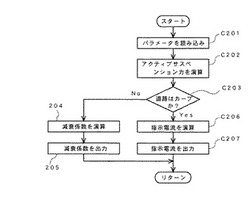
車両運動制御装置
【課題】路面摩擦変化によらず自動加速度制御中の操作性を確保する。
【解決手段】操作入力情報には車両に横運動を発生させる横運動操作指標を含み、車両運動情報には、車両に発生する前後加速度および車両横方向の運動を表す横運動指標を含み、横運動操作指標が所定値以下、または横運動指標が所定値以下の領域において、横運動操作指標と横運動指標が比例する略線形関係となる前後加速度最大値を操作性確保限界加速度とし、操作性確保限界加速度を制駆動力制御により車両に発生させる前後加速度の上限値として、制駆動トルク制御を行う車両運動制御装置。
(もっと読む)
101 - 110 / 552
[ Back to top ]