
国際特許分類[B60W30/02]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | 車両の挙動安定化制御 (585)
国際特許分類[B60W30/02]の下位に属する分類
横転防止 (33)
国際特許分類[B60W30/02]に分類される特許
71 - 80 / 552
車両のヨーモーメント制御装置
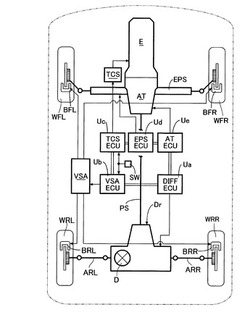
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
車両用左右駆動力調整装置の制御装置

【課題】二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】姿勢制御を行うためのトルク差を演算し(ステップS1、S2)、二次電池の充電率の増減に応じて、電動AYCモータとブレーキ装置へのトルク差の配分率を変動させて(ステップS3〜S6)、配分されたトルク差により電動AYCモータ及びブレーキ装置を各々制御して、姿勢制御を行う(ステップS6〜14)。
(もっと読む)
移動体の慣性制御装置及び方法
【課題】慣性制御装置及び方法において、例えば車両等の移動体の挙動をより適切且つ簡便に制御することを可能とする。
【解決手段】移動体の慣性制御装置(1)は、進行方向を基準にして移動体(100)の前方に位置する前方部に設けられ、進行方向を基準にして横方向に発生する前方部の第1横加速度を検知する第1検知手段(SF)と、進行方向を基準にして移動体の後方に位置すると共に前方部につられて横方向に横揺れする後方部に設けられ、横方向に発生する後方部の第2横加速度を検知する第2検知手段(SR)と、後方部に力を付与する力付与手段(10R、21R、10L、21Lなど)と、検知された第1横加速度と検知された第2横加速度との差に応じて、前方部と後方部との力の位相差を低減する所定力を後方部に付与するように力付与手段を制御する制御手段(8等)とを備える。
(もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
制駆動力制御装置
【課題】カーブ走行時における車両の走行状態を運転者の感覚に沿ったものとすることができる制駆動力制御装置を提供すること。
【解決手段】カーブ走行時の車両の制駆動力を制御する制駆動力制御装置であって、カーブの入口側において車両に前後方向の減速度が作用した状態で旋回を開始した後の減速時に、車両に作用する横加速度と前後方向の減速度とが予め設定された第一の関係となるように制駆動力を制御(S90)可能であり、第一の関係は、入口側において旋回を開始したときに車両に作用している横加速度および前後方向の減速度に基づく。制駆動力の制御を実行するか否かは、過去のカーブ走行時に運転者が運転操作をして車両に作用した横加速度と前後方向の減速度との関係である第二の関係に基づき判定される(S60)。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
オートバイに対して働く左右方向の力の削減のための方法及び装置
【課題】オートバイのカーブ走行の際に、後輪の横滑り、オートバイは棒立ち(ハイサイダー)を防ぐ制御装置及び方法を提供する。
【解決手段】カーブ走行の間にオートバイの後輪が左右方向にスリップする不安定な状態を後輪のスリップ角、操舵角、車体の傾斜状態、加速度、後輪のホイールスリップ等の変化度により検知して、ハイサイダーの危険が検知されると、ドライバーがその様な状況でエンジントルクを絞っても、エンジントルクの低下が自動的に制限される。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
車両の運動制御装置
【課題】ステア特性制御と安定化制御との間の制御干渉を抑制できる車両の運動制御装置を提供すること。
【解決手段】ステア特性制御としてスタビライザ制御、減衰力制御等が実行されて、車両のステア特性が車両の走行状態に応じて意図的に初期ステア特性から変更される。安定化制御では、オーバステア状態量Jos(アンダステア状態量Jus)がしきい値Tho(Thu)を超えた場合、制動トルクの調整により発生するヨーモーメントを利用してステア特性が初期ステア特性に近づけられる。ステア特性制御によりステア特性がオーバステア側(アンダステア側)に調整されている場合、しきい値Tho(Thu)が大きくされて、安定化制御が開始され難くなる。ステア特性制御によりステア特性が意図的に調整される傾向が安定化制御の介入により抑制される事態(制御干渉)が抑制され得る。
(もっと読む)
車両の制御装置
【課題】車両の挙動を安定に維持する。
【解決手段】前後の駆動力配分を調整可能な駆動力分配手段(300)及び転舵輪の舵角を補正可能な舵角補正手段(400)を備え、操舵機構に対し操舵トルクを付与可能な操舵トルク付与手段(500)を更に備える車両(10)は、オーバステア状態及びアンダーステア状態のうち少なくとも一方の状態を検出する検出手段(100)と、該少なくとも一方の状態が検出された場合に、前記検出された少なくとも一方の状態が抑制されるように前記挙動安定化手段を制御する第1制御手段(100)と、前記車両のアクセル開度を特定する特定手段(100)と、前記挙動安定化手段が制御される期間においてアクセル開度が所定値以上である場合に、前記操舵トルクの付与を介してドライバの注意が喚起されるように前記操舵トルク付与手段を制御する第2制御手段(100)とを具備する。
(もっと読む)
71 - 80 / 552
[ Back to top ]