
国際特許分類[B60W30/02]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | 車両の挙動安定化制御 (585)
国際特許分類[B60W30/02]の下位に属する分類
横転防止 (33)
国際特許分類[B60W30/02]に分類される特許
41 - 50 / 552
車体振動推定装置およびこれを用いた車体制振制御装置
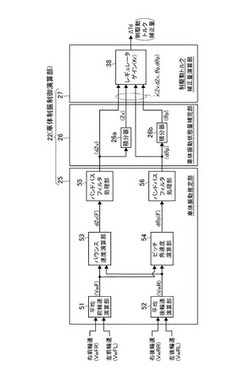
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置

【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段と、自車両の位置を取得する自車位置取得手段と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段と、を有し、車両運動制御演算手段は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算する。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
車両の制振制御装置
【課題】旋回性能を向上可能な車両の制振制御装置を提供すること。
【解決手段】車輪に制駆動トルクを発生させる制駆動トルク発生手段と、車両のピッチング振動とバウンス振動を抑制するような補正トルクを算出する補正トルク算出手段54と、前記補正トルクに基づいて前記制駆動トルク発生手段に対し補正トルク指令値を出力する補正トルク指令値出力手段56と、車両のピッチング振動よりもバウンス振動を優先的に抑制するような補正トルク指令値を算出するための優先度合いを設定する優先度合い設定手段55とを備えた。
(もっと読む)
車両の駆動力制御装置
【課題】加速応答性の向上と旋回性能の向上とを両立させることのできる車両の駆動力制御装置を提供することを目的とする。
【解決手段】車両のスタビリティファクタを目標値に追従させて変化させるように駆動力を制御する車両の駆動力制御装置において、前記駆動力の増大要求に基づいて前記目標値を求める目標値設定手段(ブロックB1〜B4)と、その目標値設定手段で求められた前記目標値とスタビリティファクタの実際値とに基づいてスタビリティファクタの補正量を求める補正量算出手段(ブロックB5〜B8)と、その補正量算出手段で求められた前記差が小さくなるように前記駆動力を増大させる駆動力補正手段(ブロックB10〜B12)とを備えている。
(もっと読む)
車両の操舵時挙動改善装置
【課題】前輪操舵、前輪電気駆動の車両において、操舵時における初期回頭性の改善を、サスペンション装置の変更ではなく、車輪駆動力の制御により実現する。
【解決手段】車輪駆動用モータの駆動トルクを(a)のように、操舵開始時t1から所定時間TM1sが経過する瞬時t2までの間は、目標モータトルクよりも(a)の実線波形で示す量だけ一時的に増大された値に制御する。(c)のt1〜t2間(初期)において旋回方向外輪の回頭モーメントMoutおよび旋回方向内輪の回頭モーメント(復元モーメント)Minの差による回頭モーメントが大きくなり、これによる見かけ上の横力の増大により、ヨーレートの増加分が(b)に実線で示すごとく瞬時t1〜t2の初期において速やかに立ち上がり、ヨーレートを遅滞なく上昇させ得て、車両の操舵応答(初期回頭性)を大幅に改善することができる。
(もっと読む)
車両
【課題】車両の進路上の路面変化に対応した適切な駆動力配分を前以て実現することができる車両を提供する。
【解決手段】車両のメインECU3は、第1情報取得部4Aにより取得された第1情報から導出される第1位置の路面摩擦係数である第1摩擦係数μ1と、第2情報取得部4Bにより取得された第2情報から導出される第2位置の路面摩擦係数である第2摩擦係数μ2とから、車両の総駆動力の目標値を決定する。そして、総駆動力の目標値を満たし且つ第1摩擦係数μ1に対応したスリップ限界を超えないように、第1駆動力および第2駆動力の目標値を決定する。
(もっと読む)
ドライバー支援システム及びドライバー支援システムの調整のための方法
【課題】車両の中のブレーキ装置と車の車軸の二つの駆動車輪の間のアクティブリミテッドスリップデフとの間の、改良され且つ簡単化されたネットワークを作る。
【解決手段】ドライバー支援システムは被駆動車軸の車輪の上のブレーキ装置4並びにリミテッドスリップデフ3を含んでいる。少なくとも開ループまたは閉ループのいずれかを有する制御ユニット1の中で制動トルク又はロックトルクが求められ、その際少なくとも開ループまたは閉ループのいずれかを有する制御ユニット1の後方に配分モジュール2が接続されており、この配分モジュール2の中でブレーキ装置4及びリミテッドスリップデフ3の制御のための制御信号を生み出すことが出来る。
(もっと読む)
駆動力制御装置
【課題】車両の走行時におけるステア特性を向上させることができ、かつ、運転者が違和感を持つことを抑制することの可能な駆動力制御装置を提供する。
【解決手段】車両のステア特性を目標ステア特性にするべく、車両の駆動輪の駆動力を制御する駆動力制御装置において、車両の運転者の意図から求めた駆動輪の基本駆動力に対して、車両のステア特性を相対的に向上させるために増加する分の駆動力を求める第1算出手段(ステップS1)と、増加する分の駆動力の上限値を複数の条件に基づいて複数求める第2算出手段(ステップS2,S4,S5)と、第1算出手段により求められた増加分の駆動力を、第2算出手段により求められた複数の上限値のうち最も小さい上限値により制限して、最終的な駆動力の増加量の上限値を求める第3算出手段(ステップS6,S7)とを備えている。
(もっと読む)
41 - 50 / 552
[ Back to top ]