
国際特許分類[B60W30/02]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | 車両の挙動安定化制御 (585)
国際特許分類[B60W30/02]の下位に属する分類
横転防止 (33)
国際特許分類[B60W30/02]に分類される特許
51 - 60 / 552
車両の駆動制御装置
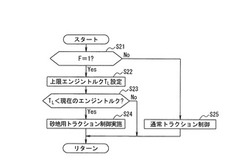
【課題】砂地を検出して、砂地に適合させて駆動輪の駆動を制御する。
【解決手段】駆動輪が駆動されたことを検出し、かつ駆動輪の下方向への移動を検出した場合、車両の走行路が砂地であると判定する。砂地走行と判定時、駆動輪スリップ防止のため、駆動輪の駆動トルクが予め設定したしきい値まで減少するようにエンジントルクを制御するとともに、しきい値は、車体速度が大きくなるほど大きな値に変化させる。
(もっと読む)
制動制御システム

【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
車両用パワートレーン制御装置
【課題】駆動系保護のために行われる出力トルク制限の解除可否を適切に判定する車両用パワートレーン制御装置を提供する。
【解決手段】走行用動力源の出力トルクを制御する車両用パワートレーン制御装置100を、出力トルクを要求トルク入力手段の操作量に関わらず所定の制限トルク以下に制限する出力トルク制限手段と、出力トルク制限の解除操作が入力される解除操作入力手段107と、タイヤのグリップ余力を判定するグリップ状態判定手段110とを備え、出力トルク制御手段は解除操作が入力されかつ要求トルク入力手段の操作量が所定値以上である場合に、所定のトルク制限解除期間にわたって出力トルク制限を解除するとともに、グリップ余力の不足を判定した場合は出力トルク制限の解除を禁止する構成とする。
(もっと読む)
車両の運動制御装置
【課題】実車挙動観測装置が推定する推定運動状態量の誤差が大きい場合であっても運転者が受ける違和感を軽減できる車両の制御装置を提供することを課題とする。
【解決手段】実車1に備わるヨーモーメント制御量算出部37aが算出して規範モデル301に入力する仮想外力MVFBの成分のうち、すべり角偏差βerrを含んだβ成分の大きさが、ヨーレート偏差γerrを含んだγ成分の大きさより大きい場合、ヨーモーメント制御量算出部37aは、β成分の大きさがγ成分の大きさより小さくなるようにすべり角偏差βerrを補正する。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両制御装置
【課題】データ量を抑えることができ、実現性の向上を図ることができる車両制御装置を提供する。
【解決手段】車両制御装置1では、運転者の通常ブレーキの減速度αnormalに基づいてカーブの入口に到達したときの車速Vcurve及びカーブへの進入時における最大車速Vthreshを求め、車速Vcurveが最大車速Vthreshよりも大きい場合に、運転支援制御を実施させている。このように、運転者の通常ブレーキの減速度αnormalを記憶するだけで、適切な運転支援を行うことができるため、運転者毎にカーブ等のパラメータを記憶する必要がない。したがって、データ記憶容量に記憶されるデータ量を抑えることができ、実現性の向上を図ることができる。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車両の制振制御装置
【課題】 駆動出力制御による制振制御に於いて、エンジンのスロットル弁の可動部の摩耗などの特性の変化を管理し、その過度な進行を回避すること。
【解決手段】 本発明の車両の駆動出力を制御してピッチ又はバウンス振動を抑制する制振制御装置であって、車両の車輪と路面との接地個所に於いて発生する車輪トルクに基づいてピッチ又はバウンス振動振幅を抑制するようエンジンの駆動トルクを制御する制振制御部と、エンジンのスロットル弁の可動部の摩耗状態量などの特性の変化に基づいて、制振制御部により算出される制振制御のための車輪トルクを補償する補償成分の大きさを変更する補償成分調節部とを含み、スロットル弁可動部の特性の変化の過度な進行を抑制する機能を有する。また、車両の走行中に、スロットル弁可動部の特性の変化状態を推定する新規な構成が提供される。
(もっと読む)
ハイドロプレーニングを自動的に防止する方法
本発明は、走行区間において自動車の走行作動中にハイドロプレーニングを自動的に防止する方法に関し、本発明によれば、
a)ハイドロプレーニングの危険に関して区間部分に関係する情報が自動車に準備され、
b)ぬれた車道を検出する少なくとも1つのセンサ装置が設けられ、
c)ハイドロプレーニングの危険を持つ走行区間の区間部分が存在し、かつぬれた車道が検出されると、ハイドロプレーニングを防止する援助機能が実施される。
(もっと読む)
51 - 60 / 552
[ Back to top ]