
国際特許分類[B60W30/04]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | 車両の挙動安定化制御 (585) | 横転防止 (33)
国際特許分類[B60W30/04]に分類される特許
1 - 10 / 33
インホイールモータを利用した車両制御方法
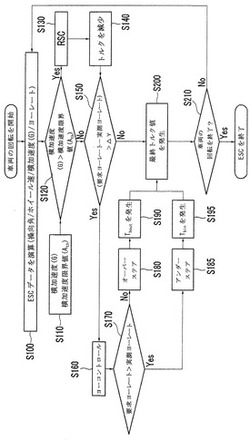
【課題】車体の安定性を確保するために、ESCシステムではなくインホイールシステムを利用することにより、車両を安定的に制御することができるインホイールモータを利用した車両制御方法を提供する。
【解決手段】操向角、ホイール速度、横加速度、ヨーレートを演算する段階、横加速度と予め設定された横加速度限界値を比較する段階、操向角、ホイール速度に基づいた運転手が要求する要求ヨーレートと車両の実測ヨーレートの差を予め設定されたヨーレートコントロール基準値と比較する段階、要求ヨーレートと実測ヨーレートの差がヨーレートコントロール基準値よりも大きい場合には、要求ヨーレートと実測ヨーレートを比較する段階、要求ヨーレートと実測ヨーレートの差によって最終トルク値を発生させる段階を含むことを特徴とする。
(もっと読む)
車両の姿勢制御装置

【課題】走行面の凹凸、横風、急旋回動作等によって生じるロール振動を抑制することができる技術を提供する。
【解決手段】 この車両10は、車体20の左右に回転可能に取付けられている2つの駆動輪12a,12bを異なる駆動トルクで駆動可能となっている。この車両は、車体20のロール振動を抑制する姿勢制御装置32を備えている。姿勢制御装置32は、車体20のロール角を検出するロール角検出手段30と、ロール角検出手段で検出されるロール角の微分値に基づいて、左右の駆動輪に駆動トルク差が生じるように各駆動輪を駆動する制御部を有している。
(もっと読む)
車両重量の推定装置、車両重量の推定方法及び車両の横転抑制装置
【課題】様々な精度の車両重量データが収集される車両の走行条件の基で、車両重量の推定値の正確性を、車両重量データの収集状況に応じて向上させることができる車両重量の推定装置、車両重量の推定方法及び車両の横転抑制装置を提供する。
【解決手段】ブレーキ用ECUは、所定周期毎に、車両の前後方向加速度Gxを演算し(ステップS13)、該前後方向加速度Gxを用いて車両重量データMを演算する(ステップS20)。そして、ブレーキ用ECUは、前後方向加速度Gxが大きい場合にステップS20で演算した車両重量データMに対する比重を、前後方向加速度Gxが小さい場合にステップS20で演算した車両重量データMに対する比重よりも大きくする重み付け平均処理を行い、該処理で演算された値を車両重量の推定値MSとする(ステップS23)。
(もっと読む)
車両横転限界速度演算装置
【課題】
走行状態、車両操作状態の検出が必要でなく、車両の重心情報、車両のトレッド幅、及び車両が走行する道路のカーブの曲率半径に基づいて、走行する前に横転限界速度を演算して、前記運転限界速度と前記カーブに関連づけて利用することができる車両横転限界速度演算装置を提供する。
【解決手段】
重心位置測定装置1は車両の車両幅方向重心位置、車両全長方向重心位置、車両のトレッド幅、車両が走行する道路のカーブの曲率半径に基づいて、車両が横転する速度の下限である横転限界速度を演算する。又、重心位置測定装置1は、算出した横転限界速度をカーブに関連付けて出力するプリンタ39、表示装置42、I/Oインターフェイス54を備える。
(もっと読む)
追従制御装置
【課題】コストを抑制する上で有利なロールオーバ検出装置を提供する。
【解決手段】先行車両がない場合、自車両前方の時系列の画像から消失点Pを検出し、第1の水平基準H1を設定し、レーンマーカロールオーバ判定手段123Dにより、第1の水平基準H1の回転角から自車両100のロールオーバを判定する。先行車両があると、車両後方の特徴から水平エッジを抽出し、第2の水平基準H2を求める。レーンマーカを検出できない場合、第2の水平基準H2のみでフレーム画像間で一定以上の回転が生じているか否かを判定し、一定以上の回転が生じていなければ“ロールオーバ無し”、一定以上の回転が生じていれば“ロールオーバ有り”と判定する。レーンマーカを検出できる場合、第2の水平基準H2とレーンマーカとに一定以上の回転が生じていると判定されると“ロールオーバ有り”と判定する。
(もっと読む)
車両、及び車両制御プログラム
【課題】車体の傾斜を許容角度以内に保ちながら旋回時の安定性を実現する。
【解決手段】車両1は、車体部10の傾斜角度を監視し、傾斜角度が所定の限界値に達する場合、スロットル開度センサ12のスロットル開度Sに対する駆動輪のトルクゲインを低く調節する。即ち、傾斜角度が限界値を越えそうな場合、スロットル操作の効き具合をなまらせる。これにより、傾斜角度が限界値を超えるような車速を抑制することができ、車両1は、安定して旋回することができる。また、車両1は、傾斜角度の検出値に、当該検出値の微分を加えることにより傾斜角度の直近の未来の値を予測し、車体部10の傾斜角度として当該予測値を用いることにより精度の高い制御を行っている。
(もっと読む)
車両の運動制御装置
【課題】具体的な制御指針をドライバに提示することにより、ドライバが自己の運転操作に対する指針を得られるような車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。情報提示手段は、運転者に操舵を開始するタイミング決定のための情報を提示する。情報提示手段により提示される情報に基づいて、運転者により前記操舵開始タイミングが制御される。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
転覆を検出する方法
車両横加速度、車両横速度及び車両縦軸線の周りの少なくとも1つの回転状態量を考慮して転覆を検出する方法が紹介され、車両横速度から並進エネルギ値を求め、回転状態量から回転エネルギ値を求め、これらのエネルギ値から修正パラメータを求めることによって、車両横速度及び/又は車両横加速度のための修正パラメータが求められる。  (もっと読む)
(もっと読む)
車体傾動制御装置及びその方法
【課題】車体を傾動させる装置が正常でない場合に、車体の姿勢を車両の走行に適合した姿勢にする。
【解決手段】車体傾動制御装置は、車両前後方向に少なくとも2つ配置されそれぞれ、ロール方向に車体を傾動させる車体傾動装置21F,21Rと、車輪を転舵させる運転者の運転操作に応じて、各車体傾動装置21F,21Rを駆動制御する車体傾動装置駆動部25F,25Rと、各車体傾動装置21F,21Rが正常か否かを判定する車体傾動装置異常判定部31と、ロール方向の車体の姿勢を固定する車体傾動停止装置26と、を備え、車体傾動装置駆動部25F,25Rが、車体傾動装置異常判定部31が車体傾動装置21F,21Rの1つが正常でないと判定すると、車体傾動装置異常判定部31が正常と判定した車体傾動装置21F,21Rを駆動制御して、車体の姿勢をロール方向で中立姿勢にし、車体傾動停止装置26が、その中立姿勢に固定する。
(もっと読む)
1 - 10 / 33
[ Back to top ]