
国際特許分類[B60W30/02]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | 車両の挙動安定化制御 (585)
国際特許分類[B60W30/02]の下位に属する分類
横転防止 (33)
国際特許分類[B60W30/02]に分類される特許
11 - 20 / 552
制駆動力制御装置および制駆動力制御方法
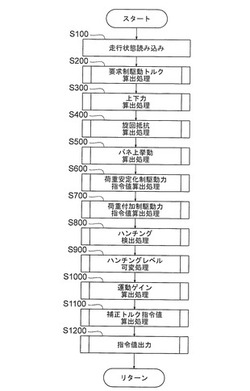
【課題】制駆動力による車体の制振制御を操舵状態に応じてより適切に行うこと。
【解決手段】車両の走行状況に基づいて、車体のバネ上挙動を推定する挙動推定手段と、推定した車体のバネ上挙動に応じて、車両の荷重を安定化させるための荷重安定化補正トルクを算出する荷重安定化補正トルク算出手段と、推定した車体のバネ上挙動に応じて、車両の荷重を付加するための荷重付加補正トルクを算出する荷重付加補正トルク算出手段と、荷重安定化補正トルクおよび荷重付加補正トルクに基づいて、制駆動トルクを補正する制御にハンチングが発生しているか否かを判定するハンチング判定手段と、車両における操舵状態と、ハンチング判定手段の判定結果とに基づいて、荷重安定化補正トルクおよび荷重付加補正トルクの付与度合いを決定する運動ゲインを算出する運動ゲイン算出手段とを有する制駆動力制御装置とした。
(もっと読む)
車両

【課題】前輪と後輪に付与する駆動力を調整することで車高を変更することができるようにした車両を提供する。
【解決手段】車体12と、車体12の進行方向前側に設けられる前輪14と、車体12の進行方向後側に設けられる後輪16と、前輪14に駆動力を付与する前輪電動モータ18と、後輪16に駆動力を付与する後輪電動モータ20と、前輪14と車体12とを接続する前輪サスペンション22と、後輪16と車体12とを接続する後輪サスペンション24と、前輪サスペンション22および後輪サスペンション24を通じて車体12に重力方向における所定の荷重が生じるように、前輪電動モータ18が前輪14に付与する駆動力の大きさおよび後輪電動モータ20が後輪16に付与する駆動力の大きさを調整する調整手段26とを有するように構成する。
(もっと読む)
自動車の重心の連続計算
【課題】自動車の重心を計算するシステムおよび方法を提供すること。
【解決手段】1つの方法は、x軸、y軸、およびz軸に沿った自動車の第1、第2、および第3の加速度を判定するステップと、x軸、y軸、およびz軸に沿った自動車の第1、第2、および第3の角速度を判定するステップと、自動車に作用する合力を判定するステップと、自動車の見積質量を判定するステップとを含む。本方法は、第1の加速度、第2の加速度、第3の加速度、第1の角速度、第2の角速度、第3の角速度、自動車に作用する合力、および見積質量に基づいて、自動車の重心を計算するステップをさらに含む。
(もっと読む)
車両の制御装置
【課題】アクセル操作及びブレーキ操作が同時になされている同時操作状態が解除されて出力抑制制御を停止するに際して車両走行姿勢の安定化をより高い次元で実現することのできる車両の制御装置を提供すること。
【解決手段】アクセル操作及びブレーキ操作が同時になされている同時操作状態を検出したことを条件に機関出力をアクセル開度に基づく基準出力よりも低下させる出力抑制制御を実行する(ステップS21)とともに車両走行姿勢を安定化させる姿勢安定化制御を無効化する(ステップS22)。そして、アクセル操作及びブレーキ操作のうち少なくとも一方の操作が解除されることを条件に姿勢安定化制御の無効化を解除(ステップS24)してその後に出力抑制制御を停止する(ステップS25)。
(もっと読む)
車両制御装置
【課題】エンジン再始動時の再加速性や発進性の低下を抑制できる車両制御装置を提供すること。
【解決手段】車両100の走行中にエンジン1を停止した後のエンジンの再始動時に車両挙動安定化制御を制限する。車両の走行中のエンジンの停止は、エンジンと車両の駆動輪8との動力の伝達が遮断された状態で惰性により車両を走行させる惰性走行に基づくことが好ましい。また、車両挙動安定化制御は、車両の駆動輪に対する駆動力の配分を制御する駆動力配分制御、あるいはトラクション制御の少なくともいずれか一方を含むことが好ましい。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】車両の安定性を向上可能な制御装置を提供すること。
【解決手段】車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記車両の走行状態が不安定である場合、前記副駆動輪駆動力を制限する副駆動輪制限駆動力を前記第1の制御手段に要求する第2の制御手段と、前記主駆動輪駆動力及び前記副駆動輪駆動力の元である原動機駆動力を制御する第3の制御手段と、を備える。前記第3の制御手段は、前記副駆動輪制限駆動力に基づき前記原動機駆動力を減少させる。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】不必要な算出を抑制可能な制御装置を提供すること。
【解決手段】車両に働く駆動力を制御する制御装置は、前記駆動力を制御する第1の制御手段と、前記駆動力の制限を前記第1の制御手段に要求する第2の制御手段と、を備える。前記第2の制御手段は、前記第1の制御手段から出力される前記駆動力を入力する入力部と、前記駆動力を制限する制限駆動力を算出する算出部と、を有する。前記制限駆動力から前記駆動力を減算した第1の値が閾値以上である場合、前記算出部は、前記制限駆動力よりも大きい第2の値を出力する。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】車両の安定性を向上可能な制御装置を提供すること。
【解決手段】車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記車両の走行状態が不安定である場合、前記副駆動輪駆動力を制限する副駆動輪制限駆動力を前記第1の制御手段に要求する第2の制御手段と、を備える。前記第2の制御手段は、前記車両の横加速度に基づき第1の制限駆動力を算出する第1の算出部と、前記車両の前後加速度に基づき第2の制限駆動力を算出する第2の算出部と、を有する。前記第2の制御手段は、前記第1の制限駆動力及び前記第2の制限駆動力のうちの最大の制限駆動力を前記副駆動輪制限駆動力として前記第1の制御手段に要求する。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
車両の駆動輪に働く駆動力を制限する駆動力制限装置
【課題】推定速度の精度を向上可能な駆動力制限装置を提供すること。
【解決手段】車両の駆動輪に働く駆動力を制限する駆動力制限装置は、前記車両の第1の加速度を補正して、補正された前記第1の加速度を第2の加速度として得る加速度補正部と、前記駆動輪の車輪速度及び前記第1の加速度に基づき前記車両の第1の速度を算出する第1の算出部と、前記車輪速度及び前記第2の加速度に基づき前記車両の第2の速度を算出する第2の算出部と、前記第1の速度と前記第2の速度との差が第1の閾値以上である場合、前記駆動力を制限する制限駆動力を要求する要求部と、前記第2の速度を前記車両の推定速度として用いる推定部と、を備える。前記要求部が前記制限駆動力を要求することによって、前記車輪速度が第2の閾値を下回る時、前記推定部は、前記第2の速度を前記第1の速度でリセットして前記推定速度を得る。
(もっと読む)
11 - 20 / 552
[ Back to top ]