
国際特許分類[B61D47/00]の内容
処理操作;運輸 (1,245,546) | 鉄道 (8,211) | 鉄道車両の種類または車体細部 (2,094) | 車両に取付けられた積荷,荷卸し装置,例.積荷用プラットホーム (72)
国際特許分類[B61D47/00]に分類される特許
1 - 10 / 72
ワーク搬送システム
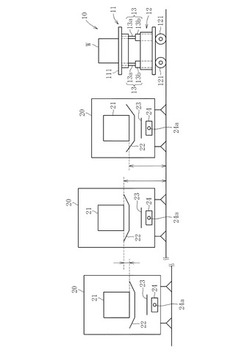
【課題】搬入台車上のワークの高さの調整を容易に行い、また、工場内のレイアウトを自由に設定できるようにする。
【解決手段】走行機構121を備える台車本体12と前記台車本体12に対して昇降可能に連結されてワークWを載置する載置部11とを有する搬送台車10と、搬入口21から搬入される前記ワークWに加工処理を行う工作機械20とを備えるワーク搬送システムであって、前記搬送台車10に、前記載置部11に取り付けられる係合部112を設け、前記工作機械20に、前記係合部112と係合して前記載置部11を上下方向にガイドする昇降ガイドレール22を設け、前記搬送台車10の走行によって前記係合部112が前記昇降ガイドレール22によりガイドされ、前記載置部11が前記搬入口に対して所定の高さとなるように位置決めされる。
(もっと読む)
苗箱敷設機に苗箱を補給する苗箱補給システム

【課題】運搬車の周囲は苗箱が敷き詰められて作業者は運搬車の傍に近づけられないため運搬車の操作がしにくいという課題があった。
【解決手段】ハウスと播種建屋の間に敷いたレールの上をバッテリ駆動で自走する運搬車と、ハウスの苗箱敷設機に連結する台車とに、電動のベルトコンベアを設け、両ベルトコンベアを駆動して苗箱を運搬車から台車へ移すようにすると共に、台車に発信機付きの台車制御器をまた運搬車に受信機付きの運搬車制御器をそれぞれ搭載し、台車から運搬車の運転を無線でリモコン操作可能とする。これにより苗箱輸送の省力化が可能となると共に、離れた場所から運搬車が操作可能となり操作性の向上が図れる。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け渡しの際の位置決めをより好適に行う。
【解決手段】ロール体搬送用無人搬送車100は、ロール体の胴部が載置される載置台102と、ターレットに対する載置台102の位置を検出する第1位置検出器138、第2位置検出器140と、載置台102を非鉛直方向に動かす移動部と、載置台102を回転させる回転部と、本体168がロール体をターレットに渡すために停止しているとき、第1位置検出器138、第2位置検出器140によって検出される載置台102の位置が所定の基準位置に近づくように、移動部および回転部のうちの少なくともひとつを制御する制御部50と、を備える。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け取りをよりスムーズに行う。
【解決手段】ロール体搬送用無人搬送車100は、ターレットによって空中に支持されているロール体の胴部に鉛直方向下側から接触する載置台102と、載置台102にかかる荷重を検出する荷重検出部と、荷重検出部によって検出される荷重に基づいて、載置台102がロール体を押す力を調整する荷重調整部と、を備える。荷重調整部は、荷重検出部によって検出される荷重がロール体の重量に近づくように、載置台102がロール体を押す力を調整する。
(もっと読む)
荷搬送設備
【課題】搬送台車がパレットの下にもぐり込みパレットを持ち上げて搬送する構成であって、パレットを置く位置を提示する位置決めガイドを不要にでき、また作業者の負担を軽減できる荷搬送設備を提供することを目的とする。
【解決手段】パレット13の平板23の裏面に第1ガイドライン41を設け、搬送台車12は、このパレット13に設けられた第1ガイドライン41を検出し、第1ガイドライン41に沿って移動し、支持脚24の間の空間21にもぐり込み、リフタ32によるパレット13への持ち上げ位置へ自動誘導される構成とする。この構成により、パレット13を所定位置にラフに置いても、搬送台車12を、前記持ち上げ位置に正確に停止することができ、よってパレット13を置く位置を提示する位置決めガイドの設置を不要にすることができ、また作業者の負担を軽減できる。
(もっと読む)
自動搬送車
【課題】ワークの受渡しを円滑に行うことができ、しかも、ワークの受渡しにかかる時間を短縮することができる自動搬送車を提供する。
【解決手段】所定の搬送経路に沿って走行し、ワークを搬送する自動搬送車1であって、ワークを載置するための載置台2と、載置台2の下方に設けられた基台3と、載置台2と基台3との間に挟まれ、球面において載置台2または基台3の中心に当接した球面体4と、球面体4を中心として載置台2の下面に点対称に設けられ、載置台2を水平方向に傾動させる4つの傾動装置5−1、5−2、5−3、5−4と、少なくとも載置台2を昇降させる昇降装置6と、傾動装置5−1、5−2、5−3、5−4および昇降装置6を制御する制御装置と、を備えたことを特徴とする。
(もっと読む)
搬送車システム
【課題】搬送車が横行走行によってステーションに接近する場合の走行精度を高める。
【解決手段】搬送車システム1は、ステーション3と、走行部20と、被検出部49と、第1〜第3距離センサ41、43および45と、走行制御部63とを備えている。ステーション3は、無軌道の第1走行路5に対してX方向に交差するY方向に離れて配置されている。走行部20は、縦行走行と横行走行が可能であり、第1走行路5を縦行走行する。被検出部49は、ステーション3に設けられている。第1〜第3距離センサ41、43および45は、走行部20に設けられ、被検出部49を検出する。走行制御部63は、第1〜第3距離センサ41、43および45からの検出結果に基づいて、走行部20を横行走行でステーション3に接近させながら走行部20の位置および姿勢を制御する。
(もっと読む)
車両
【課題】弾性体に備蓄された弾性力が経路途中ですべて消費される事態を防止できる車両を提供すること。
【解決手段】車体フレーム24の補助駆動輪38に連結され、動力を弾性力に変換して備蓄可能な一方、備蓄した弾性力を動力として補助駆動輪に出力可能なぜんまいばね32を含むエネルギ備蓄機構34と、このエネルギ備蓄機構34のぜんまいばね32に動力を入力する第2シャフト41bと、ぜんまいばね32に備蓄された弾性力を補助駆動輪38に出力する第1シャフト41aと、これら各シャフト41a,41bの回転数に基づいてぜんまいばね32に備蓄された弾性力の残量を算出する。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて移載装置のコストを低減する。
【解決手段】搬送車システム1は、軌道3と、搬送車5と、バッファ9とを備えている。軌道3は、複数の処理装置2に沿って設けられている。搬送車5は、軌道3を走行して物品を搬送する。バッファ9は、軌道3の側方に配置され、ローラコンベア63からなる載置面を有する。搬送車5は、支持台としてのローラコンベア39と、プッシュプル移載装置41とを有している。ローラコンベア39は、バッファ9のローラコンベア63と同一高さの支持面を有する。プッシュプル移載装置41は、物品を押し引きすることでバッファ9と搬送車5との間で移動させる。
(もっと読む)
移載機能付ロボットシステム
【課題】移動ロボットを用いて荷物を自動的に積込み、積降しを確実に行うこと。
【解決手段】前記ロボットが前記設備ローダに対する相対的な位置及び方向の制御を行う位置決め制御手段と、前記搭載ローダ、及び、前記設備ローダにおける荷物の積載の有無をそれぞれ検出する第1、及び、第2の荷物検出手段と、該第1、及び、第2の荷物検出手段の出力により、前記搭載ローダと前記設備ローダの間で、移載開始から移載終了までの荷物の移載動作を通信して制御する移載制御手段とを備え、前記移載制御手段が移載終了と判断した後、前記ロボットが設備ローダから移動する手段を備える。
(もっと読む)
1 - 10 / 72
[ Back to top ]