
国際特許分類[B62D111/00]の内容
国際特許分類[B62D111/00]に分類される特許
71 - 80 / 843
操舵制御装置
【課題】道路状態や走行状態に応じた目標舵角を設定し、この目標舵角に近づくように操舵反力トルクの制御や、自動操舵の制御時、ドライバの操舵による負担を低減する操舵制御装置を提供する。
【解決手段】操向輪の転舵角と走行路形状に応じた転舵角である目標転舵角との差が小さくなる方向に、操向輪の転舵角が変化しているときには、操舵量に対して転舵量が大きくなるようにする。
(もっと読む)
リフトアップ判定装置及び電動パワーステアリング装置

【課題】駆動方式にかかわらず、精度よく、車両のリフトアップ状態を判定することのできるリフトアップ判定装置を提供すること。
【解決手段】リフトアップ判定部は、車輪速に基づき検出される車速Vが車両走行状態(走行中)を示す値であり(V>V0)、且つ操舵角θsが発生しているにもかかわらず(θs>θ0)、車両が旋回中であると判定可能なヨーレイトγ又は横方向加速度Gsが検出されない場合(γ≦γ0又はGs≦G0)に、車両がリフトアップ状態にあると判定する。
(もっと読む)
車両用操舵制御装置
【課題】 運転者の意図しないステアリング操作を回避し、運転者に違和感を与えることのない車両用操舵制御装置を提供すること。
【解決手段】 運転者によって操舵されるステアリングの操舵状態に応じて操向輪を転舵する転舵手段と、ステアリングに操舵反力を付与する反力付与手段と、を備えた車両用操舵制御装置において、運転者の意図しない操舵操作が発生する状況を検出したときは、ステアリング操舵角の変化を抑制するように操舵反力を付与することとした。
(もっと読む)
障害物回避支援装置及び障害物回避支援方法
【課題】運転者の意図に応じた障害物回避支援の解除を確実に反映できるようにする。
【解決手段】自車両前方に回避が必要な障害物を検出すると、その障害物に対する回避軌道を求め、その回避軌道に基づいて自車両を走行制御するための追従操舵力を算出する。その算出した追従操舵力と運転者の操舵力に基づいてアシスト操舵力を算出して障害物回避のための走行制御を行う。そして、上記運転者の操舵力がアシスト操舵力に対抗して保舵する力を超えたことを検出したら、自車両のアシスト操舵力の解除と判定する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
操舵装置及び操舵制御装置
【課題】状態に応じて運転感覚を変えることができる操舵装置及び操舵制御装置を提供することを目的とする。
【解決手段】車両に設けられ回転操作可能である操舵部材2と、操舵部材2の回転方向の振動を調節可能である調節装置6と、車両の運転状態に応じて調節装置6を制御して操舵部材2の回転方向の振動を調節する制御を実行可能である操舵制御装置8と備えることを特徴とするので、状態に応じて運転感覚を変えることができる。調節装置6は、例えば、操舵部材2に伝達される振動の伝達度合いを調節可能であり、操舵制御装置8は、例えば、操舵部材2に伝達される振動の伝達度合いを調節することで操舵部材2の回転方向の振動を調節することができる。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
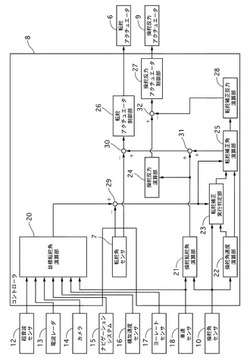
車両の運動制御装置
【課題】制御可能範囲が拡大され、よりアクティブな制御介入が実現できる車両の制御装置を提供することを目的とする。
【解決手段】操作状態量及び運動状態量に対応した車両の規範姿勢状態量を、所定の外力が作用する状態における車両の運動モデルにもとづき演算する規範姿勢状態量演算手段54と、路面摩擦係数推定値を含む前記車両の実姿勢状態量を推定する実姿勢状態推定部52と、実姿勢状態量(慣性力)および前後力に基づき路面摩擦係数相当値を決定する路面摩擦係数相当値決定部200と、実姿勢状態推定部が推定した前記路面摩擦係数推定値と前記路面摩擦係数相当値決定部200が決定した路面摩擦係数相当値に基づき、実路面摩擦係数を推定する実路面摩擦係数推定部400とを備えることを特徴とする車両の運動制御装置
(もっと読む)
操舵制御装置
【課題】操舵制御装置において、車両挙動の安定化させつつ、車両の前後輪の操舵をより適切に制御することを可能とする。
【解決手段】操舵制御装置100は、所定の走行軌跡を走行するように操舵輪の舵角を変更可能な操舵機構200を備えた車両10の操舵制御装置であって、車両を所定の走行軌跡に追従させるための操舵輪の目標舵角を特定する特定手段240と、特定された目標舵角を、前記車両の加速度に基づいて補正する第1の補正手段100と、操舵輪の舵角が前記補正された目標舵角になるように前記操舵機構を制御する制御手段100とを備える。
(もっと読む)
71 - 80 / 843
[ Back to top ]