
国際特許分類[B62D111/00]の内容
国際特許分類[B62D111/00]に分類される特許
51 - 60 / 843
車両用制御装置
【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
車両の操舵力制御装置

【課題】オーバステア状態発生時、運転者のカウンタステア操作を補助するとともに、その後に運転者のカウンタステアの戻し操作をも補助し得る車両の操舵力制御装置の提供。
【解決手段】この装置では、車両が一方向に旋回している場合において、オーバステア状態量Josが増大しながら第1閾値ko1を跨いだことに基づいて、電気モータMTの駆動トルクを利用して車両のオーバステア状態を打ち消す方向の操舵力(第1操舵力)がステアリングホイールSWに対して付与される。これにより、カウンタステア操作が補助される。その後、オーバステア状態量Josが減少しながら第2閾値ko2(<ko1)を跨いだことに基づいて、電気モータMTの駆動トルクを利用して第1操舵力と逆方向の操舵力(第2操舵力)がステアリングホイールSWに対して付与される。これにより、カウンタステアの戻し操作が補助される。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために作動する制御対象の制御量を演算し、演算した制御量に基づいて制御対象を制御する。また、車両のドライバの操舵操作量に基づいて制御対象の制御を停止するか否かを判断する。制御対象の制御を停止すると判断したときに、そのときから制御対象の制御量が縮退するように縮退制御量を決定する。制御対象の制御を停止すると判断したときに、決定した縮退制御量に基づいて制御対象の制御量を制御する。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をVLP、より詳しくはVLPのF/F演算部6やF/B演算部7に伝え、アベイラビリティに基づいて車両横方向運動制御に使用する制御対象の優先順位を決定する。このように、各制御対象のアベイラビリティを加味して車両横方向運動制御に使用する制御対象の優先順位を決定しているため、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】F/B演算部7での制御対象の選択について、各制御対象のアベイラビリティである最大制御量から各制御対象のF/F要求値を引いた差から各制御対象の余裕度を演算し、この余裕度に基づいて行うようにする。これにより、余裕度がF/B要求値よりも大きな制御対象を選択して車両横方向運動制御を実行することが可能となる。したがって、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
走行支援装置及び方法
【課題】車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速との調和を図り、車輌を安定的に走行させる技術を提供する。
【解決手段】車線境界を示す道路標示又は走行不可域を基準にして車輌の走行可能な走路を設定し、当該走路からの車輌逸脱時に、車輌を走路内で走行させるように補助を行う走行支援装置であって、車輌が走路を超えないための目標ヨーレートYtrgよりも実際のヨーレートYreaが小さい場合にその差△Yに応じて、車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速とを個別に制御する。
(もっと読む)
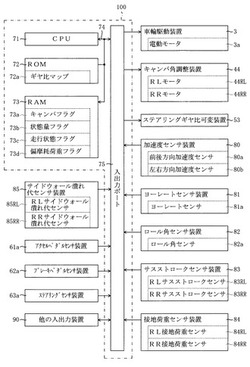
車両用制御装置
【課題】横加速度の向きとヨーレートの向きを利用して車両の前進または後退を精度良く判定する。
【解決手段】車両用制御装置は、横加速度ayとヨーレートωとに基づいて車両の前進・後退を判定する進行方向判定手段24と、横加速度ayと基準値との偏差である横加速度変動量Δayを算出する変動量算出手段23と、転舵速度算出手段22とを備える。進行方向判定手段24は、ステアリングを左に操舵するときの転舵速度Δθの符号と、安定して左旋回しているときに作用する横加速度ayの符号を正と規定し、ステアリングを右に操舵するときの転舵速度Δθの符号と、安定して右旋回しているときに作用する横加速度ayの符号を負と規定したとき、横加速度変動量Δayの絶対値が第1の所定値以上であり、かつ、横加速度変動量Δayおよび転舵速度Δθのうち、一方が正であり、他方が負であるとき、車両が前進しているという判定を行わないように構成される。
(もっと読む)
51 - 60 / 843
[ Back to top ]