
国際特許分類[B62D5/04]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 動力補助または動力駆動される操向 (7,105) | 電気的なもの,例.操向伝動装置に,連結され,またはその一部を形成する電気サーボモータを用いるもの (5,655)
国際特許分類[B62D5/04]に分類される特許
101 - 110 / 5,655
電動パワーステアリング装置
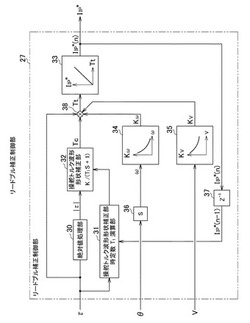
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】トルクセンサから検出された操舵トルクτの形状を生成する操舵トルク波形形状補正手段(32)によって、操舵トルクτの波形形状を運転状態に最適な波形形状の補正操舵トルクTcに補正する。そして、その補正操舵トルクTcと、操舵トルクτの乗算により算出されたリードプル補正量Iip*の値により、アシスト力を増減する。
(もっと読む)
電動パワーステアリング用電動機及び電動パワーステアリング装置

【課題】希土類磁石成分を低減し、モータの製造コストを低減できる電動パワーステアリング用電動機及び電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング用電動機は、ロータヨーク及びロータヨークの外周にロータヨーク内で閉磁路ができるように埋め込まれ、磁束密度が1.2T以上かつ保磁力が1400kA/m以下である複数の平板状のマグネットを含むロータと、ロータヨークの外側に所定の間隔を有して環状に配置されるステータコア及びステータコアを励磁しロータにリラクタンストルク及びマグネットトルクを生じさせる励磁コイルを含むステータと、を含む。
(もっと読む)
操舵トルク検出方法及び電動パワーステアリング装置
【課題】従来に比して簡易な構成による操舵トルクの検出を可能とする電動パワーステアリング装置を提供する。
【解決手段】運転者のステアリング・ホイール3の操作による操舵トルクを電動モータ7により助勢し、舵取装置6を介して車輪15a,15bへ伝達可能に構成されてなる電動パワーステアリング装置において、ステアリング・ホイール3と舵取装置6との間には、トーションバーン12を挟んで、2つのジャイロセンサ2a,2bが設けられ、2つのジャイロセンサ2a,2bにより検出された角速度ω1,ω2の差の積分値が算出され、その積分値に基づいて所定の演算式により操舵トルクが算出されるよう構成されたものとなっている。
(もっと読む)
車両用操舵装置
【課題】電動パワーステアリング装置の異常によるアシスト停止後もステアリング操作により車両の旋回を継続できる車両用操舵装置を提供する。
【解決手段】ABS装置30は、電動パワーステアリング装置1のECU11の制御状態量である操舵トルクτを取得する(ステップS401)。異常検出信号Spsfの入力があるか否かを判定し(ステップS402)、異常検出信号Spsfの入力がある場合(ステップS402:YES)には、続いてステアリング操作中であるか否かを判定する(ステップS403)。ステアリング操作中であると判定した場合(ステップS403:YES)には、受信した操舵トルクτに基づき、所定の転舵輪7に付与する制動力を演算する(ステップS404)。ここで、通常時の制動力に演算された制動力分が補正される。そして、その制動力を制御指令として出力(ステップS405)し、ブレーキアクチュエータ31を制御する。
(もっと読む)
操舵支援装置
【課題】車線の逸脱を防止するためにガイダンストルク指令値を増加補正することができ、しかもガイダンストルク指令値が不必要に増加補正されるのを抑制できる操舵支援装置を提供する。
【解決手段】ゲイン設定部51は、TLC演算部41によって演算された車線逸脱予想時間TLCに基づいて、ガイダンストルク指令値補正用のゲインGを演算する。車線逸脱予想時間TLCが所定値C未満の領域においては、ゲインGは、車線逸脱予想時間TLCの減少に応じて下限値(=1)から上限値Gmax(>1)まで単調に増加するように設定されている。ゲイン乗算部52は、ガイダンストルク指令値補正用のゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*’を求める。
(もっと読む)
電動機、電動機制御装置及び電動パワーステアリング装置
【課題】製造コストを低減できる電動機、電動機制御装置及び電動パワーステアリング装置を提供する。
【解決手段】電動機は、ロータヨークと、ロータヨークの外側にギャップを有して環状に配置されるステータコアと、低保磁力部と低保磁力部よりも保磁力が高い高保磁力部とを含み、低保磁力部が高保磁力部よりもギャップ側となるようにロータヨークに埋め込まれるマグネットと、ステータコアを励磁し、かつ低保磁力部の磁束量を変化させるための磁界を発生させる励磁コイルと、を含む。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車両用走行制御装置
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
操舵制御装置
【課題】操舵制御装置において、車両が路面の轍や落下物を通過して車両の進路に影響するような外乱が入ったとしても、車両の安定性を確保して直進を継続しやすくすることにある。
【解決手段】操舵用制御手段(12)は、判定手段(12A)により運転者が操舵ハンドル(6)を握っていないと判定された時に、操舵ハンドル(6)をセンター位置に維持するように操作力軽減アクチュエータ(10)の作動を制御する制御信号をアクチュエータ制御手段(11)に出力する。
(もっと読む)
ステアリング装置
【課題】一枚の板材を折り曲げて形成することによって製造コストを低減した車体取付けブラケットを有するステアリング装置を提供する。
【解決手段】折り曲げて成形した状態では、接続上板32の板厚T2を、左側上板31L、左側側板33L、右側上板31R、右側側板33Rの板厚T1よりも厚く形成している。左側上板31L、左側側板33L、右側上板31R、右側側板33Rの板厚T1は、板材の板厚とほぼ同一である。変形例として、接続上板32の長さC2、長さC4の部分の板厚を、板厚T1と板厚T2の中間の厚さにしてもよいし、板厚T1と同一の厚さにしてもよい。
(もっと読む)
101 - 110 / 5,655
[ Back to top ]