
国際特許分類[B62D57/02]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 車輪または軌道帯以外の他の推進装置または接地装置を単独または車輪または軌道帯に加えて有することを特徴とする車両 (133) | 接地推進装置を持つもの,例.足踏部材 (133)
国際特許分類[B62D57/02]の下位に属する分類
無限軌道帯で特に傾斜面または垂直面上の移動に適するもの (72)
車輪の他に機械的脚をもつもの (7)
交互にまたは連続して持ち上げられる支持台と脚をもつもの;交互にまたは連続して持ち上げられる足または滑走部をもつもの (24)
らせん形のもの,例.アルキメデスのらせん (3)
国際特許分類[B62D57/02]に分類される特許
1 - 10 / 27
クランク付車輪を備える車両
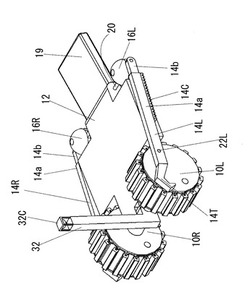
【課題】平地での滑らかな移動性と荒れ地での高い不整地踏破性があり、車輪型車両の堅牢性と防塵防水性を発揮する移動機構を提供すること。
【解決手段】 車両における車輪10Lおよび車輪10Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、伸縮可能なリンク部材14L、14Rの一端が連結されており、リンク部材14L,14Rの他端が、球形自在車輪16Rが設けられる支持軸20の一端に回動可能に連結されているもの。
(もっと読む)
走行ロボット

【課題】簡素な構成で、走破性と精密作業性を両立するための技術を提供する。
【解決手段】走行ロボット1は、台車3とアームユニット4を備えている。台車3は、台車本体5と、台車本体5に取り付けられた右駆動輪6a及び左駆動輪7aと、右駆動輪6a及び左駆動輪7aを平面視で結んだ直線Lを挟むように、台車本体5に取り付けられた前輪8a及び後輪9と、を有する。前輪8aは、前輪8aの回転軸と、台車本体5と、の鉛直方向における相対的な位置関係が変動可能となるように台車本体5に弾性的に支持されている。後輪9は、後輪9の回転軸と、台車本体5と、の鉛直方向における相対的な位置関係が変動不能となるように台車本体5に支持されている。アームユニット4による作業の際は、走行ロボット1全体のZMPが、右駆動輪6a及び左駆動輪7aと、後輪9と、を平面視で結ぶことで特定される多角形領域Aの内側に留まるようにした。
(もっと読む)
車輪型移動体
【課題】歩行者に追従して移動可能な移動体を提供する。
【解決手段】 この移動体10は、本体20と、本体の右側面に設けられた第1車輪12bと、第1車輪を回転させる第1駆動モータ14bと、本体に対して第1車輪を上下方向に相対移動させる第1上下方向移動機構24bと、本体の左側面に設けられた第2車輪12aと、第2車輪を回転させる第2駆動モータ14aと、本体に対して第2車輪を上下方向に相対移動させる第2上下方向移動機構24aと、本体に設けられており、第1及び第2車輪に対して本体の前後方向に隔てられた位置に配置されている第3車輪18と、第1駆動モータ、第1上下方向移動機構、第2駆動モータ及び第2上下方向移動機構を制御する制御部と、を有している。第3車輪18は、従動輪であり、かつ、全方位輪又は球面キャスタである。
(もっと読む)
管内移動装置
【課題】配管の内部形状が変化してもスムーズに移動可能な管内移動装置を提供する。
【解決手段】管内移動装置本体と複数の駆動機構3を備え、駆動機構本体3aに対して回転自在な駆動車輪Wと、駆動車輪Wを回転駆動する駆動部3bと、駆動車輪Wを管内壁に付勢する付勢手段Sとを備え、駆動車輪Wは、車軸と車軸の両端側に備えられる一対の輪体W2を備え、輪体W2は、車軸に平行な第1走行面W2aと、車軸端側に位置され、車軸の軸端側で閉じた凸状の走行面である第2走行面W2bとを有し、付勢手段Sは、一対の輪体W2が駆動機構本体3aと等距離に維持される第1姿勢と、一対の輪体W2に関して、一方の輪体W2が他方の輪体W2より近接した傾斜姿勢である第2姿勢に姿勢変更自在に構成されている。
(もっと読む)
管内作業装置及び方法
【課題】小口径でかつ曲がり管を有する管の内側を通過させ、管の内側から各種の作業を正確に行うことのできる管内作業装置を提供する。
【解決手段】配管(管路)11内を移動可能な少なくとも第1の作業用ユニット4と第2の作業用ユニット5を、接続部材2を介して接続する管内作業装置である。接続部材2は、直線を記憶した形状記憶合金製の第1の接続部2aと、配管(管路)11の曲率に対応した曲線を記憶した形状記憶合金製の第2の接続部2bとを備える。
(もっと読む)
車両用推進装置
【課題】舗装道路での走行のみならず、雪上や湿地等においても十分な推進力を得ることのできる車両用推進装置を提供する。
【解決手段】車両1の推進方向に延びる第1の回転軸11aを中心とする螺旋状に形成され、第1の回転軸11aを中心に回転するスクリュー状の回転体11と、回転体11のスクリュー部11bの周端面に沿って螺旋状に配列され、回転体11の軸方向に対して所定の傾斜角度をなす第2の回転軸を中心に転動するように設けられた多数の転動体12とを備え、舗装道路を走行する場合は、各転動体12が回転体11の回転方向への転動を規制されながら路面との接地によりスクリュー部11bの接線方向に転動することにより、回転体11の軸方向への推進力が得られる。また、雪上路や湿地等を走行する場合は、各回転体11のスクリュー部11bが雪や泥を後方に押し出す力によって推進力が得られる。
(もっと読む)
回転する2式の負圧吸着シールを備えた走行装置
【課題】「回転する2式の負圧吸着シールを備えた走行装置」において走行機能を向上する。
【解決手段】走行軸線の左右には各1式の回転する負圧吸着シールを備えており、一方の負圧吸着シールの回転軸線と走行軸線との距離は他方の負圧吸着シールの回転軸線と走行軸線との距離とほぼ等しく、各々の負圧吸着シールの外周形状は、回転軸線から最も遠い外周端部である最遠外周端部と、回転軸線から最も近い外周端部である最近外周端部を備えた形状を成し、各々の負圧吸着シールの内部には駆動される車輪を備えている、ことを特徴とする、回転する2式の負圧吸着シールを備えた走行装置を提供する。
(もっと読む)
走行用ホイール
【課題】 砂地や泥地等の軟弱地盤での走行性を高めたホイールを提供する。
【解決手段】
月探査用等に用いられるロボットは、ボデイ1と、このボデイ1の左右において前後に離れて設けられたホイール2を備えている。各ホイール2は、ループアッセンブリ10と一対のガイド板20とを備えている。ループアッセンブリ10は、ハブ11と、ハブ11の外周に等間隔をおいて固定された複数の内側弾性ループ12と、内側弾性ループ12に外接固定された外側弾性ループ13とを備えている。弾性ループ12,13はスチールベルトからなり、バネ弾性を有している。一対のガイド板20は水平方向に細長く形成されて外側弾性ループ13の両側縁部に嵌り、これにより外側弾性ループ13を上下に潰した形状に弾性変形させている。
(もっと読む)
車両
【課題】簡易な構成としつつ、軟弱地を走行する際のスタックを回避することのできる車両を提供すること。
【解決手段】 スタック回避機構4を備えた車両1が軟弱地を走行して、中輪2M及び後輪2Rが軟弱地内に埋まった状態から(a)、中輪2M及び後輪2Rを回転させてシュー本体14の下面を軟弱地表面に接触させ(b)、さらに中輪2M及び後輪2Rに駆動力を与えることで、各取付軸12を支点にして当該取付軸周りに中輪2M及び後輪2Rが回動させる(c)(d)。
(もっと読む)
水陸両用車両
【課題】簡単な構成としつつ、水上航行を効率よく行うことのできる水陸両用車両を提供すること。
【解決手段】中輪2M及び後輪2Rが水中にある状態から(a)、中輪2M及び後輪2Rを回転駆動させることで、水の抵抗により水掻きブレード12を起立させ(b)、水掻きブレード12がストッパ12cにより回動が停止した直立状態となって水を掻くことで推進力を生じさせる(c)水上航行機構4を車両1に設ける。
(もっと読む)
1 - 10 / 27
[ Back to top ]