
国際特許分類[B63B49/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶またはその他の水上浮揚構造物;艤装品 (4,322) | 航海用具または航行用補助具の配置 (169)
国際特許分類[B63B49/00]に分類される特許
161 - 169 / 169
航海データ記録装置及び航海データ記録・再生システム
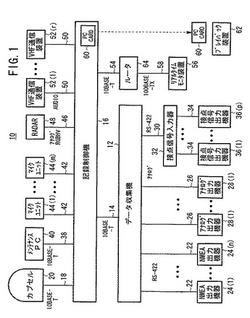
【課題】異なる記録条件で航海データが記録されていても、自動的に前記航海データを再生可能とする航海データ記録・再生システムを提供する。
【解決手段】データ収集機12は、各機器からの航海データを記録制御機16に出力する。記録制御機16は、この記録制御機16に接続されるマイクユニット44(j)、レーダ48及びVHF通信装置52(q)からの航海データにタイムスタンプデータを付与して、前記航海データ及び記録条件データを保護カプセル20及びPCカード60に出力する。プレイバック装置62及びリアルタイムモニタ装置56は、前記記録条件データを再生条件データに設定し、前記航海データの再生処理を行う。
(もっと読む)
船舶位置表示装置

【課題】 船舶から送信される船舶識別信号の送信時間間隔が長くなっても、またはその船舶識別信号の受信不可能な時間が長くなっても、その船舶の位置や状態(針路、船速、停船の有無等の状態)の把握および推定が容易な船舶位置表示装置を構成する。
【解決手段】 船舶から所定時間間隔で送信される船舶識別信号(AISデータ)を受信してその船舶の船舶位置を求め、時間経過に伴う船舶の位置や状態の変化に基づいて、AISデータの受信タイミングとは別のタイミングで船舶の位置を推測し、船舶位置と推測位置とを互いに異なった色・濃度または形態で表示する。
(もっと読む)
船舶の運航管理方法及び装置
【課題】GPSと通信システムを搭載していない船舶の運航管理を大型で高価な陸上レーダを使用せずに行なう方法を提供する。
【解決手段】レーダにより探査可能な複数の管理エリア内の夫々に旋回可能なカメラと、GPSと、通信システムを有する移動式レーダ船を配置し、このレーダ船の位置と、上記レーダ船とこれに対応する上記エリア内に位置する対象船間の距離、方位及びカメラの画像情報を上記レーダ船から陸上の管理事務所に無線伝送し、上記レーダ船と対象船間の位置関係を画像上に合成して表示する。
(もっと読む)
親子型発電機搭載ボート
【課題】水上での遊覧の基地として利用可能で、かつ移動距離を長く確保することができる。
【解決手段】親子型燃料電池搭載ボート1は、相対的に大型な親ボート2と、この親ボート2より小型な1つ以上の子ボート3からなり、親ボート2は、発電装置20を搭載してなり、子ボート3は、バッテリ30と電動推進装置32を搭載してなり、親ボート2に子ボート3をドッキングして電気的に接続し、親ボート2の発電装置20から子ボート3のバッテリ30または電動推進装置32の少なくともいずれかに給電する。
(もっと読む)
船舶内表示器の画面設定方法
【課題】 船内ネットワークに接続された複数の表示器の画面設定を効率よく容易に行うことができる船内表示機の画面設定方法を提供する。
【解決手段】 船内に設けられた複数の表示器1を通信ラインで連結した船内ネットワークを有する船舶における各表示器の画面設定方法において、前記船内ネットワークに端末機4を接続し、該端末機4に前記複数の表示器1のデータを取り込み、該端末機4内で各表示器1の画面設定を行い、表示器1の画面設定が終了した後、画面設定データを前記通信ラインを介して該端末機4から各表示器1に送信する。
(もっと読む)
水底情報更新方法及び装置
【課題】正確に水底の様子を三次元像として表示できるように、水底情報を修正或いはグレードアップして更新する水底情報更新方法及び装置を提供する。
【解決手段】水底情報格納手段5aが、現在位置や航行軌跡が重畳して表示される水面と該水面下の水底地形との三次元像を生成するための水底情報を格納している。水底情報は、所定間隔で予め定めた経緯度線の交点の水底高さ情報を有する。組合せ情報取得手段13aが、船舶が位置する水面下のターゲットの深度を含む探知情報と、探知時に測定した船舶の水面上の位置の経緯度を含む船舶位置情報との組合せ情報を順次取得し、組合せ情報格納手段5bに格納させる。水底高さ演算手段13bが、船舶位置情報の経緯度と、探知情報の水底部分の深度と、探知情報取得時の高さ位置とに基づいて、交点の水底高さを演算し、水底情報格納手段5aに格納されている対応する交点のそれ以前のものと入れ替え更新する。
(もっと読む)
係留ロボット用レーザー走査機
船舶の輪郭上の目標位置の位置決めを行うための輪郭走査機であって、上記輪郭走査機は、上記船舶に向けて、徐々にあるいは即時に放射するために適用される放射機と、そこに入射する放射を示す信号を提供する受信機と、上記放射機を活動させ、上記信号を受信する格納された命令を含み、走査機の上記目標位置の垂直位置を決定する制御装置または処理装置とを備える。  (もっと読む)
(もっと読む)
無人海洋艇
水面上および水面下で操作可能な、海上用途のための無人の自律的な水上輸送艇(500)であって、上記艇(500)は、貨物室(506)を有する密閉型船体(501)、少なくとも太陽エネルギーおよび風力エネルギーを利用するための、光電池で覆われた帆布製通風筒(503)の形態のエネルギー収集手段(504)、およびエネルギー貯蔵手段(511)を有するハイブリッド推進システム、所定の環境パラメータを検出するための複数のセンサ(508、514)、ならびに上記センサ(508、514)から1つ以上の遠隔ステーションおよび/または協働する艇へとデータを送信し、そして1つ以上の遠隔ステーションおよび/または協働する艇からコマンド信号を受信するための通信システム(509、515)を備える。  (もっと読む)
(もっと読む)
自律水泳式貨物コンテナ
【解決手段】本発明は、コンテナターミナル無しに海岸側に商業用貨物コンテナを分配するための装置、方法及びシステムを提供する。本発明は、モーター127及びナビゲーション操舵制御部135を有する取り外し可能な推進システム120をコンテナ105に連結することによりコンテナに自律性を持たせ、水を介して、急速、制御された効率的で安全な貨物コンテナの個別的な配達を可能にする。バラストユニット160、展開システム171〜176、及び、遠隔ユニット181を介した制御も開示される。この改善により、コンテナ105を、固有の浮力を利用して、予め計画された又は遠隔の制御ルートに従って特定の位置に特定の到着順序で自立的に海岸に到着可能にし、これにより要求された貨物取り扱い者の数を減少し、海岸への配達プロセスの速さを向上させ、せん橋側に高い技術の設備を設ける必要を無くす。本発明は、未開の海岸側及び現代のせん橋設備への貨物の輸送を可能にし、必要とされるところは何処でも貨物の配達を促進させる。 (もっと読む)
161 - 169 / 169
[ Back to top ]